You might also like
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Fan Inertia PDFDocument8 pagesFan Inertia PDFrkukgNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Application Guide For Selecting AC Motors Capable of Overcoming Fan Inertia FE 1800Document8 pagesApplication Guide For Selecting AC Motors Capable of Overcoming Fan Inertia FE 1800Atul SanghaviNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Application Guide For Selecting Ac Motors Capable of Overcoming Fan Inertia Fe 1800Document8 pagesApplication Guide For Selecting Ac Motors Capable of Overcoming Fan Inertia Fe 1800cavasqueNo ratings yet
- Basic Motor Formulas and Calculations: Rules of Thumb (Approximation)Document10 pagesBasic Motor Formulas and Calculations: Rules of Thumb (Approximation)Angga Prasetya KusumanataNo ratings yet
- Basic Motor Formulas and Calculations PDFDocument11 pagesBasic Motor Formulas and Calculations PDFAditya Shrivastava100% (2)
- Calculating Motor Start TimeDocument8 pagesCalculating Motor Start TimeRaj SekharNo ratings yet
- Alstom - Electric Motors Questions and AnswersDocument56 pagesAlstom - Electric Motors Questions and AnswersGanesh KumarNo ratings yet
- Brake Torque and Power PDFDocument2 pagesBrake Torque and Power PDFFarzadNo ratings yet
- Relationship Between Torque and Power PDFDocument4 pagesRelationship Between Torque and Power PDFIgidio PedroNo ratings yet
- Reliance - Formulas & CalculationsDocument10 pagesReliance - Formulas & CalculationsSonia RainaNo ratings yet
- Chapter 2 Internal Combustion Engine Performance ParametersDocument10 pagesChapter 2 Internal Combustion Engine Performance ParametersFlancNo ratings yet
- Basic Motor Formulas and CalculationsDocument9 pagesBasic Motor Formulas and Calculationsmareymorsy2822100% (1)
- Design of Fly Wheel (Lecture-05)Document36 pagesDesign of Fly Wheel (Lecture-05)Waqas IbrahimNo ratings yet
- Motor Performance Characteristics and Application Guidelines - Fe 3100Document6 pagesMotor Performance Characteristics and Application Guidelines - Fe 3100proteuscarrillusNo ratings yet
- Performance Cycle Analysis On Turbo Fan Engine PW4000: Shray Benawra, Jiqiang Wang, Hong Yue, Georgi DimirovskyDocument6 pagesPerformance Cycle Analysis On Turbo Fan Engine PW4000: Shray Benawra, Jiqiang Wang, Hong Yue, Georgi DimirovskynrNo ratings yet
- Analysis Calculation Performance Engine Turbofan Cfm56Document8 pagesAnalysis Calculation Performance Engine Turbofan Cfm56AswanTajuddin100% (1)
- MECH 435 - IC Engine Laboratory ExperimentDocument9 pagesMECH 435 - IC Engine Laboratory Experimentdesie yalewNo ratings yet
- 2 - Introduction To Quiz - Wind Turbine Rotor Speed Control Strategy - New - Coursera PDFDocument5 pages2 - Introduction To Quiz - Wind Turbine Rotor Speed Control Strategy - New - Coursera PDFUsama MajeedNo ratings yet
- 2 Introduction To Quiz Wind Turbine Rotor Speed Control Strategy New CourseraDocument5 pages2 Introduction To Quiz Wind Turbine Rotor Speed Control Strategy New CourseraUsama Majeed33% (3)
- A New Method of Maximum Power Point Tracking For DFIG Based Wind TurbineDocument7 pagesA New Method of Maximum Power Point Tracking For DFIG Based Wind Turbinebalaji06202No ratings yet
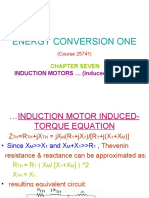
- Energy Conversion One: INDUCTION MOTORS (Induced Torque )Document10 pagesEnergy Conversion One: INDUCTION MOTORS (Induced Torque )prasad243243No ratings yet
- Energy Conversion 17Document10 pagesEnergy Conversion 17krishnareddy_chintalaNo ratings yet
- CP 2014 0872Document4 pagesCP 2014 0872ALI BOUKHRISSNo ratings yet
- METHODOLOGYDocument14 pagesMETHODOLOGYKipkirui YegoNo ratings yet
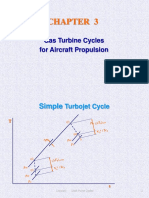
