You might also like
- Neo PCM 11 p1 Phy e Laws of Motion 11 209Document107 pagesNeo PCM 11 p1 Phy e Laws of Motion 11 209aalulachalubetaNo ratings yet
- NEO - 12 - JEE - AC - P1 - PHY - H - Laws of Motion - S4 - 208Document109 pagesNEO - 12 - JEE - AC - P1 - PHY - H - Laws of Motion - S4 - 208Aditya SinghNo ratings yet
- Chapter2 4Document44 pagesChapter2 4Dinh Van TungNo ratings yet
- Laws of Motion. Byju'sDocument135 pagesLaws of Motion. Byju'sjimmyemandeeNo ratings yet
- Chapter 3-DynamicsDocument1 pageChapter 3-DynamicsantonstefanbiehlerNo ratings yet
- Laws of Motion Work, Energy and Power PDFDocument7 pagesLaws of Motion Work, Energy and Power PDFYash GuptaNo ratings yet
- Laws of Motion-1Document4 pagesLaws of Motion-1prachi98601No ratings yet
- Meriam E. MechDocument7 pagesMeriam E. MechAhana MondalNo ratings yet
- Introduction - Forces, Equilibrium: Chapter HighlightsDocument87 pagesIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalNo ratings yet
- Free Body DiagramDocument8 pagesFree Body Diagramabdullah hamba allahNo ratings yet
- Newton 'S Laws of Motion: Motion of A Car On Level ROAD (By Friction Only)Document1 pageNewton 'S Laws of Motion: Motion of A Car On Level ROAD (By Friction Only)rina85293No ratings yet
- Chapter 4-ForcesDocument1 pageChapter 4-ForcesantonstefanbiehlerNo ratings yet
- Statistics of Rigid BodiesDocument3 pagesStatistics of Rigid BodiesDave RubioNo ratings yet
- P6-Topic 1Document5 pagesP6-Topic 1Erianne ReyesNo ratings yet
- Laws of MotionDocument74 pagesLaws of MotionRaichal P BijuNo ratings yet
- Lesson 4.2 First Condition of EquilibriumDocument8 pagesLesson 4.2 First Condition of EquilibriumJulius Matthew MarananNo ratings yet
- Chapter 3 CompleteDocument38 pagesChapter 3 CompleteRameshNo ratings yet
- General Physics 1 (W4)Document7 pagesGeneral Physics 1 (W4)Kim SeungminNo ratings yet
- IntroductionDocument2 pagesIntroductionShawn MendesNo ratings yet
- Forces O LevelsDocument50 pagesForces O LevelsMuhammad Ali AbbasNo ratings yet
- Statics of Rigid Bodies IntorductionDocument4 pagesStatics of Rigid Bodies IntorductionMaria TheresaNo ratings yet
- NLM2 PjaDocument11 pagesNLM2 PjaShibi ShrivatsavNo ratings yet
- Force and Newton's Laws: Concise 2-Page Class 10 CBSE NotesDocument2 pagesForce and Newton's Laws: Concise 2-Page Class 10 CBSE Notesamaan 10 BNo ratings yet
- Principles of StaticsDocument11 pagesPrinciples of StaticsErnest Mae SabitNo ratings yet
- General Physics Ch2.2Document6 pagesGeneral Physics Ch2.2nahomNo ratings yet
- Chapter Two: Kinematics and Dynamics of ParticlesDocument129 pagesChapter Two: Kinematics and Dynamics of ParticlesEphrem ChernetNo ratings yet
- CDEP-Structural ReviewerDocument42 pagesCDEP-Structural ReviewerSalted EggNo ratings yet
- Physics Inertial ForceDocument7 pagesPhysics Inertial ForceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Learning Modules: Ee 2121: Engineering MechanicsDocument18 pagesLearning Modules: Ee 2121: Engineering MechanicsVINCE VITRIOLONo ratings yet
- What Is PhysicsDocument5 pagesWhat Is PhysicswatermelonNo ratings yet
- Phy and Eapp Semis ReviewerDocument6 pagesPhy and Eapp Semis ReviewerJOYNo ratings yet
- Newton'S Laws of Motion: Mark Anthony C. Burgonio, MSCDocument37 pagesNewton'S Laws of Motion: Mark Anthony C. Burgonio, MSCChristel GonzalesNo ratings yet
- Laws of Motion: Chapter - 00Document64 pagesLaws of Motion: Chapter - 00aatishsubash9b35832No ratings yet
- Summative 1 ReviewerDocument11 pagesSummative 1 ReviewerJuli BakerNo ratings yet
- General Physics PrefinalsDocument3 pagesGeneral Physics PrefinalssarmientojoonsunNo ratings yet
