You might also like
- Ancient Skies of Northern Europe: Stars, Constellations, and The Moon in Nordic MythologyDocument12 pagesAncient Skies of Northern Europe: Stars, Constellations, and The Moon in Nordic MythologyoldenglishblogNo ratings yet
- Mos Merged PDFDocument433 pagesMos Merged PDFBOOMERaNG boomNo ratings yet
- Free Body Diagrams - Essential PhysicsDocument37 pagesFree Body Diagrams - Essential PhysicsHendra du NantNo ratings yet
- PAMDocument14 pagesPAMRashed IslamNo ratings yet
- Mary Szybist On Visual Poetry Compressed PDFDocument5 pagesMary Szybist On Visual Poetry Compressed PDFcarlos.enrique.fonseca1440No ratings yet
- Basic SCBA: Self-Contained Breathing ApparatusDocument51 pagesBasic SCBA: Self-Contained Breathing ApparatusPaoloFregonaraNo ratings yet
- Heat Shrink CoatingDocument5 pagesHeat Shrink CoatingMekhmanNo ratings yet
- Understanding Blow Molding: Norman C. LeeDocument11 pagesUnderstanding Blow Molding: Norman C. LeeKiran ModakNo ratings yet
- Modified Atmosphere Packaging AssignmentDocument22 pagesModified Atmosphere Packaging AssignmentSanjhai PrakashNo ratings yet
- Stat For Rigid BodiesDocument7 pagesStat For Rigid BodiesKean LonggayNo ratings yet
- L0-T1 MOS - With SolutionsDocument66 pagesL0-T1 MOS - With SolutionsparmodrtkNo ratings yet
- Basic Biomechanics: Chaitali PrabhudesaiDocument43 pagesBasic Biomechanics: Chaitali PrabhudesaiSharth SharanNo ratings yet
- Mechanics Introduction LectureDocument11 pagesMechanics Introduction LectureDr.Risalah A MohammedNo ratings yet
- Chapter-3: Force Acting On Particles and Rigid BodyDocument22 pagesChapter-3: Force Acting On Particles and Rigid BodySamyog AcharyaNo ratings yet
- Shyam Bihari Lal Engineering Mechanics Notes: 1. Resultant of A Force SystemDocument6 pagesShyam Bihari Lal Engineering Mechanics Notes: 1. Resultant of A Force Systemlatendra kumar srivastavNo ratings yet
- Engineering Mechanics 41Document22 pagesEngineering Mechanics 41Sumit GhartimagarNo ratings yet
- Formula Book Mechanical Engineering 94Document452 pagesFormula Book Mechanical Engineering 94ferato8799No ratings yet
- Mos Learning Material 2019Document50 pagesMos Learning Material 2019Rayan KhanNo ratings yet
- Resultant of Forces SystemDocument14 pagesResultant of Forces SystemStephen ByaruhangaNo ratings yet
- Moment of A ForceDocument4 pagesMoment of A ForceReeseNo ratings yet
- Session 1: Resultant of Force System: CouplesDocument4 pagesSession 1: Resultant of Force System: CouplesRhodoralyn Ilagan BalhagNo ratings yet
- SRB Session1 RofsDocument4 pagesSRB Session1 RofsFullo Flores MarviloneNo ratings yet
- Statics, Topics 1,2,3Document98 pagesStatics, Topics 1,2,3Sam LoveNo ratings yet
- System of ForcesDocument23 pagesSystem of ForcesRISHIK GUPTANo ratings yet
- Analysis of Rigid Bodies in EquilibriumDocument9 pagesAnalysis of Rigid Bodies in Equilibriumrevathi JNo ratings yet
- STATICS OF RIGID BODIES GuideDocument7 pagesSTATICS OF RIGID BODIES GuideMichael Angelo MontebonNo ratings yet
- Lecture Notes 2 - Introduction To Statics of Rigid BodiesDocument3 pagesLecture Notes 2 - Introduction To Statics of Rigid BodiesMark Recar AntequisaNo ratings yet
- CIE PhysicsDocument14 pagesCIE PhysicsengrroyNo ratings yet
- Engineering Mechanics - Lecture Note 1Document33 pagesEngineering Mechanics - Lecture Note 1Tanu RdNo ratings yet
- Engineering Science: StaticsDocument52 pagesEngineering Science: StaticsDRAGON LAMNo ratings yet
