You might also like
- Giao Trinh Sap 2000Document70 pagesGiao Trinh Sap 2000khanhbk_03No ratings yet
- Bai Tap Robot (Nghia)Document22 pagesBai Tap Robot (Nghia)hophuong_dhvNo ratings yet
- Nội dung đề tàiDocument2 pagesNội dung đề tàiPhạm Như QuỳnhNo ratings yet
- (123doc) Do An Tinh Toan Thiet Ke Robot 4 Bac Tu DoDocument54 pages(123doc) Do An Tinh Toan Thiet Ke Robot 4 Bac Tu Dosegourney7419635.vnNo ratings yet
- 191634662 BAI TẬP LON ROBOTDocument22 pages191634662 BAI TẬP LON ROBOTLê Tuấn100% (1)
- Chuong 3 Dong Hoc ThuanDocument25 pagesChuong 3 Dong Hoc ThuanMaianh TranNo ratings yet
- Chương 04-01Document40 pagesChương 04-01Thanh DuyNo ratings yet
- Robot Công Nghiệp Và Cnc Nhóm 29: Tiểu Luận Môn HọcDocument13 pagesRobot Công Nghiệp Và Cnc Nhóm 29: Tiểu Luận Môn HọcPhương Hữu TụNo ratings yet
- Tuan 12Document5 pagesTuan 12Dự ĐinhNo ratings yet
- Báo Cáo Bài Tập Lớn Vật Lý 1Document8 pagesBáo Cáo Bài Tập Lớn Vật Lý 1G Linh100% (2)
- Scara 3 bậcDocument27 pagesScara 3 bậcHuy Bùi ĐứcNo ratings yet
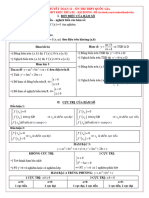
- TÓM TẮT LÝ THUYẾT TOÁN 12, NGUYỄN VƯƠN GDocument37 pagesTÓM TẮT LÝ THUYẾT TOÁN 12, NGUYỄN VƯƠN Gtranhongquan200612No ratings yet
- Chapter2 Edit03April2020Document144 pagesChapter2 Edit03April2020HenryNo ratings yet
- Robot TemplateDocument28 pagesRobot TemplateHuy PhạmNo ratings yet
- Robot Cong NghiepDocument8 pagesRobot Cong Nghiepsegourney7419635.vnNo ratings yet
- Nghiên Cứu Thiết Kế Cánh Tay Robot 6 Bậc Tự Do: Research Design Robot Arm 6 Degrees Of FreedomDocument7 pagesNghiên Cứu Thiết Kế Cánh Tay Robot 6 Bậc Tự Do: Research Design Robot Arm 6 Degrees Of FreedomChâu Huỳnh MinhNo ratings yet
- Kiemtra Cii 13-14 So 2Document3 pagesKiemtra Cii 13-14 So 2Tài LêNo ratings yet
- NguyenTatThanh Baocao Tiendo DoanCDTDocument27 pagesNguyenTatThanh Baocao Tiendo DoanCDTNguyễn Văn TàiNo ratings yet
- De thi-RBCN-CDTD17ABDocument6 pagesDe thi-RBCN-CDTD17ABThuong TranNo ratings yet
- (123doc) - Do-An-Thiet-Ke-He-Thong-Co-Dien-Tu-Robot-HarmoDocument35 pages(123doc) - Do-An-Thiet-Ke-He-Thong-Co-Dien-Tu-Robot-Harmothai doNo ratings yet
- 12 GTC2 B2 Hàm-Lũy-Thừa PDFDocument9 pages12 GTC2 B2 Hàm-Lũy-Thừa PDFPhuong Anh NguyenNo ratings yet
- 12 GTC2 B2 Hàm-Lũy-Thừa PDFDocument9 pages12 GTC2 B2 Hàm-Lũy-Thừa PDFPhuong Anh NguyenNo ratings yet
- Chapter 02Document6 pagesChapter 02NGỌC LUÂN ĐOÀNNo ratings yet
- Robot Cong Nghiep Ngan Hang Cau Hoi Robotcn (Cuuduongthancong - Com)Document11 pagesRobot Cong Nghiep Ngan Hang Cau Hoi Robotcn (Cuuduongthancong - Com)Trương Minh TrườngNo ratings yet
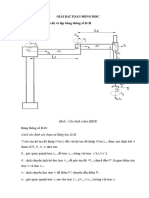
- Giải bài toán động học thuận, động học ngược, động lực họcDocument10 pagesGiải bài toán động học thuận, động học ngược, động lực họcLê Mạnh KhánhNo ratings yet
- Chu de Hs ĐB-NB 1.1 A1.2Document4 pagesChu de Hs ĐB-NB 1.1 A1.2Thắng RoyalNo ratings yet
