You might also like
- Operational Amplifiers NewDocument20 pagesOperational Amplifiers NewLester Garcia100% (1)
- CH 2 Operational Amplifiers 2022Document88 pagesCH 2 Operational Amplifiers 2022鄭又嘉No ratings yet
- OP-amp ProblemsDocument29 pagesOP-amp ProblemsRaghul RNo ratings yet
- Mindray PM9000 - Service ManualDocument80 pagesMindray PM9000 - Service Manualjuanca6L100% (2)
- Op AmpDocument57 pagesOp AmpDivyanshu Yadav100% (1)
- CA110061 - NB906 - ICCP ManualDocument74 pagesCA110061 - NB906 - ICCP ManualBùi Công Lộc100% (1)
- VLF-65E: VLF Cable Testing For Cables Rated To 35kVDocument1 pageVLF-65E: VLF Cable Testing For Cables Rated To 35kVMarcos Willian RodriguesNo ratings yet
- CC415 Chapter 2 Signal ConditioningDocument39 pagesCC415 Chapter 2 Signal Conditioningmech314No ratings yet
- Chapter 2: Operational Amplifiers This Handout Covers Chapter 2.1-2.3Document18 pagesChapter 2: Operational Amplifiers This Handout Covers Chapter 2.1-2.3Muhammad Saad ZiaNo ratings yet
- Chapter 2 SEMII 1718 260218Document58 pagesChapter 2 SEMII 1718 260218KhayrinNajmiNo ratings yet
- Part IV OpampDocument45 pagesPart IV OpampKunalNo ratings yet
- Adobe Scan 11 Feb 2024Document13 pagesAdobe Scan 11 Feb 2024ankitbhatt268No ratings yet
- Chap5 BEKG1113Document30 pagesChap5 BEKG1113am2030No ratings yet
- Operational Amplifiers: Op-Amp Terminals and SymbolsDocument11 pagesOperational Amplifiers: Op-Amp Terminals and SymbolsHayel ZayedNo ratings yet
- Linear & Digital IcDocument282 pagesLinear & Digital IcdigitalromNo ratings yet
- Lab 2: Op Amp Circuits: - Vin + - VoutDocument2 pagesLab 2: Op Amp Circuits: - Vin + - VoutJing Jing LeeNo ratings yet
- Operational Amplifier PDFDocument45 pagesOperational Amplifier PDFAnonymous H6zpNuNo ratings yet
- Introduction To Op-Amp PDFDocument23 pagesIntroduction To Op-Amp PDFJeswant TSNo ratings yet
- Microelectronic Circuits I: CH 2: Operational AmplifiersDocument15 pagesMicroelectronic Circuits I: CH 2: Operational AmplifierssimayyilmazNo ratings yet
- Operational AmplifierDocument18 pagesOperational Amplifierashik ahmedNo ratings yet
- Operational Amplifiers and ApplicationsDocument47 pagesOperational Amplifiers and Applicationsilias ahmedNo ratings yet
- ElectronicsDocument20 pagesElectronicsMulugeta WoldeNo ratings yet
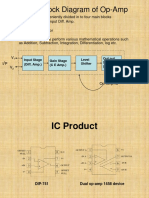
- Basic Block Diagram of Op-Amp: Input Stage (Diff. Amp.) Gain Stage (C E Amp.) Level Shifter Out Put Stage (Buffer)Document26 pagesBasic Block Diagram of Op-Amp: Input Stage (Diff. Amp.) Gain Stage (C E Amp.) Level Shifter Out Put Stage (Buffer)Pierana PolitaniNo ratings yet
- EE3950 Class Notes Chapter 14Document23 pagesEE3950 Class Notes Chapter 14Jkun gamingNo ratings yet
- 2020 IK OpAmpDocument26 pages2020 IK OpAmpAdi Kurniawan EffendiNo ratings yet
- Laboratory #2: Non-Ideal OP-AMP Characteristics: Task 1. Offset Voltages and CurrentsDocument2 pagesLaboratory #2: Non-Ideal OP-AMP Characteristics: Task 1. Offset Voltages and CurrentsMuhammad Raza RafiqNo ratings yet