- Phys12 C02 Dynamics PrintDocument28 pagesPhys12 C02 Dynamics PrintSarah WangNo ratings yet
- Laws of MotionDocument4 pagesLaws of Motionnoli vergel kiritNo ratings yet
- 10physics2 2 PDFDocument6 pages10physics2 2 PDFSami NeriNo ratings yet
- 1 g11 Newtons LawsDocument32 pages1 g11 Newtons LawsAkira RamnathNo ratings yet
- Lect 1-MAD 231 InroductionDocument21 pagesLect 1-MAD 231 InroductionAlicemal DüzgünNo ratings yet
- Statics IntroductionDocument19 pagesStatics IntroductionNicoljen MangubatNo ratings yet
- Es11 - Statics of Rigid Bodies: Prepared By: Engr. Ruth Ann D Maningding 1Document16 pagesEs11 - Statics of Rigid Bodies: Prepared By: Engr. Ruth Ann D Maningding 1John Philip ParasNo ratings yet
- LESSON222 Ee 2Document3 pagesLESSON222 Ee 2pollypew333No ratings yet
- Physics Forces PDFDocument5 pagesPhysics Forces PDFObed Alonso LlagunoNo ratings yet
- Newton - S Laws of MotionDocument23 pagesNewton - S Laws of MotionAndrei AlidoNo ratings yet
- Lecture 1 Statics. Basic Concepts and AxiomsDocument38 pagesLecture 1 Statics. Basic Concepts and AxiomsДана Қарасайқызы100% (1)
- 4 Laws of MotionDocument15 pages4 Laws of MotionHimanshu Gupta100% (1)
- Adobe Scan 15-Dec-2022Document12 pagesAdobe Scan 15-Dec-2022zoro roronoaNo ratings yet
- Particle Interactions - FactRecallDocument2 pagesParticle Interactions - FactRecallHarpritNo ratings yet
- Laws of MotionDocument57 pagesLaws of MotionakinaasirNo ratings yet
- CH 1 - Girls Physics Solve ItDocument17 pagesCH 1 - Girls Physics Solve ItPdkNo ratings yet
- Engineering Mechanics - (Unit 01)Document76 pagesEngineering Mechanics - (Unit 01)Ansh GroverNo ratings yet
- Introduction & Free Body Diagrams: Luke Macdonald, Masc., P.Eng. Luke - Macdonald@Smu - CaDocument7 pagesIntroduction & Free Body Diagrams: Luke Macdonald, Masc., P.Eng. Luke - Macdonald@Smu - CaasifNo ratings yet
- Physics 2nd Shifting Concepts-2Document2 pagesPhysics 2nd Shifting Concepts-2BRIDGETTE KAYCEE CRUZNo ratings yet
- A. Newton's Laws of MotionDocument41 pagesA. Newton's Laws of MotionScredy GarciaNo ratings yet
- Static Equilibrium: Equilibrant ForceDocument8 pagesStatic Equilibrium: Equilibrant Forceحسين كاظم ياسينNo ratings yet
- Laws of MotionDocument22 pagesLaws of MotionDebayanbasu.juNo ratings yet
- Science 8 - 1st QuizDocument2 pagesScience 8 - 1st QuizRutchie LasqueNo ratings yet
- Lecture 1Document18 pagesLecture 1Adame, Shira Marie - BerondoNo ratings yet
- AIATS For First Step JEE (ADV) - Phase-3&4 Test-2A-P2 Code-H Sol 10-03-2024Document7 pagesAIATS For First Step JEE (ADV) - Phase-3&4 Test-2A-P2 Code-H Sol 10-03-2024sarthakyedlawar04No ratings yet
- P - Ch-28 - Communication SystemsDocument8 pagesP - Ch-28 - Communication Systemssarthakyedlawar04No ratings yet
- Chemical Bonding and Molecular StructureDocument1 pageChemical Bonding and Molecular Structuresarthakyedlawar04No ratings yet
- Oscillations MindmapDocument1 pageOscillations Mindmapsarthakyedlawar04No ratings yet
- Rotational MotionDocument1 pageRotational Motionsarthakyedlawar04No ratings yet
- Environmental Chemistry.Document1 pageEnvironmental Chemistry.sarthakyedlawar04No ratings yet
- Thermodynamics-1 MindmapDocument1 pageThermodynamics-1 Mindmapsarthakyedlawar04No ratings yet
- Alcohol, Phenol - EthersDocument1 pageAlcohol, Phenol - Etherssarthakyedlawar04No ratings yet
- Chemistry in Everyday LifeDocument1 pageChemistry in Everyday Lifesarthakyedlawar04No ratings yet
- EquilibriumDocument1 pageEquilibriumsarthakyedlawar04No ratings yet
- Section - E: Subjective Type: G V T GT VDocument32 pagesSection - E: Subjective Type: G V T GT Vsarthakyedlawar04No ratings yet
