You might also like
- PUMA Robot 070909Document11 pagesPUMA Robot 070909LaNo ratings yet
- BTL RobotDocument5 pagesBTL RobotManh Nguyen TienNo ratings yet
- BTL RobotDocument5 pagesBTL RobotManh Nguyen TienNo ratings yet
- Bai Tap Tinh Toan Dong Hoc Va Mo Phong RobotDocument10 pagesBai Tap Tinh Toan Dong Hoc Va Mo Phong Robotthinhduc1842002No ratings yet
- Tính toán quỹ đạo và mô phỏng cánh tay 5dof bằng MatlabDocument10 pagesTính toán quỹ đạo và mô phỏng cánh tay 5dof bằng MatlabJohn HNo ratings yet
- BT Chuong3-4Document14 pagesBT Chuong3-4thinhduc1842002No ratings yet
- Tính toán động lực họcDocument7 pagesTính toán động lực họcThành TrầnNo ratings yet
- De2 1Document5 pagesDe2 1lit voNo ratings yet
- PUMA StandartDocument13 pagesPUMA StandartthuonguongNo ratings yet
- Dong Hoc RobotDocument19 pagesDong Hoc Robotapi-3709462100% (3)
- Bài Tập Lớn Môn Kỹ Thuật RobotxccvccDocument23 pagesBài Tập Lớn Môn Kỹ Thuật RobotxccvccDuy KaKaNo ratings yet
- bt1 KTRBDocument3 pagesbt1 KTRBChien Nguyen Van KhanhNo ratings yet
- GK 121 Sol PDFDocument4 pagesGK 121 Sol PDFANH NGUYỄN TRẦN ĐOANNo ratings yet
- 2022.05.23 de Thi Mo Hinh Hoa 2022Document6 pages2022.05.23 de Thi Mo Hinh Hoa 2022kien.le2008No ratings yet
- Bài Tập KT Robot Chương 2Document6 pagesBài Tập KT Robot Chương 2Lê HoàngNo ratings yet
- Dong Hoc Nguoc RobotDocument9 pagesDong Hoc Nguoc Robothoanglongvnu43% (7)
- 1.2 - Bai Giang - Ma Tran Bac Thang-Hang - Dinh Thuc Cua Mot Ma TranDocument93 pages1.2 - Bai Giang - Ma Tran Bac Thang-Hang - Dinh Thuc Cua Mot Ma Tranduyenntm23401b1No ratings yet
- Bai Giang Dao Ham Toan 11 CTSTDocument94 pagesBai Giang Dao Ham Toan 11 CTSTJustin Achilles AlexandreNo ratings yet
- CSLTHH - Chương 5 - Động hoá họcDocument5 pagesCSLTHH - Chương 5 - Động hoá họcTín LêNo ratings yet
- Các thông số động học DenavitDocument3 pagesCác thông số động học DenavitTiến PhúNo ratings yet
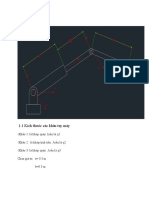
- FB luôn cùng phương Z, lực tạo torque N=0 Tại Toque tại K, lực tạo theo phương X = 0, giá trị cánh tay đòn=+y Tại torque M, lực tạo theo phương Y =0, giá trị cánh tay đòn=-xDocument1 pageFB luôn cùng phương Z, lực tạo torque N=0 Tại Toque tại K, lực tạo theo phương X = 0, giá trị cánh tay đòn=+y Tại torque M, lực tạo theo phương Y =0, giá trị cánh tay đòn=-xHuynh PyNNo ratings yet
- De Thi Cuoi Ky Robot CN DHCN Dong ADocument3 pagesDe Thi Cuoi Ky Robot CN DHCN Dong ATim NguyenNo ratings yet
- 1.RBCN CDT15 L1 (Truc)Document12 pages1.RBCN CDT15 L1 (Truc)Dương HiếuNo ratings yet
- GT3 Chuong3Document45 pagesGT3 Chuong3Nam TrọngNo ratings yet
- BT Nhóm 3.1Document9 pagesBT Nhóm 3.1Lê Thành ĐứcNo ratings yet
- Bài Tập 47 Làm Bằng Word-Lâm Phú Vinh-2105130017Document5 pagesBài Tập 47 Làm Bằng Word-Lâm Phú Vinh-2105130017Lâm Phú VinhNo ratings yet
- Nguyễn Quốc Vương 60CĐT1Document4 pagesNguyễn Quốc Vương 60CĐT15 GTANo ratings yet
- Bài Tập Chương 1 - Tổ 3Document6 pagesBài Tập Chương 1 - Tổ 3ngocle.31231022040No ratings yet
- De On Giua Ky Robot CNDocument5 pagesDe On Giua Ky Robot CNunlockvnNo ratings yet
- Bài Tập-Biến Đổi LaplaceDocument9 pagesBài Tập-Biến Đổi LaplaceKhôi Nguyễn BảoNo ratings yet
