You might also like
- HYUNDAI Escavadeira PDFDocument227 pagesHYUNDAI Escavadeira PDFBer Honza94% (32)
- Cj1 Flight Planning ManualDocument32 pagesCj1 Flight Planning Manualjosecr198080% (5)
- Fred David - Strategic Management - A Competitive Advantage Approach, Concepts and Cases (Team-IRA) - Pearson (2023)Document681 pagesFred David - Strategic Management - A Competitive Advantage Approach, Concepts and Cases (Team-IRA) - Pearson (2023)Soad Daawoh100% (4)
- Transcription Hub TestDocument3 pagesTranscription Hub TestMonaliza SequigNo ratings yet
- Mathematics Form 1 Chapter 1-5 PDFDocument50 pagesMathematics Form 1 Chapter 1-5 PDFAinul Syahirah Omar84% (19)
- Kubota Produktinfo U50 3 AlphaDocument46 pagesKubota Produktinfo U50 3 Alphatrina100% (1)
- Factsheets - ATR 72-600Document2 pagesFactsheets - ATR 72-600Ethan NovleNo ratings yet
- DFP 10K 13K ATFL Specalog PDFDocument4 pagesDFP 10K 13K ATFL Specalog PDFFedi KleiNo ratings yet
- Short Range UavDocument40 pagesShort Range UavthiyagusaraNo ratings yet
- Manual GruaDocument14 pagesManual Gruaantuan551No ratings yet
- Hitachi TrainingmanualDocument139 pagesHitachi TrainingmanualPrudz92% (12)
- Principles of Sales Lakshmi Projects Case Study Sales Structure Dilemma CaseDocument7 pagesPrinciples of Sales Lakshmi Projects Case Study Sales Structure Dilemma Caserio boseNo ratings yet
- CH 2 FiguresDocument9 pagesCH 2 FiguresamroushararaNo ratings yet
- Uav MaleDocument37 pagesUav Malearavind3kannan100% (1)
- Cessna Model 700 FPG PDFDocument32 pagesCessna Model 700 FPG PDFNobodyHere100% (1)
- ADP Project 1Document32 pagesADP Project 1KishoremcNo ratings yet
- Ase 446 Intr. To Helicopter Aerodyn. and Design Final RepotDocument11 pagesAse 446 Intr. To Helicopter Aerodyn. and Design Final RepotSubayyal IlyasNo ratings yet
- Aluw04d EngineDocument6 pagesAluw04d EngineDhaval Waghela100% (1)
- d7r II Vs D85ex-15 Perf Report (Texr0406)Document6 pagesd7r II Vs D85ex-15 Perf Report (Texr0406)firman manaluNo ratings yet
- CJ2+ - FPGDocument32 pagesCJ2+ - FPGR SNo ratings yet
- India Surface To Surface MissilesDocument20 pagesIndia Surface To Surface MissilesSenthil Kumar100% (1)
- Let L410Document6 pagesLet L410jarinariadNo ratings yet
- The GE90 - An IntroductionDocument18 pagesThe GE90 - An IntroductionOsman ParlakNo ratings yet
- The GE90 - An IntroductionDocument18 pagesThe GE90 - An IntroductionIshan KakadNo ratings yet
- D6T EngDocument12 pagesD6T EngelizabeththeresanaomNo ratings yet
- Excavator MasterDocument279 pagesExcavator MasterMartin FloresNo ratings yet
- Flight Planning Guide: Citation MustangDocument32 pagesFlight Planning Guide: Citation MustangDumitru Enin100% (1)
- AdpDocument37 pagesAdpGagan chahalNo ratings yet
- Power LineDocument19 pagesPower LineSLAMET WAHYUDINo ratings yet
- European Aviation Safety Agency: Easa Type-Certificate Data SheetDocument10 pagesEuropean Aviation Safety Agency: Easa Type-Certificate Data SheetPeter SengeNo ratings yet
- Perf Rep D155a5Document8 pagesPerf Rep D155a5SandyNo ratings yet
- A380 ReferenceDocument12 pagesA380 Referencesubha_aeroNo ratings yet
- Ection Perating Pecifications: Revision November 2009Document18 pagesEction Perating Pecifications: Revision November 2009Anibal Jose Cruz LarezNo ratings yet