- Chapter 3 v2Document68 pagesChapter 3 v2Ryan EffendiNo ratings yet
- Methods For Increasing Region 2 Power CaDocument11 pagesMethods For Increasing Region 2 Power Cavorge daoNo ratings yet
- High Performance Drive Systems - . - . - . .Document8 pagesHigh Performance Drive Systems - . - . - . .avi013No ratings yet
- Application of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorDocument6 pagesApplication of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorchetanNo ratings yet
- Energy Conversion 17Document10 pagesEnergy Conversion 17protectionworkNo ratings yet
- Turbo MachineDocument245 pagesTurbo MachineKaren NelsonNo ratings yet
- Gasturb Project: Submitted By: Dev Prakash (16AE30001)Document9 pagesGasturb Project: Submitted By: Dev Prakash (16AE30001)dev burmanNo ratings yet
- Swes Unit 3Document64 pagesSwes Unit 3pradeepNo ratings yet
- 6 AE451 FixedenginesizingDocument42 pages6 AE451 FixedenginesizingEmine ÇağlarNo ratings yet
- Presentation On Hydraulic TurbineDocument32 pagesPresentation On Hydraulic TurbineMudrika PatelNo ratings yet
- Isn't It Obvious? It Does So Because It Is Commanded To Do So, You Said So Yourself. All Good Generators Do As Commanded, Don't They?Document10 pagesIsn't It Obvious? It Does So Because It Is Commanded To Do So, You Said So Yourself. All Good Generators Do As Commanded, Don't They?abhijit.adgube3376No ratings yet
- Unit 1Document37 pagesUnit 121E102 - ADHINESWARAN KNo ratings yet
- Lecture Notes - Set2Document78 pagesLecture Notes - Set2Ssh keys JoshNo ratings yet
- Sliding Mode Control Strategy For Variable Speed Wind TurbineDocument5 pagesSliding Mode Control Strategy For Variable Speed Wind TurbineDuyên Nguyễn NgọcNo ratings yet
- The Basic Motion ControlDocument3 pagesThe Basic Motion ControlEdgar David UribeNo ratings yet
- Motor Application FormulasDocument1 pageMotor Application FormulasMAJIDM3000No ratings yet
- Wind ExamDocument8 pagesWind ExamwaltikraNo ratings yet
- Papier STADocument6 pagesPapier STAAya BousselmiNo ratings yet
- 3-Steam Turbine GovernorDocument7 pages3-Steam Turbine GovernorVivek PawarNo ratings yet
- Randomwebsite Ref (Rms Torque)Document5 pagesRandomwebsite Ref (Rms Torque)Robotics LabNo ratings yet
- Diesel Engine PerformanceDocument6 pagesDiesel Engine PerformancelienaNo ratings yet
- Rotor in Vertical Flight: Momentum Theory and Wake AnalysisDocument5 pagesRotor in Vertical Flight: Momentum Theory and Wake AnalysisJuan David Valderrama ArtunduagaNo ratings yet
- Volumetric Efficiency: Object: To TheoryDocument3 pagesVolumetric Efficiency: Object: To Theoryahmad shaheenNo ratings yet
- EXP 5 To Determine Brake Power Fuel Consumption and Specific Fuel Consumption of A Four Stroke Spark Ignition Engine at Constant SpeedDocument3 pagesEXP 5 To Determine Brake Power Fuel Consumption and Specific Fuel Consumption of A Four Stroke Spark Ignition Engine at Constant Speed70130046No ratings yet
- Helicopter Power RequiredDocument2 pagesHelicopter Power RequiredshyamsundarsrNo ratings yet
- The Basics of Motion Control-Part 2Document3 pagesThe Basics of Motion Control-Part 2Ágost VitaNo ratings yet
- Ringkasan Teori Dan Amali (Industrial Ac Machine)Document12 pagesRingkasan Teori Dan Amali (Industrial Ac Machine)Kiflie DalmansaNo ratings yet
- Wind Energy Training Ch#3Document99 pagesWind Energy Training Ch#3Munseb AliNo ratings yet
- A Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleDocument6 pagesA Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleKhiem NguyenNo ratings yet
- Spiteri Winercost Workshop ProceedingsDocument12 pagesSpiteri Winercost Workshop Proceedingssteinman1No ratings yet