- FALLSEM2019-20 EEE3002 ETH VL2019201001056 Reference Material I 12-Jul-2019 UNIT-2-op-amp ApplicationsDocument66 pagesFALLSEM2019-20 EEE3002 ETH VL2019201001056 Reference Material I 12-Jul-2019 UNIT-2-op-amp ApplicationsKumar RishabhNo ratings yet
- Chapter 6 Op AmpDocument14 pagesChapter 6 Op AmpAbdul RehmanNo ratings yet
- LAB 1 Op AmpDocument11 pagesLAB 1 Op AmpamirulNo ratings yet
- Chapter 2: Signal Conditioning: Measurement Systems With Electrical SignalsDocument20 pagesChapter 2: Signal Conditioning: Measurement Systems With Electrical SignalsKelkiyas TaurusNo ratings yet
- Ic NotesDocument67 pagesIc NotesVijaya Kumar VadladiNo ratings yet
- Circuits and Electronics Chapter 3 and NotesDocument49 pagesCircuits and Electronics Chapter 3 and NotesDr. S. DasNo ratings yet
- Opamp Circuits and Filters: ExperimentDocument11 pagesOpamp Circuits and Filters: ExperimentShashi PrabhuNo ratings yet
- 2.4 DC Characteristics of OpampDocument23 pages2.4 DC Characteristics of OpampMichael CampbellNo ratings yet
- Op Amp 2Document26 pagesOp Amp 2krishNo ratings yet
- PROJECT-LOON by JumiDocument35 pagesPROJECT-LOON by JuminathmanojNo ratings yet
- Lecture 4 - Operational AmplifiersDocument43 pagesLecture 4 - Operational Amplifiers葉士肇No ratings yet
- Lecture 2 PDFDocument22 pagesLecture 2 PDFJawad ChowdhuryNo ratings yet
- 073BEE Lab Sheet 4Document3 pages073BEE Lab Sheet 4Sagar UpretiNo ratings yet
- Op Amp Part 1Document37 pagesOp Amp Part 1MUHAMMAD KHAIRUL ANUAR BIN JUHARI A22EE0178No ratings yet
- Unit 5Document35 pagesUnit 5saicharankoppolu272No ratings yet
- Experiment 9Document6 pagesExperiment 9Abdullah ZubairNo ratings yet
- Lec 8 - Biomedical Amplifiers PDFDocument43 pagesLec 8 - Biomedical Amplifiers PDFSamama khanNo ratings yet
- 3.1 Summer and Instrumentation AmplifierDocument30 pages3.1 Summer and Instrumentation AmplifierNANDHAKUMAR ANo ratings yet
- Chapter Three Op-Amp Characteristics and Applications: + Non-Inverting OutputDocument17 pagesChapter Three Op-Amp Characteristics and Applications: + Non-Inverting OutputNimona HirphaNo ratings yet
- Physical Limitations of Op AmpsDocument18 pagesPhysical Limitations of Op AmpsFabricio AlvarezNo ratings yet
- OP-AMP SheetDocument14 pagesOP-AMP SheetAye Thein MaungNo ratings yet
- Experiment No 02Document4 pagesExperiment No 02noushadNo ratings yet
- Non InvertingDocument7 pagesNon InvertingVinay Yadav100% (1)
- Eee 1217 Op AmpDocument51 pagesEee 1217 Op AmpEbrahim SiddikNo ratings yet
- 386 Op AmpDocument2 pages386 Op AmphoobaholicNo ratings yet
- Chapter 5 Operational Amplifiers: Sung-Liang Chen VE215 Fall 2022Document68 pagesChapter 5 Operational Amplifiers: Sung-Liang Chen VE215 Fall 2022yi yang GuNo ratings yet
- LAB MANUAL ADSlatest PDFDocument62 pagesLAB MANUAL ADSlatest PDFP HAMSA DATTANo ratings yet