- Kitfox2 Owners ManualDocument19 pagesKitfox2 Owners ManualNofriagara Davit HarnawanNo ratings yet
- 39e13ldx Fan Performance400af PDFDocument1 page39e13ldx Fan Performance400af PDFAbi PascuaNo ratings yet
- Teknik Perkapalan FTUI: Kapal PembandingDocument636 pagesTeknik Perkapalan FTUI: Kapal PembandingRaja Fatah Satrio AbimanyuNo ratings yet
- 259B Series 3: Ompact Rack OaderDocument2 pages259B Series 3: Ompact Rack OaderjunilokoNo ratings yet
- Joint Heavy Lift (JHL) - JSF Lift Fan DerivativeDocument43 pagesJoint Heavy Lift (JHL) - JSF Lift Fan Derivativeflateric74@yandex.ruNo ratings yet
- CS3001 EManual (Pilot) SPANISH Pt1Document50 pagesCS3001 EManual (Pilot) SPANISH Pt1eddyfredy100% (2)
- Aircraft Design Project - IDocument23 pagesAircraft Design Project - Irishitha reddyNo ratings yet
- Calculation Note: Allowable Stress DesignDocument6 pagesCalculation Note: Allowable Stress DesignGabrielNo ratings yet
- Piper - PA 28 180CDocument48 pagesPiper - PA 28 180CIlias FaqirNo ratings yet
- Specifications: Heel OaderDocument4 pagesSpecifications: Heel OaderMat Pole LapriNo ratings yet
- TCDS - EASA - A - 565 - Issue - 03 - G 120TP - Maximum Mass IncreaseDocument11 pagesTCDS - EASA - A - 565 - Issue - 03 - G 120TP - Maximum Mass IncreaseAlbaz DarwishNo ratings yet
- 303.5cr GlobalDocument4 pages303.5cr GlobalWisawa Sithi-itsaraNo ratings yet
- 72-500 Caracteristique (Atr Aircraft)Document2 pages72-500 Caracteristique (Atr Aircraft)Mohamed SEBANo ratings yet
- Manitou MT 1335 Telescopic Telehandler Technical Spec Brochure Northern Lift Trucks CompressedDocument4 pagesManitou MT 1335 Telescopic Telehandler Technical Spec Brochure Northern Lift Trucks CompressedMahesa SanggadipaNo ratings yet
- Owners Handbook Piper Pa-28-160Document62 pagesOwners Handbook Piper Pa-28-160Jeremy JamesNo ratings yet
- Canrig TM80/120 SpecsDocument16 pagesCanrig TM80/120 Specsaris4silveyraNo ratings yet
- Manual Canrig 3Document16 pagesManual Canrig 3sertecs polNo ratings yet
- Nama: Razak Mohamadhan NIM: 2034290011 Prodi: Teknik Sipil Peralatan Konstruksi - Tugas 1 (Pertemuan 8) SoalDocument4 pagesNama: Razak Mohamadhan NIM: 2034290011 Prodi: Teknik Sipil Peralatan Konstruksi - Tugas 1 (Pertemuan 8) SoalRamo sutarmanNo ratings yet
- QuotationDocument1 pageQuotationkapil chounsashtteNo ratings yet
- Aircraft Dronier Do 228 NG N219 Beechcraft 1900D LET 410 NG Harbin Y12 F Saras MK-1Document2 pagesAircraft Dronier Do 228 NG N219 Beechcraft 1900D LET 410 NG Harbin Y12 F Saras MK-1Sharon RNo ratings yet
- 325LN 3LL00704 MERI Engine Test Cell Results-1Document2 pages325LN 3LL00704 MERI Engine Test Cell Results-1Daniel TekleNo ratings yet
- FlapsDocument13 pagesFlapsAlex RubidianNo ratings yet
- Especificacion de Valores de MotorDocument2 pagesEspecificacion de Valores de MotorSERTECC SASNo ratings yet
- Specifications: KID Teer OaderDocument4 pagesSpecifications: KID Teer OaderJose TractorNo ratings yet
- Placeholder - CDR PresentationDocument27 pagesPlaceholder - CDR Presentationapi-463868411No ratings yet
- SY155WDocument4 pagesSY155WLutfi DstrNo ratings yet
- MW - Rebalance 0.68.0Document75 pagesMW - Rebalance 0.68.0Satyam KanwarNo ratings yet
