You might also like
- CJ2+ - FPGDocument32 pagesCJ2+ - FPGR SNo ratings yet
- Drones Identification Poster (2013)Document1 pageDrones Identification Poster (2013)Aviation/Space History LibraryNo ratings yet
- The GE90 - An IntroductionDocument18 pagesThe GE90 - An IntroductionIshan KakadNo ratings yet
- Hitachi TrainingmanualDocument139 pagesHitachi TrainingmanualPrudz92% (12)
- Pa42 QRH 2 PerDocument20 pagesPa42 QRH 2 PerAnonymous ib89TV100% (1)
- UAV Specs PDFDocument12 pagesUAV Specs PDFMario Gómez Martínez100% (1)
- Introduction To The DA42Document127 pagesIntroduction To The DA42DavidNo ratings yet
- Aircraft Design ReportDocument95 pagesAircraft Design ReportMayank Agrawal100% (1)
- Sample Request Letter For Police Clearance Certificate in QatarDocument15 pagesSample Request Letter For Police Clearance Certificate in QatarJayson Benedick Colobong0% (2)
- Aeromodelling DesignDocument70 pagesAeromodelling DesignMayank AgrawalNo ratings yet
- SAFA Course A - B - CDocument257 pagesSAFA Course A - B - CamroushararaNo ratings yet
- Manoeuvring BookletDocument34 pagesManoeuvring BookletvDeepDive100% (1)
- The GE90 - An IntroductionDocument18 pagesThe GE90 - An IntroductionOsman ParlakNo ratings yet
- Short Range UavDocument40 pagesShort Range UavthiyagusaraNo ratings yet
- Hyundai Robex 300LC-9S Service ManualDocument41 pagesHyundai Robex 300LC-9S Service Manualmohammed barghothiNo ratings yet
- Cessna Model 700 FPG PDFDocument32 pagesCessna Model 700 FPG PDFNobodyHere100% (1)
- Drone Delivery SystemDocument20 pagesDrone Delivery SystemRakibul Hassan100% (2)
- KFC ProjectDocument32 pagesKFC ProjectHamid Reza Karevan100% (2)
- Transfer Switch Controls TS1311 (Line-To-neutral) - Cummins Inc.Document4 pagesTransfer Switch Controls TS1311 (Line-To-neutral) - Cummins Inc.ManoelNo ratings yet
- Quiz Infection Prevention and Control MDocument3 pagesQuiz Infection Prevention and Control MGareth McKnight0% (1)
- Cursus Hinowa GL17.75 S3Document129 pagesCursus Hinowa GL17.75 S3Folkwin LapNo ratings yet
- TCDS - EASA - A - 565 - Issue - 03 - G 120TP - Maximum Mass IncreaseDocument11 pagesTCDS - EASA - A - 565 - Issue - 03 - G 120TP - Maximum Mass IncreaseAlbaz DarwishNo ratings yet
- ABB Robotics Product Range Brochure 2013Document44 pagesABB Robotics Product Range Brochure 2013Prabhu RamNo ratings yet
- Integration of Well and Seismic Data Using Geostatistics 2Document101 pagesIntegration of Well and Seismic Data Using Geostatistics 2Charles U Iyare100% (2)
- Serie X7.6 PDFDocument400 pagesSerie X7.6 PDFAndrei Mihai100% (1)
- CH 1 FiguresDocument14 pagesCH 1 FiguresamroushararaNo ratings yet
- MW - Rebalance 0.68.0Document75 pagesMW - Rebalance 0.68.0Satyam KanwarNo ratings yet
- CH 3 FiguresDocument9 pagesCH 3 FiguresamroushararaNo ratings yet
- F35 ASpr 11Document32 pagesF35 ASpr 11Mahendra Pratap SinghNo ratings yet
- Performance Analysis of A Piston Engined AirplaneDocument50 pagesPerformance Analysis of A Piston Engined AirplaneANo ratings yet
