You might also like
- Well Performance Verification Guidebook - q1 2022 - FinalDocument45 pagesWell Performance Verification Guidebook - q1 2022 - FinalAbdul HakimNo ratings yet
- Measurement: DEE10013 DevicesDocument17 pagesMeasurement: DEE10013 DevicesAmir EqwanNo ratings yet
- Measuring InstrumentsDocument45 pagesMeasuring InstrumentsRavinder Minhas100% (1)
- Chapter 3Document28 pagesChapter 3MulugetaNo ratings yet
- Unit 2 Electrical InstrumentDocument45 pagesUnit 2 Electrical InstrumentBoopathy C P100% (1)
- Mi ElecrrodynamicDocument26 pagesMi ElecrrodynamicEvoque YTNo ratings yet
- EEEE2201 Lecture Note Chap2Document10 pagesEEEE2201 Lecture Note Chap2Fataahu Nyuydze KehkimokiNo ratings yet
- Electrical Measuring Instruments and INSTRUMENTATION List of Contents 1. Introduction To Electrical Measuring InstrumentsDocument23 pagesElectrical Measuring Instruments and INSTRUMENTATION List of Contents 1. Introduction To Electrical Measuring InstrumentsMika LavadoNo ratings yet
- Unit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Document16 pagesUnit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Deep ChowdhuryNo ratings yet
- Topics To Be Discussed: - Voltmeter Sensitivity. - Voltmeter LoadingDocument90 pagesTopics To Be Discussed: - Voltmeter Sensitivity. - Voltmeter LoadingPadarbinda SamalNo ratings yet
- Electrical Measuring Devices and MeasurementDocument62 pagesElectrical Measuring Devices and MeasurementDanelNo ratings yet
- GalvanometerDocument60 pagesGalvanometergungunNo ratings yet
- Emi - CH 2 - Analog Measurement of Electrical QuantitiesDocument48 pagesEmi - CH 2 - Analog Measurement of Electrical QuantitiesDIGESH SHAHNo ratings yet
- MI InstrumentsDocument26 pagesMI InstrumentsPriya PriyaNo ratings yet
- EEM Unit 2Document20 pagesEEM Unit 2Bhavesh BodkeNo ratings yet
- Measure CHDocument60 pagesMeasure CHIshu KumarNo ratings yet
- Analog Meters (Analog Electromechanical Instruments)Document25 pagesAnalog Meters (Analog Electromechanical Instruments)zemichaelNo ratings yet
- Electrical Indicating InstrumentsDocument120 pagesElectrical Indicating InstrumentsSukanta MallickNo ratings yet
- Connection DiagramsDocument48 pagesConnection DiagramsSohaib AbdulazizNo ratings yet
- 1 Binoy PMMCDocument38 pages1 Binoy PMMCsujeenNo ratings yet
- UNIT 2-Electrical and Electronic InstrumentsDocument147 pagesUNIT 2-Electrical and Electronic InstrumentspoornimaNo ratings yet
- Types of InstrumentsDocument33 pagesTypes of InstrumentsAbdul Noman AbbasiNo ratings yet
- Module - V: Electrical MeasurementsDocument31 pagesModule - V: Electrical MeasurementsSaandeep Reddipalli 21BCE2885No ratings yet
- Eee 207 - Chapter 5 & 6Document36 pagesEee 207 - Chapter 5 & 6Naija RonaldoNo ratings yet
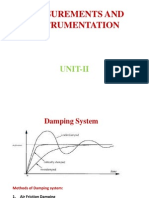
- Measurements and Instrumentation: Unit-IiDocument22 pagesMeasurements and Instrumentation: Unit-IisambathrajeshNo ratings yet
- Chapter 2-Measuring InstrumentDocument28 pagesChapter 2-Measuring InstrumentsaravananNo ratings yet
