You might also like
- SV - Chuoi FourierDocument18 pagesSV - Chuoi FourierHiếu Lê TrungNo ratings yet
- giải bài tập về nhà HHVPDocument4 pagesgiải bài tập về nhà HHVPVũ HiềnNo ratings yet
- Chương III Biến Đổi LaplaceDocument27 pagesChương III Biến Đổi LaplaceĐạt HuỳnhNo ratings yet
- Đồ án Thiết kế hệ thống cơ điện tử Thiết kế robot SCARA vận chuyển sản phẩm Mã học phần: ME5512Document37 pagesĐồ án Thiết kế hệ thống cơ điện tử Thiết kế robot SCARA vận chuyển sản phẩm Mã học phần: ME5512An DoNo ratings yet
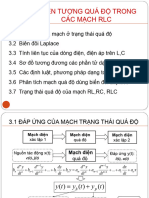
- CHƯƠNG 2 Phân Tích Mạch Điện Trong Miền Tần SốDocument132 pagesCHƯƠNG 2 Phân Tích Mạch Điện Trong Miền Tần SốBÙI VĂN KIÊNNo ratings yet
- Bài giảng LTDK PDFDocument161 pagesBài giảng LTDK PDFphuong tranNo ratings yet
- On Tap Cuoi Ky TKTDocument6 pagesOn Tap Cuoi Ky TKTCà ChuaNo ratings yet
- Inbdoi LaplaceDocument22 pagesInbdoi LaplacePhước HàNo ratings yet
- Ky Thuat Xung - Bai Tap PDFDocument18 pagesKy Thuat Xung - Bai Tap PDFVo Dinh VuNo ratings yet
- Cau Hoi On TapDocument19 pagesCau Hoi On Taptu nguyenNo ratings yet
- ÔN TẬP THHTDocument140 pagesÔN TẬP THHTĐạt HuỳnhNo ratings yet
- Bang Cong Thuc Bien Doi Tin Hieu PDFDocument1 pageBang Cong Thuc Bien Doi Tin Hieu PDFThanh ThùyNo ratings yet
- CHNG 4 QHQD Trajectory PlanningDocument34 pagesCHNG 4 QHQD Trajectory PlanningDự ĐinhNo ratings yet
- Đề Cương Ôn Tập Toán Kỹ ThuậtDocument12 pagesĐề Cương Ôn Tập Toán Kỹ ThuậtLong HoangNo ratings yet
- tín hiệu và hệ thốngDocument2 pagestín hiệu và hệ thốngHuy Iron100% (1)
- Dap An Quiz2 L04Document4 pagesDap An Quiz2 L04thanh.nguyenhthanh0478No ratings yet
- CK 141Document2 pagesCK 141Phạm Đăng BảoNo ratings yet
- Bai 3 FMDocument6 pagesBai 3 FMDương HoàngNo ratings yet
- Dap An BT Bai 1Document14 pagesDap An BT Bai 1Clone TongNo ratings yet
- CK 132Document2 pagesCK 132Phạm Đăng BảoNo ratings yet
- Chuong 4 Dong Hoc NguocDocument39 pagesChuong 4 Dong Hoc NguocMaianh TranNo ratings yet
- Midterm s1 19 20Document2 pagesMidterm s1 19 20Trần Phú QuíNo ratings yet
- Bai Giang HT Servo - Chuong 2Document69 pagesBai Giang HT Servo - Chuong 2Luyện TrầnNo ratings yet
- Trường Đại học Bách khoa tp Hồ Chí Minh Bộ môn Toán ứng dụngDocument10 pagesTrường Đại học Bách khoa tp Hồ Chí Minh Bộ môn Toán ứng dụngChung VuNo ratings yet
- khai triển fourierDocument31 pageskhai triển fourierpham nhat minhNo ratings yet
- Thiết kế mô hình điều khiển mobile robot bám mục tiêu áp dụng bộ điều khiển mờ - nơron thích nghi - 1214146Document4 pagesThiết kế mô hình điều khiển mobile robot bám mục tiêu áp dụng bộ điều khiển mờ - nơron thích nghi - 1214146Trọng Nguyễn BáNo ratings yet
- C3 LTTHDocument36 pagesC3 LTTHTài Huỳnh VănNo ratings yet
- HW4 - Unit Step (2021.03)Document2 pagesHW4 - Unit Step (2021.03)Trung Võ Lê MinhNo ratings yet
- Chương 6. Chuỗi Fourier và phép biến đổi FourierDocument23 pagesChương 6. Chuỗi Fourier và phép biến đổi Fouriertien hoNo ratings yet