- Dato OnnDocument3 pagesDato OnnlucasNo ratings yet
- Created by C. Mani, Assistant Commissioner, KVS RO SilcharDocument39 pagesCreated by C. Mani, Assistant Commissioner, KVS RO SilcharvipinNo ratings yet
- Engineering Mechanics NotesDocument25 pagesEngineering Mechanics NotesSameer Sawarkar100% (1)
- Statics of Rigid Bodies GuideDocument7 pagesStatics of Rigid Bodies GuideZerah AndradeNo ratings yet
- 0J2Lecture Notes 5 StaticsDocument13 pages0J2Lecture Notes 5 StaticsTamuka KudakwasheNo ratings yet
- EquilibriumDocument40 pagesEquilibriumJeremy MacalaladNo ratings yet
- PHYSICS 149: Lecture 5: - Chapter 2Document28 pagesPHYSICS 149: Lecture 5: - Chapter 2Sourav PandaNo ratings yet
- Laws of MotionDocument26 pagesLaws of Motionaslamfiza06No ratings yet
- Experiment No 5: ObjectiveDocument4 pagesExperiment No 5: ObjectiveAhmed ImranNo ratings yet
- NTPS Mechanics and Mathematics ReviewDocument66 pagesNTPS Mechanics and Mathematics Reviewshuki456No ratings yet
- Sci8 - Q1 - Wk1 - LAS Day2Document2 pagesSci8 - Q1 - Wk1 - LAS Day2Ledor NapadlabNo ratings yet
- Session - 1 - Force Systems and EquilibriumDocument30 pagesSession - 1 - Force Systems and EquilibriumLuc AusterNo ratings yet
- Engineers Mechanics-Equilibrium of Rigid BodiesDocument16 pagesEngineers Mechanics-Equilibrium of Rigid BodiesMayur MistryNo ratings yet
- Equilibrium of A Rigid BodyDocument55 pagesEquilibrium of A Rigid BodyGregNo ratings yet
- 1 - Statics PDFDocument15 pages1 - Statics PDFAmin PiNo ratings yet
- Lab Report On Static EquilibriumDocument5 pagesLab Report On Static EquilibriumSamuel Ogeda OtienoNo ratings yet
- Note Chapter5 SF017Document50 pagesNote Chapter5 SF017api-3699866100% (3)
- Equilibrium: This Module Aims That The Students Will Be Able ToDocument12 pagesEquilibrium: This Module Aims That The Students Will Be Able ToMonique UnicoNo ratings yet
- Chapter 1Document121 pagesChapter 1f_manyalNo ratings yet
- Rigid Body EquilibriumDocument9 pagesRigid Body EquilibriumrislaepiNo ratings yet
- Malawi University of Science and Technology (Must) : UNIT-1: Force SystemsDocument27 pagesMalawi University of Science and Technology (Must) : UNIT-1: Force SystemsChristella MacumiNo ratings yet
- Lecture03 Force Stress 2023Document33 pagesLecture03 Force Stress 2023Nastassja BiccardNo ratings yet
- Equilibrium of Rigid BodyDocument45 pagesEquilibrium of Rigid BodyHawaiiChongNo ratings yet
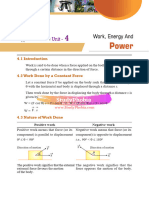
- Positive Work Negative Work: Work, Energy and PowerDocument38 pagesPositive Work Negative Work: Work, Energy and Powerpraveen.aicpNo ratings yet
- Forces and The Laws of Motion: G9-AthsDocument25 pagesForces and The Laws of Motion: G9-AthsSalma 7assanNo ratings yet
- Lecture - Week2 (LMS Sept2022)Document52 pagesLecture - Week2 (LMS Sept2022)2200851No ratings yet
- MOS1 NotesDocument20 pagesMOS1 NotesShaik Humer SadikhNo ratings yet
- Newton's Second Law of MotionDocument19 pagesNewton's Second Law of MotionPauling ChiaNo ratings yet
- Chapter One 1:1 Definitions: P P F FDocument47 pagesChapter One 1:1 Definitions: P P F FMohammad AbboudNo ratings yet
- Applied Mechanics Chapter 3: Moment: Government Polytechnic LucknowDocument24 pagesApplied Mechanics Chapter 3: Moment: Government Polytechnic LucknowTushar KiranNo ratings yet
- Moment of Force About A PointDocument21 pagesMoment of Force About A PointPrashant SinghNo ratings yet