- Chapter 2Document92 pagesChapter 2Ram Bahadur KhadkaNo ratings yet
- Chapter TwoDocument69 pagesChapter Twohaileasrat4No ratings yet
- Chapter 3Document64 pagesChapter 3ASIT SHARMANo ratings yet
- Permanent Magnet Moving CoilDocument3 pagesPermanent Magnet Moving Coiltooba mukhtarNo ratings yet
- PMMCDocument66 pagesPMMCEvoque YTNo ratings yet
- Measuring Instruments: By: Nafees Ahmed, Asstt, Prof, EE Deptt, DIT, DehradunDocument39 pagesMeasuring Instruments: By: Nafees Ahmed, Asstt, Prof, EE Deptt, DIT, DehradunSarthak Singh ChandelNo ratings yet
- Induction Type Indicating InstrumentsDocument21 pagesInduction Type Indicating InstrumentsMonty KushwahaNo ratings yet
- Electrical Principles 2 (CCEET 2)Document25 pagesElectrical Principles 2 (CCEET 2)Bernard MunyithyaNo ratings yet
- EMMI QuestionsDocument31 pagesEMMI QuestionsRAHULNo ratings yet
- TOPIC 2A Measurement DevicesDocument24 pagesTOPIC 2A Measurement DevicesBryan MatthiasNo ratings yet
- Analog Measuring Instruments: ObjectivesDocument17 pagesAnalog Measuring Instruments: ObjectivesMani MalNo ratings yet
- Moving Iron Instrument - NCDocument10 pagesMoving Iron Instrument - NCNABANITA CHATTERJEENo ratings yet
- Unit 4 Bee NotesDocument47 pagesUnit 4 Bee NotesSagar VatsNo ratings yet
- Chapter 2 GamalDocument66 pagesChapter 2 GamalJerc ZajNo ratings yet
- Unit-2 ANS KEYDocument13 pagesUnit-2 ANS KEYRajaNo ratings yet
- Essential Components of Indicating InstrumentsDocument6 pagesEssential Components of Indicating InstrumentsHina AsifNo ratings yet
- Unit-2 EMIDocument71 pagesUnit-2 EMIsagarpandit2No ratings yet
- Measuring InstrumentDocument86 pagesMeasuring InstrumenteddoNo ratings yet
- Instrumentation and Measurement Lec3Document15 pagesInstrumentation and Measurement Lec3MairaNo ratings yet
- DynamometerDocument7 pagesDynamometerGaurav S PatilNo ratings yet
- Measurements 006Document6 pagesMeasurements 006Hemed hafidhNo ratings yet
- Types of Instruments: What Is Meant by ?Document42 pagesTypes of Instruments: What Is Meant by ?Anushya RavikumarNo ratings yet
- Material - CompleteDocument84 pagesMaterial - CompleteApoorvNo ratings yet
- EE18151-Basic Electrical and Electronics Eng UNIT-I: Permanent Magnet Moving Coil Instruments (PMMC)Document12 pagesEE18151-Basic Electrical and Electronics Eng UNIT-I: Permanent Magnet Moving Coil Instruments (PMMC)thamizmaniNo ratings yet
- Unit 2: Electronic Measurement For Measuring Basic ParametersDocument16 pagesUnit 2: Electronic Measurement For Measuring Basic ParametersSiva Sai Ram100% (1)
- Moving Coil and Moving Iron PrinciplesDocument10 pagesMoving Coil and Moving Iron PrinciplesAnil HerathNo ratings yet
- Unit-2 EMIDocument72 pagesUnit-2 EMISujatha UthamarajNo ratings yet
- Inductors and Display DevicesDocument65 pagesInductors and Display DevicesRAJIV SINGHNo ratings yet
- EE 3204 Lec 01Document31 pagesEE 3204 Lec 01earl pannilaNo ratings yet
- Electrical Measurements & InstrumentationDocument86 pagesElectrical Measurements & InstrumentationDulecha Adane DulechaNo ratings yet
