You might also like
- Báo Cáo Thực Tập Điều Khiển Tự ĐộngDocument18 pagesBáo Cáo Thực Tập Điều Khiển Tự ĐộngTriều NguyễnNo ratings yet
- Thi Gi Ữa Kỳ: Giảng viên ra đề: Người phê duyệtDocument6 pagesThi Gi Ữa Kỳ: Giảng viên ra đề: Người phê duyệtvyhoa118No ratings yet
- Dethi CSTD HK2 2122 DapanDocument6 pagesDethi CSTD HK2 2122 DapanPhúc Thành LạiNo ratings yet
- DapAn de Thi CT377 - Nhom1 - 21-22-HK1Document3 pagesDapAn de Thi CT377 - Nhom1 - 21-22-HK1Joe PhạmNo ratings yet
- Dap - An - de Thi - CSTD - GK1 - 1213nDocument5 pagesDap - An - de Thi - CSTD - GK1 - 1213nnttt2226No ratings yet
- De Thi Giua Hoc Ki 2 Toan 6 Sach Canh Dieu de 1Document7 pagesDe Thi Giua Hoc Ki 2 Toan 6 Sach Canh Dieu de 1Hoa NguyenNo ratings yet
- - ĐỀ KIỂM TRA GIỮA KÌ 2, TOÁN 6Document5 pages- ĐỀ KIỂM TRA GIỮA KÌ 2, TOÁN 6Yến NguyễnNo ratings yet
- De Thi Ch&Ncs - 2015 - Dot 1Document7 pagesDe Thi Ch&Ncs - 2015 - Dot 1Hai PhamNo ratings yet
- DT-Toán Cho K Sư 1 - Ngày 30-5-2022Document2 pagesDT-Toán Cho K Sư 1 - Ngày 30-5-2022Chí ĐạtNo ratings yet
- Dethi CSTD GK2 2021 L01Document2 pagesDethi CSTD GK2 2021 L01Phúc Thành LạiNo ratings yet
- DT-Toán Cho K Sư - Ngày 14-6-2023Document2 pagesDT-Toán Cho K Sư - Ngày 14-6-2023Thanh NguyenchiNo ratings yet
- Dethi - CSTD - GK1 - 2122 - CQ v2Document3 pagesDethi - CSTD - GK1 - 2122 - CQ v2buithikiemlien12c2No ratings yet
- Dethi CSTD GK1 2122 CQ DapanDocument7 pagesDethi CSTD GK1 2122 CQ Dapanbuithikiemlien12c2No ratings yet
- Dethi CSTD GK2 2122 L01 DapanDocument6 pagesDethi CSTD GK2 2122 L01 DapanThảo Đỗ Thị ThuNo ratings yet
- Nhóm2 - L08 - Báo Cáo Bu I 1Document43 pagesNhóm2 - L08 - Báo Cáo Bu I 1Minh Tuấn NguyễnNo ratings yet
- Dapan - DKTD - CLC - HK2 - 21 - 22Document5 pagesDapan - DKTD - CLC - HK2 - 21 - 22Phi Cao TanNo ratings yet
- 2014 2015Document8 pages2014 2015Tăng HàNo ratings yet
- 10594061029140623519Document6 pages10594061029140623519Ngọc ĐoanNo ratings yet
- CSDKTD GK2 0809Document5 pagesCSDKTD GK2 0809Nguyễn Hồng QuânNo ratings yet
- dấDocument14 pagesdấHuỳnh LưuNo ratings yet
- Bai04 - các Khâu Động Học Cơ BảnDocument15 pagesBai04 - các Khâu Động Học Cơ BảnPhạm Đình VõNo ratings yet
- Dapan CSTD Hk1 2223 v2Document5 pagesDapan CSTD Hk1 2223 v2Đinh HoàngNo ratings yet
- De Thi Hoc Ki 2 Toan 6 Sach Canh Dieu de 3Document6 pagesDe Thi Hoc Ki 2 Toan 6 Sach Canh Dieu de 3Hoa NguyenNo ratings yet
- KTGK 222 - ĐaDocument5 pagesKTGK 222 - ĐaPhát Nguyễn TrọngNo ratings yet
- 19B DSPDocument4 pages19B DSPHai Duong DinhNo ratings yet
- Co So Tu Dong Huynh Thai Hoang 409001 Dd1633 DT 409001 Dd1633 DT Dap An de Thi Cuoi Ky 1 2011 2012 (Cuuduongthancong - Com)Document9 pagesCo So Tu Dong Huynh Thai Hoang 409001 Dd1633 DT 409001 Dd1633 DT Dap An de Thi Cuoi Ky 1 2011 2012 (Cuuduongthancong - Com)huyhoang180103No ratings yet
- Dethi CK CSKTTD DHDTMT12hl D1 9 12 2019 hk1 2019 2020 De2Document3 pagesDethi CK CSKTTD DHDTMT12hl D1 9 12 2019 hk1 2019 2020 De2Thehoang PhanNo ratings yet
- BÀI TẬP CHƯƠNG 6 PDFDocument8 pagesBÀI TẬP CHƯƠNG 6 PDFDat DuNo ratings yet
- De Thi Hoc Ki 2 Mon Toan 7 KNTT de 1Document14 pagesDe Thi Hoc Ki 2 Mon Toan 7 KNTT de 1Ngô Phương ThảoNo ratings yet
- DT Toán kinh tế 2 ngày 24-7-2023-Ca sáng (Tham khảo)Document2 pagesDT Toán kinh tế 2 ngày 24-7-2023-Ca sáng (Tham khảo)huethanhptthNo ratings yet