- Heirs of Vinluan Estate in Pangasinan Charged With Tax Evasion For Unsettled Inheritance Tax CaseDocument2 pagesHeirs of Vinluan Estate in Pangasinan Charged With Tax Evasion For Unsettled Inheritance Tax CaseAlvin Dela CruzNo ratings yet
- Ose Sample QuotationDocument37 pagesOse Sample Quotationrj medelNo ratings yet
- Annex To ED Decision 2013-015-RDocument18 pagesAnnex To ED Decision 2013-015-RBurse LeeNo ratings yet
- Controlled DemolitionDocument3 pagesControlled DemolitionJim FrancoNo ratings yet
- Individual Daily Log and Accomplishment Report: Date and Actual Time Logs Actual AccomplishmentsDocument3 pagesIndividual Daily Log and Accomplishment Report: Date and Actual Time Logs Actual AccomplishmentsMarian SalazarNo ratings yet
- Uh 60 ManualDocument241 pagesUh 60 ManualAnonymous ddjwf1dqpNo ratings yet
- Islamiyat ProjectDocument21 pagesIslamiyat ProjectSubhan Khan NiaziNo ratings yet
- Interbond 2340UPC: Universal Pipe CoatingDocument4 pagesInterbond 2340UPC: Universal Pipe Coatingnoto.sugiartoNo ratings yet
- Lakh Only) Being The Amount Covered Under The Aforesaid Dishonoured Cheque, and So AlsoDocument2 pagesLakh Only) Being The Amount Covered Under The Aforesaid Dishonoured Cheque, and So AlsoShivam MishraNo ratings yet
- Nse 2Document5 pagesNse 2dhaval gohelNo ratings yet
- Case No. Class Action Complaint Jury Trial DemandedDocument43 pagesCase No. Class Action Complaint Jury Trial DemandedPolygondotcom50% (2)
- Current Surgical Therapy 13th EditionDocument61 pagesCurrent Surgical Therapy 13th Editiongreg.vasquez490100% (41)
- Marieb ch3dDocument20 pagesMarieb ch3dapi-229554503No ratings yet
- Assignment RoadDocument14 pagesAssignment RoadEsya ImanNo ratings yet
- 2011-11-09 Diana and AtenaDocument8 pages2011-11-09 Diana and AtenareluNo ratings yet
- Evolis SDK Use Latest IomemDocument10 pagesEvolis SDK Use Latest IomempatrickNo ratings yet
- Ransomware: Prevention and Response ChecklistDocument5 pagesRansomware: Prevention and Response Checklistcapodelcapo100% (1)
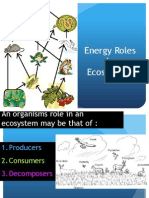
- Energy-Roles-In-Ecosystems-Notes-7 12bDocument10 pagesEnergy-Roles-In-Ecosystems-Notes-7 12bapi-218158367No ratings yet
- Rin Case StudyDocument4 pagesRin Case StudyReha Nayyar100% (1)
- A2 UNIT 5 Culture Teacher's NotesDocument1 pageA2 UNIT 5 Culture Teacher's NotesCarolinaNo ratings yet
- Sample Interview Questions For Planning EngineersDocument16 pagesSample Interview Questions For Planning EngineersPooja PawarNo ratings yet
- SKF Shaft Alignment Tool TKSA 41Document2 pagesSKF Shaft Alignment Tool TKSA 41Dwiki RamadhaniNo ratings yet
- What Are Some of The Best Books On Computer ScienceDocument9 pagesWhat Are Some of The Best Books On Computer ScienceSarthak ShahNo ratings yet
- Chunking Chunking Chunking: Stator Service IssuesDocument1 pageChunking Chunking Chunking: Stator Service IssuesGina Vanessa Quintero CruzNo ratings yet
- Jurnal Vol. IV No.1 JANUARI 2013 - SupanjiDocument11 pagesJurnal Vol. IV No.1 JANUARI 2013 - SupanjiIchsan SetiadiNo ratings yet
- A Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemsDocument10 pagesA Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemstarekeeeNo ratings yet
- Research Methods in Developmental PsychologyDocument9 pagesResearch Methods in Developmental PsychologyHugoNo ratings yet
- Digestive System Worksheet 2013 2Document3 pagesDigestive System Worksheet 2013 2contessa padonNo ratings yet
- IbmautomtiveDocument38 pagesIbmautomtiveMeltz NjorogeNo ratings yet
- Bathinda - Wikipedia, The Free EncyclopediaDocument4 pagesBathinda - Wikipedia, The Free EncyclopediaBhuwan GargNo ratings yet