- Phunghuuhoanh 20184463Document6 pagesPhunghuuhoanh 20184463Hoành PhùngNo ratings yet
- 1.RBCN CDT15 L1 (Truc)Document12 pages1.RBCN CDT15 L1 (Truc)unlockvnNo ratings yet
- BÀI TẬP LỚN MÔN LÝ THUYẾT MẠCH 1Document8 pagesBÀI TẬP LỚN MÔN LÝ THUYẾT MẠCH 1Van Tung HaNo ratings yet
- 18-Ph M H NG Khánh-1851201888-60CĐT2Document14 pages18-Ph M H NG Khánh-1851201888-60CĐT2Anh TrầnNo ratings yet
- Bai Giai Dieu Khien Thich NghiDocument4 pagesBai Giai Dieu Khien Thich Nghinguyễn ngọc ánhNo ratings yet
- Robot Yaskawa EP4000DDocument6 pagesRobot Yaskawa EP4000DLặng LẽNo ratings yet
- BÁO CÁO THÍ NGHIỆM HÓA ĐẠI CƯƠNGDocument16 pagesBÁO CÁO THÍ NGHIỆM HÓA ĐẠI CƯƠNGThảo Võ Nguyễn ĐoanNo ratings yet
- BTC2Document3 pagesBTC2CHIẾN NGUYỄN ĐỨCNo ratings yet
- 21Nh14 102210262 LamNhatMinh LabDHMT05Document7 pages21Nh14 102210262 LamNhatMinh LabDHMT05Nhật Minh LâmNo ratings yet
- TOÁN CAO CẤPDocument8 pagesTOÁN CAO CẤPNgân Nguyễn Thị KimNo ratings yet
- Đáp Án BT c2 SBT Toán Kt1Document9 pagesĐáp Án BT c2 SBT Toán Kt1kimanhla.cvNo ratings yet
- Nguyen Cong NgocDocument5 pagesNguyen Cong Ngoc5 GTANo ratings yet
- Đồ-án2Document37 pagesĐồ-án2An DoNo ratings yet
- SửaDocument4 pagesSửa22021530No ratings yet
- NguyenHoangMinh 1914165 BT2Document5 pagesNguyenHoangMinh 1914165 BT2minh nguyenNo ratings yet
- cuaccaccacDocument5 pagescuaccaccacKiên PhạmNo ratings yet
- TƯỜNG TRÌNH THÍ NGHIỆM HÓA LÝbài 4 2Document5 pagesTƯỜNG TRÌNH THÍ NGHIỆM HÓA LÝbài 4 2khanh0% (1)
- LA UET Winter2022 1B-1Document5 pagesLA UET Winter2022 1B-1kieuquyvpNo ratings yet
- MinhDocument30 pagesMinhNguyễn Hùng MinhNo ratings yet
- Chuong 7 Thiet Ke Quy DaoDocument14 pagesChuong 7 Thiet Ke Quy DaoLy Nguyễn HươngNo ratings yet
- 21Nh14 102210262 LamNhatMinh LabDHMT03Document7 pages21Nh14 102210262 LamNhatMinh LabDHMT03Nhật Minh LâmNo ratings yet
- Buoi 04 - Ngay 13-03-2024 - mon Cau truc roi rac - lop MA004.O210Document12 pagesBuoi 04 - Ngay 13-03-2024 - mon Cau truc roi rac - lop MA004.O210Trang Nguyễn Thị ThùyNo ratings yet
- Tailieuxanh Matlab Trong Dieu Khien Tu Dong 211Document30 pagesTailieuxanh Matlab Trong Dieu Khien Tu Dong 211HAHAHA JKNo ratings yet
- Kinematics Indy7Document5 pagesKinematics Indy7truong.lenhut2k2No ratings yet
- 5BT VLDC - Dao Dong Va Song CoDocument9 pages5BT VLDC - Dao Dong Va Song CokenhcolourreviewNo ratings yet
- Buoi 04 - Ngay 23-03-2023 - Mon Cau Truc Roi Rac - MA004.N213Document12 pagesBuoi 04 - Ngay 23-03-2023 - Mon Cau Truc Roi Rac - MA004.N213Nguyễn Võ Đại DươngNo ratings yet
- (01) Phúc trình 1. Nhiệt hòa tan Natri tetra BoraxDocument3 pages(01) Phúc trình 1. Nhiệt hòa tan Natri tetra BoraxLe Thanh Phu B1909716No ratings yet
- Báo Cáo Project Điều Khiển SốDocument20 pagesBáo Cáo Project Điều Khiển SốĐức Mạnh NgôNo ratings yet
- Nguyễn Quốc Hiển 20TDHCLC4 105200490Document9 pagesNguyễn Quốc Hiển 20TDHCLC4 105200490Đức Mạnh NgôNo ratings yet
- Robot - Chuong 6 - HD Mo Phong SCARA 5DOFDocument131 pagesRobot - Chuong 6 - HD Mo Phong SCARA 5DOFtoeictoeic37No ratings yet
- Robot - Chuong 3 - 2022Document105 pagesRobot - Chuong 3 - 2022Huỳnh NguyễnNo ratings yet
- Robot - Chuong 4Document28 pagesRobot - Chuong 4toeictoeic37No ratings yet