- Đề thi toán 6 kết nối tri thứcDocument5 pagesĐề thi toán 6 kết nối tri thứctranvinhanhvnNo ratings yet
- ĐỀ ĐA HKII 16 17Document4 pagesĐỀ ĐA HKII 16 17To Minh HoangNo ratings yet
- mô hình hóa hệ liên tụcDocument7 pagesmô hình hóa hệ liên tụcHL music channelsNo ratings yet
- Lec3 Phan1 Block DiagramsDocument91 pagesLec3 Phan1 Block DiagramsThành Trần BáNo ratings yet
- De Thi Va Dap An DKNC HK2 1011Document5 pagesDe Thi Va Dap An DKNC HK2 1011small_chickNo ratings yet
- 003 - Toán vào 10 chuyên - Nam Định - 2018-2019Document6 pages003 - Toán vào 10 chuyên - Nam Định - 2018-2019Võ Thạch Đức TínNo ratings yet
- Trường Đại Học Bách Khoa Hà Nội Bộ Môn Điều Khiển Tự Động - Viện ĐiệnDocument21 pagesTrường Đại Học Bách Khoa Hà Nội Bộ Môn Điều Khiển Tự Động - Viện ĐiệnThang dducNo ratings yet
- Đề 6 (HK1-19-20)Document4 pagesĐề 6 (HK1-19-20)Phuc NguyenNo ratings yet
- Cấu Trúc Dữ Liệu Và Giải ThuậtDocument42 pagesCấu Trúc Dữ Liệu Và Giải ThuậtadjNo ratings yet
- De Thi Hoc Ki 2 Mon Toan 7 Canh DieuDocument10 pagesDe Thi Hoc Ki 2 Mon Toan 7 Canh DieuDat NguyenNo ratings yet
- De Thi Hkii 2022-2023 - PVDDocument4 pagesDe Thi Hkii 2022-2023 - PVDQuản Thanh PhongNo ratings yet
- Bài tập Chương 6Document11 pagesBài tập Chương 6giahuynguyen0603No ratings yet
- Báo Cáo TKT Nhóm 1Document18 pagesBáo Cáo TKT Nhóm 1AnnNo ratings yet
- Bai Giang DKTD - Chuong 5Document33 pagesBai Giang DKTD - Chuong 5Trung Võ Lê MinhNo ratings yet
- De Thi Giua Hoc Ki 1 Mon Toan Lop 7 de 2 3Document10 pagesDe Thi Giua Hoc Ki 1 Mon Toan Lop 7 de 2 3Công MinhNo ratings yet
- DeKTRobotCN HK1 2020Document8 pagesDeKTRobotCN HK1 2020Trần Tuấn AnhNo ratings yet
- Đề Và Đáp Án Chọn Đt Hy Ngày 1 - 2021-2022Document9 pagesĐề Và Đáp Án Chọn Đt Hy Ngày 1 - 2021-2022Hoàng Trung HiếuNo ratings yet
- Bai Giang DTNC - Chuong 1 - 28 - 05Document28 pagesBai Giang DTNC - Chuong 1 - 28 - 05Khang ĐinhNo ratings yet
- Bài tập ôn tậpDocument11 pagesBài tập ôn tập21151500No ratings yet
- Đề thi Toán kinh tế 2 CLC HK2-19-20 - Đề 6Document5 pagesĐề thi Toán kinh tế 2 CLC HK2-19-20 - Đề 6Vy Thảo0% (1)
- Cuu Duong Than Cong - Com: Câu 1: (2.5 Đ) Cho Trư C M CH T H P SauDocument2 pagesCuu Duong Than Cong - Com: Câu 1: (2.5 Đ) Cho Trư C M CH T H P SauPhát Nguyễn TrọngNo ratings yet
- 123doc de Xu Ly So Tin Hieu Co Dap An BK TPHCMDocument26 pages123doc de Xu Ly So Tin Hieu Co Dap An BK TPHCMDuy LêNo ratings yet
- De Thi hk2 Toan 9 Nam 2019 2020 Truong Thcs Doan Thi Diem TP HCMDocument6 pagesDe Thi hk2 Toan 9 Nam 2019 2020 Truong Thcs Doan Thi Diem TP HCMNguyễn Trà GiangNo ratings yet
- ĐÁP ÁN ĐỀ KT GIỮA KỲ 1. Năm học 2011-2012 Ngày thi: 25/10/2011 - o0oDocument6 pagesĐÁP ÁN ĐỀ KT GIỮA KỲ 1. Năm học 2011-2012 Ngày thi: 25/10/2011 - o0oLinh Trần Văn VươngNo ratings yet
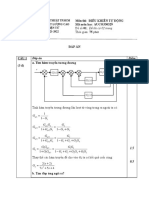
- Môn Thi: Điều Khiển Tự Động Mã môn học: AUCO330329Document6 pagesMôn Thi: Điều Khiển Tự Động Mã môn học: AUCO330329Vui Nguyễn NgọcNo ratings yet
- Đề Thi Cuối Kỳ XSTK 20152 Và Đáp Án (2 Đề)Document7 pagesĐề Thi Cuối Kỳ XSTK 20152 Và Đáp Án (2 Đề)Võ Hoài Nam100% (1)
- De Olympic 27 Thang 04 Toan 8 Nam 2022 2023 So GDDT Ba Ria Vung TauDocument5 pagesDe Olympic 27 Thang 04 Toan 8 Nam 2022 2023 So GDDT Ba Ria Vung Tauduyen121121012No ratings yet
- De GHK I Mon Toan 6 Canh Dieu de 1Document8 pagesDe GHK I Mon Toan 6 Canh Dieu de 1Le ThuanNo ratings yet