- PMMCDocument22 pagesPMMCummehr2017No ratings yet
- 4-Moving Coil Instruments Fall 2017Document23 pages4-Moving Coil Instruments Fall 2017AHMED BAKRNo ratings yet
- 4-Moving Coil Instruments Fall 2016Document21 pages4-Moving Coil Instruments Fall 2016AHMED BAKRNo ratings yet
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Coerce Mean - Google SearchDocument1 pageCoerce Mean - Google Searchj2yshjzzsxNo ratings yet
- Tutorial 4 (Q) 2023Document3 pagesTutorial 4 (Q) 2023j2yshjzzsxNo ratings yet
- Zumbi Brazil - Google SearchDocument1 pageZumbi Brazil - Google Searchj2yshjzzsxNo ratings yet
- EEL1176 Lecture 3-Part 1 2022Document45 pagesEEL1176 Lecture 3-Part 1 2022j2yshjzzsxNo ratings yet
- Chapter 6 Measurement of Non-Electrical Quantities Term 2220Document72 pagesChapter 6 Measurement of Non-Electrical Quantities Term 2220j2yshjzzsxNo ratings yet
- MATLAB Workshop 2022Document12 pagesMATLAB Workshop 2022j2yshjzzsxNo ratings yet
- 2022-2023-Tri 3-EEE1046-Tutorial 2Document4 pages2022-2023-Tri 3-EEE1046-Tutorial 2j2yshjzzsxNo ratings yet
- Physicists Watch Quantum Particles Tunnel Through Solid Barriers. Here's What They Found. Live ScienceDocument1 pagePhysicists Watch Quantum Particles Tunnel Through Solid Barriers. Here's What They Found. Live Sciencej2yshjzzsxNo ratings yet
- What Is An Open Day - Google SearchDocument1 pageWhat Is An Open Day - Google Searchj2yshjzzsxNo ratings yet
- 2022 2023 Tri 3 EEE1046 Chapter 2B Practical Op Amp LimitationsDocument40 pages2022 2023 Tri 3 EEE1046 Chapter 2B Practical Op Amp Limitationsj2yshjzzsxNo ratings yet
- Chapter 3 - EEE1036 T3 (2230) 2022 - 2023Document122 pagesChapter 3 - EEE1036 T3 (2230) 2022 - 2023j2yshjzzsxNo ratings yet
- Machines Part2 SolutionDocument7 pagesMachines Part2 Solutionj2yshjzzsxNo ratings yet
- Graph Sketching 3 Nov 3pm T2215 AnnotatedDocument16 pagesGraph Sketching 3 Nov 3pm T2215 Annotatedj2yshjzzsxNo ratings yet
- Asia Pacific University (APU) Award-Winning Malaysian UniversityDocument1 pageAsia Pacific University (APU) Award-Winning Malaysian Universityj2yshjzzsxNo ratings yet
- Prob NotesDocument2 pagesProb Notesj2yshjzzsxNo ratings yet
- Chapter 5 Magnetic Measurement Term2220Document56 pagesChapter 5 Magnetic Measurement Term2220j2yshjzzsxNo ratings yet
- Tutorial 5 (Q) 2023Document3 pagesTutorial 5 (Q) 2023j2yshjzzsxNo ratings yet
- Chapter 3A - Single-Phase Transformers (Student)Document70 pagesChapter 3A - Single-Phase Transformers (Student)j2yshjzzsxNo ratings yet
- Chapter 3 - Part 1Document2 pagesChapter 3 - Part 1j2yshjzzsxNo ratings yet
- Horsepower Definition - Google SearchDocument1 pageHorsepower Definition - Google Searchj2yshjzzsxNo ratings yet
- Nov 0282Document380 pagesNov 0282j2yshjzzsxNo ratings yet
- What Is The Lift Formula or Equation - Helicopter Study GuideDocument3 pagesWhat Is The Lift Formula or Equation - Helicopter Study GuideИстребитель ПилотNo ratings yet
- Ib Physics - Unit 1 - Science SkillsDocument58 pagesIb Physics - Unit 1 - Science SkillsSaketh VuppalapatiNo ratings yet