- Ini Ydraulic Xcavator: SpecificationsDocument4 pagesIni Ydraulic Xcavator: SpecificationsmikepetrivniyNo ratings yet
- 302.7 CR With Expandable Undercarriage Mini Excavator Brochure - Global Excluding China and Japan EnglishDocument4 pages302.7 CR With Expandable Undercarriage Mini Excavator Brochure - Global Excluding China and Japan EnglishjeremiahjareneNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- CFM56-5C Am-2387 - 23881332781490Document23 pagesCFM56-5C Am-2387 - 23881332781490amroushararaNo ratings yet
- A320 CB + ResetsDocument30 pagesA320 CB + ResetsamroushararaNo ratings yet
- Engine Stand TableDocument1 pageEngine Stand TableamroushararaNo ratings yet
- PN 181745-4 Cradle PW4090 ManualDocument39 pagesPN 181745-4 Cradle PW4090 ManualamroushararaNo ratings yet
- SAFA Course A - B - CDocument257 pagesSAFA Course A - B - CamroushararaNo ratings yet
- PW4090 ENGINE STAND PN 180059 Rev D Complete1294939830Document61 pagesPW4090 ENGINE STAND PN 180059 Rev D Complete1294939830amroushararaNo ratings yet
- AC - Checks A330-300Document5 pagesAC - Checks A330-300amroushararaNo ratings yet
- Ac Checks B777-IraqDocument1 pageAc Checks B777-IraqamroushararaNo ratings yet
- Am 2811 2563 - Rev U1352392661Document54 pagesAm 2811 2563 - Rev U1352392661amroushararaNo ratings yet
- AC Checks B777-200Document19 pagesAC Checks B777-200amroushararaNo ratings yet
- Ac Checks B737-AlxDocument2 pagesAc Checks B737-AlxamroushararaNo ratings yet
- CH 5 FiguresDocument11 pagesCH 5 FiguresamroushararaNo ratings yet
- AC - Checks A300-B4Document7 pagesAC - Checks A300-B4amroushararaNo ratings yet
- AC - Checks A321-231Document14 pagesAC - Checks A321-231amroushararaNo ratings yet
- Ac - Checks Erj 170 (Petro Air)Document3 pagesAc - Checks Erj 170 (Petro Air)amroushararaNo ratings yet
- AC - Checks A330-IRAQDocument1 pageAC - Checks A330-IRAQamroushararaNo ratings yet
- 11.In-Flight HebrewDocument20 pages11.In-Flight HebrewamroushararaNo ratings yet
- Cosplay FitnessDocument3 pagesCosplay FitnessamroushararaNo ratings yet
- AC - Checks A321-IRAQDocument3 pagesAC - Checks A321-IRAQamroushararaNo ratings yet
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
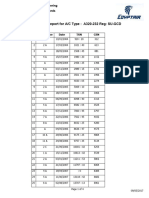
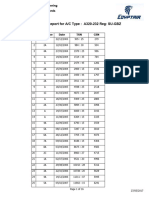
- AC - Checks A320-232 SU-GCDDocument4 pagesAC - Checks A320-232 SU-GCDamroushararaNo ratings yet
- AC - Checks A320-232Document16 pagesAC - Checks A320-232amroushararaNo ratings yet
- AC - Checks A300-600Document4 pagesAC - Checks A300-600amroushararaNo ratings yet
- CH 11 FiguresDocument11 pagesCH 11 FiguresamroushararaNo ratings yet
- CH 12 FiguresDocument11 pagesCH 12 FiguresamroushararaNo ratings yet
- CH 6 FiguresDocument21 pagesCH 6 FiguresamroushararaNo ratings yet
- CH 8 FiguresDocument12 pagesCH 8 FiguresamroushararaNo ratings yet
- CH 9 FiguresDocument13 pagesCH 9 FiguresamroushararaNo ratings yet
- CH 3 FiguresDocument9 pagesCH 3 FiguresamroushararaNo ratings yet
- CH 10 FiguresDocument11 pagesCH 10 FiguresamroushararaNo ratings yet
- CSEC Biology January 2007 P1 PDFDocument10 pagesCSEC Biology January 2007 P1 PDFNalisha Persaud100% (1)