- Operational Amplifiers: Brandon Borm Shelley Nation Chloe MilionDocument33 pagesOperational Amplifiers: Brandon Borm Shelley Nation Chloe MilionrakibNo ratings yet
- ELE302 NotesDocument70 pagesELE302 NotesAnmol PanchalNo ratings yet
- Op-Amps 3Document5 pagesOp-Amps 3Alfred GaleaNo ratings yet
- Linear Applocations of OpAmpDocument73 pagesLinear Applocations of OpAmpinamkesoham5No ratings yet
- Electronic Instrumentation: Experiment 4Document63 pagesElectronic Instrumentation: Experiment 4helenarajNo ratings yet
- ECE131 UNIT5 Part3Document88 pagesECE131 UNIT5 Part3abhi shek100% (1)
- Tutorial 4 PDFDocument6 pagesTutorial 4 PDFAkshay RamrekhaNo ratings yet
- Operational Amplifiers: The Ideal Op-Amp in Negative FeedbackDocument4 pagesOperational Amplifiers: The Ideal Op-Amp in Negative FeedbackABCD ENo ratings yet
- Operational Amplifiers: David Lomax Azeem Meruani Gautam JadhavDocument28 pagesOperational Amplifiers: David Lomax Azeem Meruani Gautam JadhavSrijan ThakurNo ratings yet
- Math Chapter 1Document20 pagesMath Chapter 1Ovijit KarmokarNo ratings yet
- Lecture 01 - Op AmpsDocument14 pagesLecture 01 - Op AmpsOvijit KarmokarNo ratings yet
- Report Section: Report 01: Pspice Model of Triangular Wave GeneratorDocument1 pageReport Section: Report 01: Pspice Model of Triangular Wave GeneratorOvijit KarmokarNo ratings yet
- Data 6Document3 pagesData 6Ovijit KarmokarNo ratings yet
- Data 3Document2 pagesData 3Ovijit KarmokarNo ratings yet
- Diffraction NOTEDocument14 pagesDiffraction NOTEOvijit KarmokarNo ratings yet
- Diffraction MathDocument5 pagesDiffraction MathOvijit KarmokarNo ratings yet
- THERMOCHEMISTRYDocument3 pagesTHERMOCHEMISTRYOvijit KarmokarNo ratings yet
- Specical Theory of RelativityDocument9 pagesSpecical Theory of RelativityOvijit KarmokarNo ratings yet
- PolarizationoteDocument14 pagesPolarizationoteOvijit KarmokarNo ratings yet
- ColloidsDocument2 pagesColloidsOvijit KarmokarNo ratings yet
- Gauss-Divergence-Stokes TheoremDocument9 pagesGauss-Divergence-Stokes TheoremOvijit KarmokarNo ratings yet
- SolutionsDocument4 pagesSolutionsOvijit KarmokarNo ratings yet
- Design of A Low-Cost Contact-Less Digital - Like PDFDocument3 pagesDesign of A Low-Cost Contact-Less Digital - Like PDFMed MaxNo ratings yet
- Ds Atg 6000 Baur En-GbDocument2 pagesDs Atg 6000 Baur En-Gbrupesh kumarNo ratings yet
- Lembar Kerja Siswa MagnetDocument9 pagesLembar Kerja Siswa MagnetIca VianisyaNo ratings yet
- Hand Tool or Equipment: Power Strips/surge Protectors/RPT's Can Only Be Used For Low Power LoadDocument3 pagesHand Tool or Equipment: Power Strips/surge Protectors/RPT's Can Only Be Used For Low Power LoadEr Deep ShahNo ratings yet
- Coulmometric Methods: Presentation by Farlane Mtisi Fortune Donga Mansfield S.MutyandaDocument40 pagesCoulmometric Methods: Presentation by Farlane Mtisi Fortune Donga Mansfield S.MutyandaIrvinn NhutsNo ratings yet
