You might also like
- Przekładnia PasowaDocument59 pagesPrzekładnia PasowakamelsuxNo ratings yet
- Wahadło MatematyczneDocument9 pagesWahadło MatematycznePaulina PaolaNo ratings yet
- Sprawozdanie WahadloDocument4 pagesSprawozdanie WahadloNikola CisekNo ratings yet
- Sprawozdanie 4 FizykaDocument7 pagesSprawozdanie 4 FizykaoliwiaskaNo ratings yet
- Rozwiazania Karty Pracy Ucznia Klasa 3 Drgania I FaleDocument11 pagesRozwiazania Karty Pracy Ucznia Klasa 3 Drgania I FaleMelNo ratings yet
- Przykladowe SprawozdanieDocument5 pagesPrzykladowe SprawozdaniejanNo ratings yet
- Sprawozdanie 1 (Wahadło Fizyczne)Document4 pagesSprawozdanie 1 (Wahadło Fizyczne)Przemek Tomaszewski100% (1)
- Sprawozdanie 252Document6 pagesSprawozdanie 252DomsiNo ratings yet
- 20a SPRDocument8 pages20a SPRLuke Koltun100% (1)
- Wyznaczanie Przyśpieszenia Grawitacyjnego Używając Wahadła MatematycznegoDocument5 pagesWyznaczanie Przyśpieszenia Grawitacyjnego Używając Wahadła MatematycznegoAda StachowskaNo ratings yet
- SPR A Woz Danie TRP DobreDocument9 pagesSPR A Woz Danie TRP DobreMati GlińskiNo ratings yet
- Pierścienie Newtona PDFDocument5 pagesPierścienie Newtona PDFFilip PędowskiNo ratings yet
- ćwzeroDocument5 pagesćwzeroopyka514No ratings yet
- Uwaga! Przykładowe Sprawozdanie Z Laboratorium FizykiDocument8 pagesUwaga! Przykładowe Sprawozdanie Z Laboratorium FizykiminissNo ratings yet
- Sprawozdanie nr.12 fale elektromagnetyczneDocument6 pagesSprawozdanie nr.12 fale elektromagnetycznepiotr.pawlusNo ratings yet
- Sprawozdanie zginanie prętaDocument6 pagesSprawozdanie zginanie prętamiketencikNo ratings yet
- ćw 29Document8 pagesćw 29Filip FerencNo ratings yet
- Arkadiusz Rozmus - Badanie Pompy WirowejDocument4 pagesArkadiusz Rozmus - Badanie Pompy WirowejArkadiusz RozmusNo ratings yet
- Projekt WordDocument6 pagesProjekt Wordmyszkamiki741No ratings yet
- 4wykres PiezometrycznyDocument6 pages4wykres PiezometrycznyBartosz AugusewiczNo ratings yet
- Prawo OhmaDocument6 pagesPrawo OhmaFilip FerencNo ratings yet
- Budo Wodne Cz. 1Document15 pagesBudo Wodne Cz. 1kborowska2406No ratings yet
- Sprawozdanie 3 FizykaDocument6 pagesSprawozdanie 3 FizykaoliwiaskaNo ratings yet
- Korekcja Zazebieniaa4Document10 pagesKorekcja Zazebieniaa4robson2015No ratings yet
- Ref. Morawski - Zmiany W... Popow 2014Document10 pagesRef. Morawski - Zmiany W... Popow 2014szystNo ratings yet
- Metrologia Sprawozdanie 6Document8 pagesMetrologia Sprawozdanie 6Sebastian ZawistowskiNo ratings yet
- sprawozdanie ćw 57cDocument10 pagessprawozdanie ćw 57cFilip FerencNo ratings yet
- Ćwiczenie 408: Wyznaczanie Momentu Bezwładności Bryły Metodą Wahadła FizycznegoDocument3 pagesĆwiczenie 408: Wyznaczanie Momentu Bezwładności Bryły Metodą Wahadła Fizycznegommzphgv59jNo ratings yet
- Wyznaczanie Przyśpieszenia Ziemskiego Za Pomocą Wahadła RewersyjnegoDocument4 pagesWyznaczanie Przyśpieszenia Ziemskiego Za Pomocą Wahadła RewersyjnegoMichalina BoguńNo ratings yet
- Strugarka GleasonaDocument10 pagesStrugarka GleasonasensacjeNo ratings yet