- DA42 MPP Guardian Facts and SpecsDocument3 pagesDA42 MPP Guardian Facts and Specstomay777No ratings yet
- Joint Heavy Lift (JHL) - JSF Lift Fan DerivativeDocument43 pagesJoint Heavy Lift (JHL) - JSF Lift Fan Derivativeflateric74@yandex.ruNo ratings yet
- Let L410Document6 pagesLet L410jarinariadNo ratings yet
- B-52, The "StratoFortress"Document15 pagesB-52, The "StratoFortress"ardazerokNo ratings yet
- Vfefv Mark 7 Lagont: Turret DetailDocument5 pagesVfefv Mark 7 Lagont: Turret Detailsam mckenzie100% (1)
- Renewal Scenario E de KockDocument12 pagesRenewal Scenario E de KockAsim AnandNo ratings yet
- DCS FA 18C Combat Fundamentals v23.06.19Document213 pagesDCS FA 18C Combat Fundamentals v23.06.19tischlerbarnabasNo ratings yet
- ADP Project 1Document32 pagesADP Project 1KishoremcNo ratings yet
- d7r II Vs D85ex-15 Perf Report (Texr0406)Document6 pagesd7r II Vs D85ex-15 Perf Report (Texr0406)firman manaluNo ratings yet
- LR Mate 100 Ibm ManualDocument144 pagesLR Mate 100 Ibm ManualManuel GutierrezNo ratings yet
- Calculation Note: Allowable Stress DesignDocument6 pagesCalculation Note: Allowable Stress DesignGabrielNo ratings yet
- Perf Rep D155a5Document8 pagesPerf Rep D155a5SandyNo ratings yet
- HYIUNDAI R300LC 9S SM PreviewDocument41 pagesHYIUNDAI R300LC 9S SM PreviewAthos IbrainNo ratings yet
- Poh Sd-1 TG Se-33Document19 pagesPoh Sd-1 TG Se-33Łukasz50% (2)
- GSLV-F10 GISAT 1 Launch Kit FinalDocument6 pagesGSLV-F10 GISAT 1 Launch Kit FinalFelix BerlinNo ratings yet
- European Aviation Safety Agency: Easa Type-Certificate Data SheetDocument10 pagesEuropean Aviation Safety Agency: Easa Type-Certificate Data SheetPeter SengeNo ratings yet
- Space: Flight Readiness ReviewDocument22 pagesSpace: Flight Readiness ReviewGenji Ömer GerezNo ratings yet
- A380 ReferenceDocument12 pagesA380 Referencesubha_aeroNo ratings yet
- Defense Airborne 3Document12 pagesDefense Airborne 3Pedro LucasNo ratings yet
- Airport PlanningDocument18 pagesAirport PlanningBeka KarumidzeNo ratings yet
- Aircraft Design I: A. Mission SpecificationsDocument11 pagesAircraft Design I: A. Mission SpecificationsKarl Patrick SiegaNo ratings yet
- TCDS - A - 038 - SWIFT - S-1 - Iss 2Document6 pagesTCDS - A - 038 - SWIFT - S-1 - Iss 2ewiontkoNo ratings yet
- Chapter I: B777: Aircraft Handling ManualDocument29 pagesChapter I: B777: Aircraft Handling Manualapi-37058910% (1)
- CH 12 FiguresDocument11 pagesCH 12 FiguresamroushararaNo ratings yet
- DCS F-18C Combat Fundamentals - v1.5Document213 pagesDCS F-18C Combat Fundamentals - v1.5Peter Hoole-jacksonNo ratings yet
- ReportDocument6 pagesReportlpk11asusiloNo ratings yet
- Mission Specification For A Jet TransportDocument24 pagesMission Specification For A Jet TransportAdha LuriNo ratings yet
- British Microlight Aircraft Association Homebuilt Aircraft Data Sheet (Hads) No: Hm4 Issue: 18 Skyranger (Uk)Document26 pagesBritish Microlight Aircraft Association Homebuilt Aircraft Data Sheet (Hads) No: Hm4 Issue: 18 Skyranger (Uk)Mario GomesNo ratings yet