- Strength of Materials: Pamantasan NG Lungsod NG MaynilaDocument13 pagesStrength of Materials: Pamantasan NG Lungsod NG MaynilaabercrombieNo ratings yet
- Topic 3 - ForceDocument14 pagesTopic 3 - Forceche syakirNo ratings yet
- Chapter Four Class 9thDocument11 pagesChapter Four Class 9thAliNo ratings yet
- 06 121 Lab6 Centripetal F2016Document7 pages06 121 Lab6 Centripetal F2016Tejendra B.C.No ratings yet
- L5-Soil MechanicsDocument15 pagesL5-Soil MechanicsRaj YdvNo ratings yet
- L1-Soil MechanicsDocument19 pagesL1-Soil MechanicsRaj YdvNo ratings yet
- L3-Soil MechanicsDocument9 pagesL3-Soil MechanicsRaj YdvNo ratings yet
- L4-Soil MechanicsDocument16 pagesL4-Soil MechanicsRaj YdvNo ratings yet
- L2-Soil MechanicsDocument10 pagesL2-Soil MechanicsRaj YdvNo ratings yet
- ESO 202 Mechanics of Solid L-4Document22 pagesESO 202 Mechanics of Solid L-4Raj YdvNo ratings yet
- Sa 387Document6 pagesSa 387ismaelarchilacastilloNo ratings yet
- Bastidas Et Al, 2010Document8 pagesBastidas Et Al, 2010Panji Satria N.No ratings yet
- BB204-Toddler Bed Assembly InstructionsDocument10 pagesBB204-Toddler Bed Assembly InstructionsCaloi PastorfideNo ratings yet
- Extravagant - Bethel Music CHORDS PDFDocument2 pagesExtravagant - Bethel Music CHORDS PDFKamila Joseph Hernandez VanegasNo ratings yet
- F5 BIG IP LTM 301A 301B Key Notes Feb 2023 1677506622Document63 pagesF5 BIG IP LTM 301A 301B Key Notes Feb 2023 1677506622MuhammadAbidHameedNo ratings yet
- IM300-20 (LCMass RHE 14) PDFDocument40 pagesIM300-20 (LCMass RHE 14) PDFLazzarus Az GunawanNo ratings yet
- BCA 5005 Minor Project Synopsis Format & GuidelinesDocument7 pagesBCA 5005 Minor Project Synopsis Format & GuidelinesAnu VermaNo ratings yet
- Spesifikasi Vista 120 S Patient Monitor - StandardDocument2 pagesSpesifikasi Vista 120 S Patient Monitor - StandardHadi AtmojoNo ratings yet
- Poisson, Poisson-Gamma and Zero-Inflated Regression ModelsDocument43 pagesPoisson, Poisson-Gamma and Zero-Inflated Regression ModelszohrehNo ratings yet
- Investigation Gr. 8Document6 pagesInvestigation Gr. 8Marthie van zylNo ratings yet
- Optoelectronics Circuit CollectionDocument18 pagesOptoelectronics Circuit CollectionSergiu CristianNo ratings yet
- Ecs C42iix Rev C Vit m2400 1Document36 pagesEcs C42iix Rev C Vit m2400 1Victor Pic100% (1)
- A Novel Wastewater Derived BiodieselDocument13 pagesA Novel Wastewater Derived BiodieselYuri ClaroNo ratings yet
- Electromagnetic Boundary ConditionDocument7 pagesElectromagnetic Boundary ConditionravindarsinghNo ratings yet
- Mono and DicotDocument3 pagesMono and Dicotlady chaseNo ratings yet
- ETP Combined Spec - R0Document60 pagesETP Combined Spec - R0Pravash Chandra Senapaty100% (1)
- Thin Film DepositionDocument34 pagesThin Film Depositionsenthil100% (2)
- Fra Assignment 1Document11 pagesFra Assignment 1Ruchi SambhariaNo ratings yet
- Mechanics of Solids - (Riveted and Welded Joints)Document37 pagesMechanics of Solids - (Riveted and Welded Joints)TusherNo ratings yet
- Tecnical Data TYPE 139 L12R / L16RDocument1 pageTecnical Data TYPE 139 L12R / L16RLada LabusNo ratings yet
- CW9 Identifying Functions 5Document2 pagesCW9 Identifying Functions 5Xavier BurrusNo ratings yet
- Matter 1A Forms Properties and ChangesDocument47 pagesMatter 1A Forms Properties and ChangesSamKris Guerrero Malasaga100% (2)
- Smart Energy Meter and Monitoring System Using Iot IJERTCONV8IS14011Document4 pagesSmart Energy Meter and Monitoring System Using Iot IJERTCONV8IS14011Gurpreet SinghNo ratings yet