- Data Sheet CD 8227 GPDocument8 pagesData Sheet CD 8227 GPRofo2015No ratings yet
- Assignment 7Document2 pagesAssignment 7Pavan KhetrapalNo ratings yet
- EC1402Document2 pagesEC1402engrkskNo ratings yet
- Compliance Options For UL 1446 BrochureDocument10 pagesCompliance Options For UL 1446 BrochureNeoZeruelNo ratings yet
- 01B Balun - Reflections 2nd Edition Chapter 21 - Some Aspects of The Balun Problem (By Walter Maxwell W2DU)Document15 pages01B Balun - Reflections 2nd Edition Chapter 21 - Some Aspects of The Balun Problem (By Walter Maxwell W2DU)Fernando Martin100% (1)
- Gas Draft of White PaperDocument3 pagesGas Draft of White Paperharshpatel18No ratings yet
- Field Testing Capacitor Bank With M4000 Test InstrumentDocument20 pagesField Testing Capacitor Bank With M4000 Test Instrumentupt vadodaraNo ratings yet
- EasyPact EZC - EZC250F3160Document6 pagesEasyPact EZC - EZC250F3160Ichsan RosidinNo ratings yet
- Siemens Loa24 171b27 ManualDocument10 pagesSiemens Loa24 171b27 ManualGildenor Roque NetoNo ratings yet
- ANT ADU451816v02 1885 Datasheet M1 - Re2Document4 pagesANT ADU451816v02 1885 Datasheet M1 - Re2Jimmy Alexander BallenNo ratings yet
- Umar 3 PractcialDocument3 pagesUmar 3 PractcialAbdullah ZubairNo ratings yet
- BRUTSCH - .... - High Voltage Insulation Failure Mechanisms - ARTICLEDocument4 pagesBRUTSCH - .... - High Voltage Insulation Failure Mechanisms - ARTICLEAlen PavlicaNo ratings yet
- Client - Consultant - Contractor - Project: Package-Ii: Doc. Name: Design Calculation Sheet For HT Power Cable Document No.Document2 pagesClient - Consultant - Contractor - Project: Package-Ii: Doc. Name: Design Calculation Sheet For HT Power Cable Document No.Pramod B.WankhadeNo ratings yet
- Littelfuse Power Semiconductor Ignition IGBT Devic-1224117Document10 pagesLittelfuse Power Semiconductor Ignition IGBT Devic-1224117ProbadorAutomotrizNo ratings yet
- EEE 462 Switch Gear and ProtectionDocument18 pagesEEE 462 Switch Gear and ProtectionEmdadul Hoq RakibNo ratings yet
- LM2596SDocument17 pagesLM2596SAhmed ShagidullinNo ratings yet
- Service Manual: HCD-DX50/RG80Document70 pagesService Manual: HCD-DX50/RG80cde269com100% (1)
- The Aerial-51 Model 807-L: A Multiband Antenna For HF and 6mDocument3 pagesThe Aerial-51 Model 807-L: A Multiband Antenna For HF and 6mIbeth CarbajalNo ratings yet
- BIOBASE BK-BTS1 User ManualDocument3 pagesBIOBASE BK-BTS1 User Manualsoporte03No ratings yet
- Physics Practical PromotionerDocument1 pagePhysics Practical PromotionersulayajannyNo ratings yet
- Activity 2.3.2 Seven-Segment Displays: Common Cathode Common AnodeDocument7 pagesActivity 2.3.2 Seven-Segment Displays: Common Cathode Common AnodescottNo ratings yet
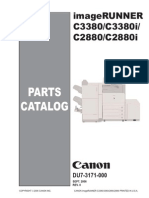
- CANON Color ImageRUNNER C2880, C2880i, C3380, C3380i Parts ListDocument150 pagesCANON Color ImageRUNNER C2880, C2880i, C3380, C3380i Parts Listchrisban35100% (1)