- Chapter 19 CranesDocument6 pagesChapter 19 CranesMurad AlmoudiNo ratings yet
- CH 09 Rotary WingDocument20 pagesCH 09 Rotary WingPGNo ratings yet
- Milestone PresentationDocument33 pagesMilestone PresentationESTEBAN LLANONo ratings yet
- CAN II 11.13 Vessel General Information - 01.06.2018Document4 pagesCAN II 11.13 Vessel General Information - 01.06.2018hatakerobotNo ratings yet
- DCS F-16C Combat Fundamentals - v23.06.19Document214 pagesDCS F-16C Combat Fundamentals - v23.06.19Carlos CasasNo ratings yet
- Zenith Ch650Document31 pagesZenith Ch650Aravinthan VarunNo ratings yet
- GIA 64 Installation/User GuideDocument9 pagesGIA 64 Installation/User GuideAntonioNo ratings yet
- A320 CB + ResetsDocument30 pagesA320 CB + ResetsamroushararaNo ratings yet
- PN 181745-4 Cradle PW4090 ManualDocument39 pagesPN 181745-4 Cradle PW4090 ManualamroushararaNo ratings yet
- Am 2811 2563 - Rev U1352392661Document54 pagesAm 2811 2563 - Rev U1352392661amroushararaNo ratings yet
- Engine Stand TableDocument1 pageEngine Stand TableamroushararaNo ratings yet
- CFM56-5C Am-2387 - 23881332781490Document23 pagesCFM56-5C Am-2387 - 23881332781490amroushararaNo ratings yet
- AC Checks B777-200Document19 pagesAC Checks B777-200amroushararaNo ratings yet
- AC - Checks A330-IRAQDocument1 pageAC - Checks A330-IRAQamroushararaNo ratings yet
- PW4090 ENGINE STAND PN 180059 Rev D Complete1294939830Document61 pagesPW4090 ENGINE STAND PN 180059 Rev D Complete1294939830amroushararaNo ratings yet
- Ac Checks B777-IraqDocument1 pageAc Checks B777-IraqamroushararaNo ratings yet
- Ac - Checks Erj 170 (Petro Air)Document3 pagesAc - Checks Erj 170 (Petro Air)amroushararaNo ratings yet
- AC - Checks A321-231Document14 pagesAC - Checks A321-231amroushararaNo ratings yet
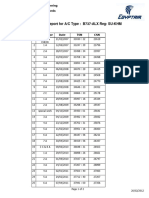
- Ac Checks B737-AlxDocument2 pagesAc Checks B737-AlxamroushararaNo ratings yet
- AC - Checks A300-600Document4 pagesAC - Checks A300-600amroushararaNo ratings yet
- AC - Checks A330-300Document5 pagesAC - Checks A330-300amroushararaNo ratings yet
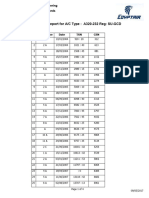
- AC - Checks A320-232 SU-GCDDocument4 pagesAC - Checks A320-232 SU-GCDamroushararaNo ratings yet
- AC - Checks A321-IRAQDocument3 pagesAC - Checks A321-IRAQamroushararaNo ratings yet
- 11.In-Flight HebrewDocument20 pages11.In-Flight HebrewamroushararaNo ratings yet
- AC - Checks A300-B4Document7 pagesAC - Checks A300-B4amroushararaNo ratings yet
- CH 11 FiguresDocument11 pagesCH 11 FiguresamroushararaNo ratings yet
- Cosplay FitnessDocument3 pagesCosplay FitnessamroushararaNo ratings yet
- AC - Checks A320-232Document16 pagesAC - Checks A320-232amroushararaNo ratings yet
- CH 8 FiguresDocument12 pagesCH 8 FiguresamroushararaNo ratings yet
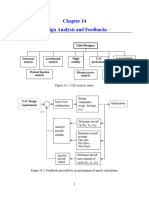
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- CH 10 FiguresDocument11 pagesCH 10 FiguresamroushararaNo ratings yet
- CH 12 FiguresDocument11 pagesCH 12 FiguresamroushararaNo ratings yet
- CH 9 FiguresDocument13 pagesCH 9 FiguresamroushararaNo ratings yet