- TOÀN BỘ LÝ THUYẾT 11 12Document10 pagesTOÀN BỘ LÝ THUYẾT 11 12Huyền Hân HồNo ratings yet
- Robot-Cong-Nghiep - Robot-&-Dktd - (Cuuduongthancong - Com)Document11 pagesRobot-Cong-Nghiep - Robot-&-Dktd - (Cuuduongthancong - Com)Layla VuNo ratings yet
- CẤU TRÚC NỘI DUNG VÀ KIẾN THỨC CƠ BẢN BẤT PHƯƠNG TRÌNH BẬC NHẤT HAI ẨNDocument3 pagesCẤU TRÚC NỘI DUNG VÀ KIẾN THỨC CƠ BẢN BẤT PHƯƠNG TRÌNH BẬC NHẤT HAI ẨNQuỳnh NhưNo ratings yet
- đại 12 - tiết 2Document3 pagesđại 12 - tiết 2hienmeomk1No ratings yet
- BT Phần Không Gian R NDocument10 pagesBT Phần Không Gian R NkhonghuuchauNo ratings yet
- 1 - TOAN-10 - B1 - C3 - HAM-SO - TU-LUAN - DE Khối 10ĐpDocument10 pages1 - TOAN-10 - B1 - C3 - HAM-SO - TU-LUAN - DE Khối 10ĐpVuu CanhhNo ratings yet
- L11 - Phân L P SVMDocument23 pagesL11 - Phân L P SVMnguyenhoai04102003No ratings yet
- 11 01 2024 Hàm số tiếpDocument2 pages11 01 2024 Hàm số tiếpdominh2004No ratings yet
- Robot Công Nghiệp Và Cnc: Tiểu Luận Môn HọcDocument8 pagesRobot Công Nghiệp Và Cnc: Tiểu Luận Môn HọcPhương Hữu TụNo ratings yet
- BT Toán Cao Cấp 1.HVDocument20 pagesBT Toán Cao Cấp 1.HVThươngNo ratings yet
- De2 3Document6 pagesDe2 3Anh Đinh ViệtNo ratings yet
- BT Tuần 9 - Biến Đổi LaplaceDocument3 pagesBT Tuần 9 - Biến Đổi LaplaceLong HảiNo ratings yet
- Hoàng Hải LongDocument3 pagesHoàng Hải Long5 GTANo ratings yet
- Chapter 02Document20 pagesChapter 02James VõNo ratings yet
- (123doc) - Thiet-Ke-Va-Mo-Phong-Robot-3d-Tren-Matlab-Kem-Code-MatlabDocument20 pages(123doc) - Thiet-Ke-Va-Mo-Phong-Robot-3d-Tren-Matlab-Kem-Code-Matlabbình nghuyễnNo ratings yet
- Bai Giang Lap Trinh CDocument102 pagesBai Giang Lap Trinh C12A8 - Đặng Lộc TàiNo ratings yet
- FILE 20220719 193315 Chuong-1-TSTDocument18 pagesFILE 20220719 193315 Chuong-1-TSTMinh KhuêNo ratings yet
- TGNN Đáp ÁnDocument45 pagesTGNN Đáp Ánthư lêNo ratings yet
- Lí Thuyết Tọa Độ Cực Trong Tích Phân KépDocument5 pagesLí Thuyết Tọa Độ Cực Trong Tích Phân KépTiến ĐạtNo ratings yet
- Ham So Bac HaiDocument15 pagesHam So Bac Hainhtienhung08No ratings yet
- 1.3. Tuyển Tập 150 Bài Tập Hàm Số Bậc Nhất Cơ Bản Và Nâng Cao Toán 9 - 2022 -2023Document46 pages1.3. Tuyển Tập 150 Bài Tập Hàm Số Bậc Nhất Cơ Bản Và Nâng Cao Toán 9 - 2022 -2023jeremy080402No ratings yet
- IB3 - HÀM SỐ MŨ, HÀM SỐ LOGARITDocument4 pagesIB3 - HÀM SỐ MŨ, HÀM SỐ LOGARITkatavnnnNo ratings yet
- PT Đư NG Tròn (TL)Document11 pagesPT Đư NG Tròn (TL)builanne1980No ratings yet
- (Đỗ Văn Đức) Thi Kscl Giữa Học Kỳ 1 - Toán Thầy Đức - ĐềDocument4 pages(Đỗ Văn Đức) Thi Kscl Giữa Học Kỳ 1 - Toán Thầy Đức - ĐềJennifer WatsonNo ratings yet
- Thiết kế robot - toànDocument30 pagesThiết kế robot - toànQuang TrườngNo ratings yet
- Chuong 4Document31 pagesChuong 4Long HoàngNo ratings yet