- Chapter 8 - Profit MaximizationDocument93 pagesChapter 8 - Profit MaximizationRoshan BhattaNo ratings yet
- Gmail - Welcome Onboard - Onboarding Pass Ready (4zxqjqx5)Document1 pageGmail - Welcome Onboard - Onboarding Pass Ready (4zxqjqx5)Mahesh ReddyNo ratings yet
- Case Segway CaseDocument16 pagesCase Segway CaseRazeenaNo ratings yet
- Statement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceDocument2 pagesStatement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceLoan LoanNo ratings yet
- Electrolytes CC2 Students CopiesDocument2 pagesElectrolytes CC2 Students CopiesIdkNo ratings yet
- An Introduction To Mathematical ReasoninDocument3 pagesAn Introduction To Mathematical ReasoninGero Nimo100% (1)
- Gas Exchange in PlantsDocument1 pageGas Exchange in Plantskavya.gulatiNo ratings yet
- 0607 s09 QP 2 PDFDocument8 pages0607 s09 QP 2 PDFJoseph ThanaNo ratings yet
- Nature and Morphology of Ore DepositsDocument7 pagesNature and Morphology of Ore DepositsIrwan EP100% (3)
- NSP/004/109 (OHI 9) Guidance On Anti-Climbing Devices, Safety Signs and Labels Required On Overhead Line SupportsDocument25 pagesNSP/004/109 (OHI 9) Guidance On Anti-Climbing Devices, Safety Signs and Labels Required On Overhead Line SupportsMuhammad BilalNo ratings yet
- Contents - PID-based Practical Digital ControlDocument7 pagesContents - PID-based Practical Digital ControlGerman Silvino Alvarez GomezNo ratings yet
- Climate Smart DevelopmentDocument88 pagesClimate Smart DevelopmentandreluizmarquesNo ratings yet
- Broadening The Debate (Pros and Cons of Globalization)Document19 pagesBroadening The Debate (Pros and Cons of Globalization)Aghata Cândido CostaNo ratings yet
- Dbrac1120315 Ovm TMPLT Test Config 2751661Document42 pagesDbrac1120315 Ovm TMPLT Test Config 2751661ganesh_24No ratings yet
- 10 Typografi - Font KOKOHDocument1 page10 Typografi - Font KOKOHFarchan All in oneNo ratings yet
- RollPlayer FamiliarsDocument12 pagesRollPlayer FamiliarsХуан Брухо100% (1)
- ADMAS University Institutional Assessment Sector: ICT Occupation: ICT Support Level IDocument5 pagesADMAS University Institutional Assessment Sector: ICT Occupation: ICT Support Level IsssNo ratings yet
- Jim Dai Textbook PDFDocument168 pagesJim Dai Textbook PDFankushwreNo ratings yet
- Renewable Energy For Sustainable Growth Assessment: EditorsDocument2 pagesRenewable Energy For Sustainable Growth Assessment: EditorsPradeep SinglaNo ratings yet
- Pamphlet On Quality Assurance Planning PSC SleepersDocument6 pagesPamphlet On Quality Assurance Planning PSC SleepersDineshKMPNo ratings yet
- Manaloet Al 2020TowardsaSustainableCity-minDocument12 pagesManaloet Al 2020TowardsaSustainableCity-min----No ratings yet
- Independent Auditor's ReportDocument9 pagesIndependent Auditor's Reporttidomam303No ratings yet
- Concept of Statistical Quality ControlDocument51 pagesConcept of Statistical Quality ControlTehmeena BegumNo ratings yet
- A Review of Explicit Approximations of Colebrook's EquationDocument5 pagesA Review of Explicit Approximations of Colebrook's EquationkangsungjinNo ratings yet
- S9300&S9300E V200R001C00 Hardware Description 05 PDFDocument282 pagesS9300&S9300E V200R001C00 Hardware Description 05 PDFmike_mnleeNo ratings yet