- CH 6 FiguresDocument21 pagesCH 6 FiguresamroushararaNo ratings yet
- CH 5 FiguresDocument11 pagesCH 5 FiguresamroushararaNo ratings yet
- IC Construction RiskDocument7 pagesIC Construction RiskmiptahulNo ratings yet
- Undergraduate Research ProjectDocument47 pagesUndergraduate Research ProjectToyin Michael Onagoruwa XviNo ratings yet
- 5.. 1055-2185-1-RV. Jurnal JPPT Lampung Pasta Bawang MerahDocument6 pages5.. 1055-2185-1-RV. Jurnal JPPT Lampung Pasta Bawang MerahLorine TantaluNo ratings yet
- After Hours - AR ThomasDocument338 pagesAfter Hours - AR ThomasThinaya JayarathneNo ratings yet
- luZ6Vv70 PDFDocument12 pagesluZ6Vv70 PDFAna BelleNo ratings yet
- 077154C-000-STC-0490-000 - B - STD - Const. DrawingDocument79 pages077154C-000-STC-0490-000 - B - STD - Const. DrawingDarshan PanchalNo ratings yet
- Elements of Workshop Technology by Hajra Choudhary PDFDocument4 pagesElements of Workshop Technology by Hajra Choudhary PDFShakeel Mohmand25% (12)
- 4 Types of Business OrganizationsDocument3 pages4 Types of Business OrganizationsAnton AndayaNo ratings yet
- Labour Complaint FormDocument2 pagesLabour Complaint Formmozhi selvamNo ratings yet
- Yarn RequisitionDocument8 pagesYarn RequisitionAzim UddinNo ratings yet
- Chapter 4: Redemption of Pref Share & Debentures Topic: Redemption of Debentures. Practice QuestionsDocument53 pagesChapter 4: Redemption of Pref Share & Debentures Topic: Redemption of Debentures. Practice QuestionsMercy GamingNo ratings yet
- FIAPA ReviewerrDocument8 pagesFIAPA ReviewerrChristianne Sophia AngeloNo ratings yet
- Data Structure and Algorithum LAB 02Document8 pagesData Structure and Algorithum LAB 02earn moneyNo ratings yet
- CATALOGO Scorziello SASADocument52 pagesCATALOGO Scorziello SASAantonio_militeNo ratings yet
- Enterprise Resources Planning (ERP) 2610002Document2 pagesEnterprise Resources Planning (ERP) 2610002Virendra Arekar100% (1)
- Power Macintosh 9600/200 and 9600/200MPDocument2 pagesPower Macintosh 9600/200 and 9600/200MPscriNo ratings yet
- Object TrackingDocument23 pagesObject TrackingRahul PaulNo ratings yet
- Cricbuzz - Google SearchDocument1 pageCricbuzz - Google SearchFranklin OmejeNo ratings yet
- Materilaspresentation 151211133439Document13 pagesMaterilaspresentation 151211133439Ethan HuntNo ratings yet
- Cmiller CSW 2010Document90 pagesCmiller CSW 2010dty001No ratings yet
- RA-035112 - PROFESSIONAL TEACHER - Secondary (Social Studies) - KIDAPAWAN COTABATO - 9-2019 PDFDocument37 pagesRA-035112 - PROFESSIONAL TEACHER - Secondary (Social Studies) - KIDAPAWAN COTABATO - 9-2019 PDFPhilBoardResultsNo ratings yet
- 10 Questions For Comprehensive Succession PlanningDocument2 pages10 Questions For Comprehensive Succession PlanningBESmithIncNo ratings yet
- Brand Profiling: Moledro: MymoledroDocument11 pagesBrand Profiling: Moledro: MymoledroRachana DasNo ratings yet
- Time in Porphyry Cu - Au Development Corbett - Pacrim 2019 - BDocument5 pagesTime in Porphyry Cu - Au Development Corbett - Pacrim 2019 - BHumberto SalvadorNo ratings yet