- Pelton Turbine TestDocument13 pagesPelton Turbine TestZul FadzliNo ratings yet
- Power SystemDocument7 pagesPower SystemRebar KakaNo ratings yet
- Wind EnergyDocument8 pagesWind EnergyValenitnNo ratings yet
- Physics Investigatory Project: Pinaki Bandyopadhyay XII - C'Document20 pagesPhysics Investigatory Project: Pinaki Bandyopadhyay XII - C'Vipin SinghaiNo ratings yet
- Book MitutoyoDocument514 pagesBook MitutoyoPrajna Satya100% (1)
- HPLC Method Development and ValidationDocument8 pagesHPLC Method Development and ValidationSebastian LopezNo ratings yet
- PRW 2000 ManualDocument12 pagesPRW 2000 ManualMarian DicuNo ratings yet
- Steady-State Thermal Transmission Properties by Means of The Heat Flow Meter ApparatusDocument14 pagesSteady-State Thermal Transmission Properties by Means of The Heat Flow Meter ApparatusChandrasekar KrishnamurthyNo ratings yet
- General Science Grade 8 Student TextDocument74 pagesGeneral Science Grade 8 Student TextMahmud MohammedNo ratings yet
- دورات LS linearDocument30 pagesدورات LS linearAli OmarNo ratings yet
- Fluid Mechanics Lab Report 1 AliDocument10 pagesFluid Mechanics Lab Report 1 AliAli ArshadNo ratings yet
- Iso 1217 2009Document15 pagesIso 1217 2009Mahmoud HagrasNo ratings yet
- Datasheet 1N4001Document2 pagesDatasheet 1N4001Cyntia GodoyNo ratings yet
- Aquadopp Profiler 600 KHZDocument6 pagesAquadopp Profiler 600 KHZnardjiNo ratings yet
- Comp Plan Training PDF 3-2-2016Document10 pagesComp Plan Training PDF 3-2-2016srpntchrmrNo ratings yet
- Nala DischargesDocument19 pagesNala Discharges511fc965521197No ratings yet
- The Law of Entropy Invcrease - A Lab ExperimentDocument4 pagesThe Law of Entropy Invcrease - A Lab ExperimentINDUSTRIA BIOTECNOLÓGICA DEL SURNo ratings yet
- Sec 3 Chapter 5Document22 pagesSec 3 Chapter 5Edu 4 UNo ratings yet
- Exercises Lecture 2: The Standard AtmosphereDocument5 pagesExercises Lecture 2: The Standard AtmosphereJosé A. Montiel QuirósNo ratings yet
- ISO 286-1:2010 (E) : Table 1 - Values of Standard Tolerance Grades For Nominal Sizes Up To 3 150 MMDocument6 pagesISO 286-1:2010 (E) : Table 1 - Values of Standard Tolerance Grades For Nominal Sizes Up To 3 150 MMAleksandraNo ratings yet
- Applying Newtons LawDocument6 pagesApplying Newtons Lawminh hoàng nguyễnNo ratings yet
- HT Combitest 2019 SpecificationDocument3 pagesHT Combitest 2019 SpecificationAlbertofullHdNo ratings yet
- PH127 Lectures Nov. 2022 4Document212 pagesPH127 Lectures Nov. 2022 4dicksonjohnxpNo ratings yet
- Physics Dpp-5 EnglishDocument12 pagesPhysics Dpp-5 EnglishYogesh MalviyaNo ratings yet
- Work Power Mechanical EnergyDocument23 pagesWork Power Mechanical Energylynn vasquezNo ratings yet
- Hydraulic Stability of BPPT - Lock On Breakwater HeadDocument14 pagesHydraulic Stability of BPPT - Lock On Breakwater HeadDinar IstiyantoNo ratings yet
- Calculating Airflow Rates, Cooling Loads in Commercial KitchensDocument3 pagesCalculating Airflow Rates, Cooling Loads in Commercial KitchensSundar Ramasamy100% (1)
- GENERAL PHYSICS 2 - Q3 - Week 4Document27 pagesGENERAL PHYSICS 2 - Q3 - Week 4ariinnggg onichaNo ratings yet
- Iso 10052 - 2004 enDocument11 pagesIso 10052 - 2004 enElivania RibeiroNo ratings yet
- Relativistic Velocity Addition Law Derived From A Machine Gun Analogy and Time Dilation OnlyDocument6 pagesRelativistic Velocity Addition Law Derived From A Machine Gun Analogy and Time Dilation OnlyErmias MesfinNo ratings yet
- Chapter 6 Problem Set 2Document7 pagesChapter 6 Problem Set 2Vyomika TewaryNo ratings yet
- Civil 4th SEM SyllabusDocument176 pagesCivil 4th SEM SyllabusDIGBIJOY DEBNo ratings yet
- Sample Final Exam ProblemsDocument5 pagesSample Final Exam ProblemsDsfNo ratings yet