- Ung Dung Tin Hoc Trong Thiet KeDocument74 pagesUng Dung Tin Hoc Trong Thiet Kedang khoa nguyenNo ratings yet
- Tài liệu - Làm quen với đồ thị hàm sốDocument2 pagesTài liệu - Làm quen với đồ thị hàm sốdotuanvu0602No ratings yet
- 293-Article Text-878-1-10-20200419Document5 pages293-Article Text-878-1-10-2020041915. Nguyễn Thành NhânNo ratings yet
- L38 Nhom10Document13 pagesL38 Nhom10toan.nguyen203050No ratings yet
- M57 - Phát triển Tinh Tú IMO đặc biệt số 06Document5 pagesM57 - Phát triển Tinh Tú IMO đặc biệt số 06Thảo VyNo ratings yet
- LIVE5H - SỐ 07 - ĐƠN ĐIỆU HÀM SỐ CHỨA DẤU GIÁ TRỊ TUYỆT ĐỐIDocument2 pagesLIVE5H - SỐ 07 - ĐƠN ĐIỆU HÀM SỐ CHỨA DẤU GIÁ TRỊ TUYỆT ĐỐIMinh ĐỗNo ratings yet
- (Cô Ngọc Huyền LB) Đề thi KSCL định hướng lần 2 năm học 2021-2022 THPT Gia Lộc - Hải DươngDocument6 pages(Cô Ngọc Huyền LB) Đề thi KSCL định hướng lần 2 năm học 2021-2022 THPT Gia Lộc - Hải DươngVi NaNo ratings yet
- Hướng dẫn upload download chương trình PLC S7 1200Document5 pagesHướng dẫn upload download chương trình PLC S7 1200Đỗ QuânNo ratings yet
- Hướng Dẫn Mô Phỏng PLC SiemensDocument5 pagesHướng Dẫn Mô Phỏng PLC SiemensĐỗ QuânNo ratings yet
- FILE - 20200402 - 112023 - BAI-1-Những khái niệm cơ bản trong AutocadDocument43 pagesFILE - 20200402 - 112023 - BAI-1-Những khái niệm cơ bản trong AutocadĐỗ QuânNo ratings yet
- FILE - 20200402 - 112024 - BAI-4-Vẽ mạch lực và mạch điều khiểnDocument39 pagesFILE - 20200402 - 112024 - BAI-4-Vẽ mạch lực và mạch điều khiểnĐỗ QuânNo ratings yet
- BAI 5 Thực hành đấu nối mạch chạy 2 động cơ luân phiênDocument5 pagesBAI 5 Thực hành đấu nối mạch chạy 2 động cơ luân phiênĐỗ QuânNo ratings yet
- BAI 4 Thực hành đấu nối mạch đảo chiều động cơ khởi động sao tam giác PDFDocument12 pagesBAI 4 Thực hành đấu nối mạch đảo chiều động cơ khởi động sao tam giác PDFĐỗ QuânNo ratings yet
- BAI 2 Giới thiệu các loại khí cụ điện điều khiểnDocument15 pagesBAI 2 Giới thiệu các loại khí cụ điện điều khiểnĐỗ Quân0% (1)
- BAI 3 Đ NG Cơ Không Đ NG B 3 PhaDocument10 pagesBAI 3 Đ NG Cơ Không Đ NG B 3 PhaĐỗ QuânNo ratings yet
- BAI 1 Giới thiệu các loại khí cụ điện đóng cắt bảo vệ PDFDocument22 pagesBAI 1 Giới thiệu các loại khí cụ điện đóng cắt bảo vệ PDFĐỗ QuânNo ratings yet
- DC AC 1phase PDFDocument39 pagesDC AC 1phase PDFĐỗ QuânNo ratings yet
- bao cao nop thầy phươngDocument52 pagesbao cao nop thầy phươngĐỗ QuânNo ratings yet
- nghịch-lưu-3-pha-độc-lập-trên-dq-đã chuyển đổiDocument30 pagesnghịch-lưu-3-pha-độc-lập-trên-dq-đã chuyển đổiĐỗ QuânNo ratings yet
- 326859523 Thiết Kế Điều Khiển Hệ Thống Năng Lượng Mặt Trời Nối Lưới PDFDocument88 pages326859523 Thiết Kế Điều Khiển Hệ Thống Năng Lượng Mặt Trời Nối Lưới PDFĐỗ QuânNo ratings yet
- Flyback Converter PDFDocument32 pagesFlyback Converter PDFCboy Tuan Anh100% (11)
- Báo Cáo Đ Án 2Document69 pagesBáo Cáo Đ Án 2Đỗ QuânNo ratings yet