- Chương 3 - Một Số Quy Luật PPXSDocument71 pagesChương 3 - Một Số Quy Luật PPXSHuỳnh Nhật HuyNo ratings yet
- Xử Lý Số Tín Hiệu: Digital Signal ProcessingDocument76 pagesXử Lý Số Tín Hiệu: Digital Signal Processingminhnghia6903No ratings yet
- Chuong 4 - DSPDocument74 pagesChuong 4 - DSPTài Huỳnh VănNo ratings yet
- Bai Giang DKTD - Chuong 2Document87 pagesBai Giang DKTD - Chuong 2Trung Võ Lê MinhNo ratings yet
- Pages From Toan 12 - SGK CÙNG KHÁM KHÁ - Tap 2Document2 pagesPages From Toan 12 - SGK CÙNG KHÁM KHÁ - Tap 2baog18361No ratings yet
- Chap 3Document50 pagesChap 3Nam LưuNo ratings yet
- BaiGiang 6 2024Document47 pagesBaiGiang 6 2024Nguyễn Lê Hoàng PhúcNo ratings yet
- 1.RBCN CDT15 L1 (Truc)Document12 pages1.RBCN CDT15 L1 (Truc)unlockvnNo ratings yet
- Dap - An - KTGK - HK232 - THHT (HCMUT)Document5 pagesDap - An - KTGK - HK232 - THHT (HCMUT)Trần Đình ThưởngNo ratings yet
- Chapter 02 Mo Phong He ThongDocument57 pagesChapter 02 Mo Phong He ThongPhan Chí BảoNo ratings yet
- Homework DRT NVD 2,3Document116 pagesHomework DRT NVD 2,3Vĩnh- B19DCVT442 Nguyễn VănNo ratings yet
- De Thi DKTU HK1 2021 DapanDocument3 pagesDe Thi DKTU HK1 2021 DapanChuong Nguyen MinhNo ratings yet
- 1.RBCN CDT15 L1 (Truc)Document12 pages1.RBCN CDT15 L1 (Truc)Dương HiếuNo ratings yet
- Chuong 3Document35 pagesChuong 3thuongtran20199No ratings yet
- Bài 01Document4 pagesBài 01Nailah BìnhNo ratings yet
- Dap An de On Thi HSG So 5Document9 pagesDap An de On Thi HSG So 5Phạm KiệtNo ratings yet
- HamPhuc 04 TichphanhamphucDocument48 pagesHamPhuc 04 TichphanhamphucGo SarNo ratings yet
- Preview PDFDocument4 pagesPreview PDFmaikhanhhuyen0106No ratings yet
- Ap An Ngay 1Document7 pagesAp An Ngay 1Khương BảoNo ratings yet
- Tin-Hieu-Va-He-Thong - Do-Thi-Tu-Anh - De-Thi-20102 - (Cuuduongthancong - Com)Document4 pagesTin-Hieu-Va-He-Thong - Do-Thi-Tu-Anh - De-Thi-20102 - (Cuuduongthancong - Com)D.Holmes LeonardNo ratings yet
- THHT C2 P3 SVDocument57 pagesTHHT C2 P3 SVNguyen Ho Nam NamNo ratings yet
- Bài 1 - Lý IDocument36 pagesBài 1 - Lý IĐăng DươngNo ratings yet
- EMA2036E Kinematic 2021Document103 pagesEMA2036E Kinematic 2021Đức Trí NguyễnNo ratings yet
- Bài Tập Chương 10 -2020Document5 pagesBài Tập Chương 10 -2020Brian RichardNo ratings yet
- 04 - Chuong 4 - Mien Tan So - P2 - Ly ThuyetDocument14 pages04 - Chuong 4 - Mien Tan So - P2 - Ly ThuyetNguyen Hong QuangNo ratings yet
- CH 1 - Phan Tich Mach Dien Trong Mien Thoi GianDocument72 pagesCH 1 - Phan Tich Mach Dien Trong Mien Thoi Gian21. Võ Trần Tuyết NhiNo ratings yet
- 11 NgoQuiDuongDocument9 pages11 NgoQuiDuong5 GTANo ratings yet
- Dap An - Dethi - CSTD - GK1 - 1314Document7 pagesDap An - Dethi - CSTD - GK1 - 1314buithikiemlien12c2No ratings yet
- Xu-Ly-Tin-Hieu-So - Le-Tien-Thuong - Chuong-1 - BT - (Cuuduongthancong - Com)Document9 pagesXu-Ly-Tin-Hieu-So - Le-Tien-Thuong - Chuong-1 - BT - (Cuuduongthancong - Com)DUY Nguyễn NhậtNo ratings yet
- 3 Baitap Tonghop PDFDocument3 pages3 Baitap Tonghop PDFTô Minh ĐạtNo ratings yet