- 03 - Ugięcie - Metoda Dokładna - Przykład PDFDocument5 pages03 - Ugięcie - Metoda Dokładna - Przykład PDFIgor PeregudNo ratings yet
- Cwiczenie 6Document10 pagesCwiczenie 6PlNo ratings yet
- WahadłoDocument5 pagesWahadłoMalgorzata KusiakNo ratings yet
- Wzor SprawozdaniaDocument3 pagesWzor Sprawozdania261643No ratings yet
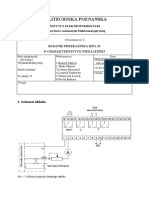
- Politechnika Poznańska: Badanie Przekaźnika Ritx 21 O Charakterystyce NiezależnejDocument4 pagesPolitechnika Poznańska: Badanie Przekaźnika Ritx 21 O Charakterystyce NiezależnejNot MeNo ratings yet
- Badanie Naprężeń W Spoinach PachwinowychDocument7 pagesBadanie Naprężeń W Spoinach PachwinowychdzindzinNo ratings yet
- PKM1Document7 pagesPKM1matpisarzewski4No ratings yet
- No Nie WyszłoDocument3 pagesNo Nie WyszłoStarsza KrewNo ratings yet
- Pomiary I-V Złącza P-NDocument15 pagesPomiary I-V Złącza P-Nradiklox2004No ratings yet
- STS - Sprawozdanie Do EgzaminuDocument20 pagesSTS - Sprawozdanie Do EgzaminuFlak KrystianNo ratings yet
- Wyznaczanie Momentu Bezwładności Brył NieregularnychDocument3 pagesWyznaczanie Momentu Bezwładności Brył NieregularnychKuba Paweł CzerwonkaNo ratings yet
- Wyznaczanie Przyspieszenia ZiemsDocument19 pagesWyznaczanie Przyspieszenia ZiemsAnia kNo ratings yet
- 46 Labfizcw 46Document9 pages46 Labfizcw 46yorkieNo ratings yet
- Czy Okres Drgan Wahadla Matematycznego Jest Zalezny Od DlugosciDocument32 pagesCzy Okres Drgan Wahadla Matematycznego Jest Zalezny Od Dlugoscikarolek abeceNo ratings yet
- Sprawozdanie 2 - A. Dziedzic, J. FilipekDocument6 pagesSprawozdanie 2 - A. Dziedzic, J. FilipekDominika SNo ratings yet
- Sprawozdanie 100bDocument3 pagesSprawozdanie 100bStarsza KrewNo ratings yet
- 01 - Wyznaczanie Momentu Bezwładności Ciał Metodą Wahadła Fizycznego I Sprawdzenie Twierdzenia Steinera.Document8 pages01 - Wyznaczanie Momentu Bezwładności Ciał Metodą Wahadła Fizycznego I Sprawdzenie Twierdzenia Steinera.Jakub .BarańskiNo ratings yet
- Sprawozdanie Z Ćwiczenia 103Document9 pagesSprawozdanie Z Ćwiczenia 103Kamil WalczakNo ratings yet
- Moj ProjektDocument13 pagesMoj Projektkamilek69No ratings yet
- Wiertarka PromieniowaDocument8 pagesWiertarka PromieniowasensacjeNo ratings yet
- Pomiar Współczynnika Lepkości Cieczy Za Pomocą Wiskozymetru HöppleraDocument10 pagesPomiar Współczynnika Lepkości Cieczy Za Pomocą Wiskozymetru HöppleraArtur KuśNo ratings yet
- 19 Ruch Jednostajnie Opozniony PDFDocument12 pages19 Ruch Jednostajnie Opozniony PDFKlaudia SzabatNo ratings yet
- SPR 44Document6 pagesSPR 44julo7No ratings yet
- Ćw nr 2 _ Strona tytułowa _ Wprowadzenie i wytyczne wykonaniaDocument6 pagesĆw nr 2 _ Strona tytułowa _ Wprowadzenie i wytyczne wykonaniaxyp8jd5dkcNo ratings yet
- Laborka MiziaDocument4 pagesLaborka MiziaZofia BerezowskaNo ratings yet
- cw.17 Fizyka 1Document9 pagescw.17 Fizyka 1wiktoria.melaniuk34No ratings yet
- Stanowisko Badania Probek Stali DSM - 1Document12 pagesStanowisko Badania Probek Stali DSM - 1100regNo ratings yet
- Wyznaczanie Modułu Younga Z UgięciaDocument4 pagesWyznaczanie Modułu Younga Z UgięciaKuba Paweł CzerwonkaNo ratings yet