- Mech 223 EteeapDocument4 pagesMech 223 EteeapJohn Renz RetiroNo ratings yet
- Measurement of Spring Constant of Spiral Spring and Acceleration Due To Gravity GDocument7 pagesMeasurement of Spring Constant of Spiral Spring and Acceleration Due To Gravity Garwa zeglam100% (1)
- Optimization of Fiber Bragg Grating Parameters For Sensing ApplicationsDocument11 pagesOptimization of Fiber Bragg Grating Parameters For Sensing Applications미니마니모No ratings yet
- Core Loss TestersDocument4 pagesCore Loss TestersDavid GonzalezNo ratings yet
- Activity 5 Chapter 3Document6 pagesActivity 5 Chapter 3Nick RubioNo ratings yet
- Force and Motion: ESCI 101 (Physics For Engineers)Document16 pagesForce and Motion: ESCI 101 (Physics For Engineers)Irine ConstantinoNo ratings yet
- General Physics2 Lesson 2 PDFDocument4 pagesGeneral Physics2 Lesson 2 PDFJohn Renzo MolinarNo ratings yet
- Mse Sw2aDocument12 pagesMse Sw2amarkkkkkNo ratings yet
- Schneider Startup Test ProcedureDocument45 pagesSchneider Startup Test ProcedureJonathan Feruelo100% (1)
- Kinematics FDocument83 pagesKinematics F蒋欢欢No ratings yet
- ACS150-03E-07A5-2 PN 1,5kW, I2n 7,5A IP20Document3 pagesACS150-03E-07A5-2 PN 1,5kW, I2n 7,5A IP20David CascoNo ratings yet
- Theory Question - MotionDocument2 pagesTheory Question - MotionAvik PaulNo ratings yet
- 6.3 The Auxiliary Field H: / Z (Fig. 6.18 (B) ), So (J) M y M ZDocument2 pages6.3 The Auxiliary Field H: / Z (Fig. 6.18 (B) ), So (J) M y M Znavansh bansalNo ratings yet
- Math 7 Q2 Week 2Document17 pagesMath 7 Q2 Week 2Joshrel V. CieloNo ratings yet
- NPSH For Metering PumpsDocument7 pagesNPSH For Metering PumpsRahul S. ChandrawarNo ratings yet
- Fans & BlowersDocument53 pagesFans & BlowersSingaravelu MariappanNo ratings yet
- Bernoullis Equation EngineeringduniyacomDocument26 pagesBernoullis Equation EngineeringduniyacomMuhammad DodyNo ratings yet
- Physics: Eleventh EditionDocument43 pagesPhysics: Eleventh EditionbaderNo ratings yet
- Calculus 2 Final Exam PDFDocument46 pagesCalculus 2 Final Exam PDFazs88.bscpe.amauniversityNo ratings yet
- Rosemount 3051S Multivariable Transmitter: Simplifying Mass Flow MeasurementDocument2 pagesRosemount 3051S Multivariable Transmitter: Simplifying Mass Flow MeasurementYogi KipiantoNo ratings yet
- Scalar VectorDocument53 pagesScalar VectorSheilaNo ratings yet
- Xi Physics - Sqp-Set 3Document3 pagesXi Physics - Sqp-Set 3Ben TenNo ratings yet
- Lexe0167 00Document10 pagesLexe0167 00Victor PoquizNo ratings yet
- Physics: Syllabus For Higher Secondary Final Year CourseDocument5 pagesPhysics: Syllabus For Higher Secondary Final Year CoursesatishNo ratings yet
- Govt. Pilot High School Rawalakot AJK Pre-Board ExamDocument10 pagesGovt. Pilot High School Rawalakot AJK Pre-Board ExamAbdul qadeerNo ratings yet
- Main Battery 40678-2Document96 pagesMain Battery 40678-2Luis Parra100% (1)
- EXP6 - Laminar and Turbulent Flow ReportDocument4 pagesEXP6 - Laminar and Turbulent Flow ReportPoochi DougNo ratings yet