You might also like
- Repair KIt Instructions Bixby Energy SystemsDocument89 pagesRepair KIt Instructions Bixby Energy SystemsAl Malley70% (10)
- Gas Lift DataDocument37 pagesGas Lift DatavissusamuraiNo ratings yet
- PEO Exam Timetable December 2017Document29 pagesPEO Exam Timetable December 2017ming_zhu10No ratings yet
- Question Papers Dec 2018 For FETDocument660 pagesQuestion Papers Dec 2018 For FETDharam PatelNo ratings yet
- 15 Is-0155 - Ps - Avocet - Production - Operations - SoftwareDocument2 pages15 Is-0155 - Ps - Avocet - Production - Operations - Softwareboualem.iniNo ratings yet
- Reservoir ManagementDocument67 pagesReservoir ManagementSajad FalahNo ratings yet
- Project and Planning Management (MID-Exams)Document8 pagesProject and Planning Management (MID-Exams)Mahtab SajnaniNo ratings yet
- Pub20025871 A Eng GBDocument11 pagesPub20025871 A Eng GBJulio FernandoNo ratings yet
- A Novel Scheme For Accurate Remaining Useful Life Prediction For Industrial IoTs by Using Deep Neural NetworkDocument9 pagesA Novel Scheme For Accurate Remaining Useful Life Prediction For Industrial IoTs by Using Deep Neural NetworkAdam HansenNo ratings yet
- Coal Mine Field Trip ReportDocument14 pagesCoal Mine Field Trip Reportvictory shahbazNo ratings yet
- Eclipse Project - Black GorudoDocument20 pagesEclipse Project - Black GorudoEsther LimNo ratings yet
- Reservoir Surveillance......Document51 pagesReservoir Surveillance......Nindy Sherli ParamitaNo ratings yet
- User Guide of Reservoir Geological Modeling: 1 Quick LookDocument48 pagesUser Guide of Reservoir Geological Modeling: 1 Quick LookMustapha BouregaaNo ratings yet
- Fuzzy Logic: AssignmentDocument8 pagesFuzzy Logic: AssignmentChirag GautamNo ratings yet
- 8dc2 PDFDocument21 pages8dc2 PDFOpuba Christian0% (1)
- Mustafa Jaber Ali - Water-Alternating-Gas (WAG)Document17 pagesMustafa Jaber Ali - Water-Alternating-Gas (WAG)Thana AsradNo ratings yet
- Ayush - Tiwari - DIT - University - SUMMER-INTERNSHIP-REPORT (2019) (1) - 1Document54 pagesAyush - Tiwari - DIT - University - SUMMER-INTERNSHIP-REPORT (2019) (1) - 1ayush rajNo ratings yet
- Reservoir Sizing MethodsDocument3 pagesReservoir Sizing MethodskatoNo ratings yet
- Fuzzy, Neural and Neuro-Fuzzy Controllers For An Inverted PendulumDocument6 pagesFuzzy, Neural and Neuro-Fuzzy Controllers For An Inverted PendulumErnesto Leon0% (1)
- Spreadsheet Determines Hyperbolic-Decline Parameters - Oil & Gas JournalDocument5 pagesSpreadsheet Determines Hyperbolic-Decline Parameters - Oil & Gas JournalWassef MBNo ratings yet
- CMG 1Document37 pagesCMG 1Marlyndah MakaleNo ratings yet
- Fundamentals of Numerical Reservoir Simulation Differential EquationsDocument48 pagesFundamentals of Numerical Reservoir Simulation Differential EquationsAkhil GodavarthiNo ratings yet
- Multiphase Pump and The Benefits To Oil and Gas ProductionDocument4 pagesMultiphase Pump and The Benefits To Oil and Gas ProductionOlusegun OyebanjiNo ratings yet
- Cyclic Steam Stimulation Thermal EOR ProcessDocument48 pagesCyclic Steam Stimulation Thermal EOR ProcessMohamed ElkumatiNo ratings yet
- OfficeDocument40 pagesOfficeTarek HassanNo ratings yet
- Reservoir Test ExampleDocument5 pagesReservoir Test ExampleNicholas GawanNo ratings yet
- Software CMG HighlightsDocument16 pagesSoftware CMG HighlightsAndyPaezNo ratings yet
- Module 14 - Submersible Pump - LectDocument40 pagesModule 14 - Submersible Pump - LectmahmoudNo ratings yet
- Opus Terra - PUNQS3Document27 pagesOpus Terra - PUNQS3Binu KaaniNo ratings yet
- Economic Considerations in Material DesignDocument27 pagesEconomic Considerations in Material DesignmaterialmindedNo ratings yet
- Lectures On Well Testing 1ADocument37 pagesLectures On Well Testing 1APatrick KariukiNo ratings yet
- MPDFDocument4 pagesMPDFAnonymous lHPNwB3VNo ratings yet
- Kel-1 GAs Lift1Document12 pagesKel-1 GAs Lift1Indra ArdiansyahNo ratings yet
- Methodological Approach For Reservoir Simulation PDFDocument7 pagesMethodological Approach For Reservoir Simulation PDFAiwarikiaarNo ratings yet
- Chapter 2-Reservoir SystemDocument44 pagesChapter 2-Reservoir SystemKaoru AmaneNo ratings yet
- SPE-14098-PA Raghavan Well-Test Analysis For Multiphase FlowDocument10 pagesSPE-14098-PA Raghavan Well-Test Analysis For Multiphase FlowLorena CamposNo ratings yet
- Heat Transfer: (Meng 3121)Document52 pagesHeat Transfer: (Meng 3121)HASSAN ARSHADNo ratings yet
- White Paper 2014-5-01 Diesel Displacement FinalDocument8 pagesWhite Paper 2014-5-01 Diesel Displacement Finalziko23No ratings yet
- Production Decline AnalysisDocument10 pagesProduction Decline AnalysisDing J. LimNo ratings yet
- Thermo Scientific Nicolet Is10 FT-IR SpectrometerDocument4 pagesThermo Scientific Nicolet Is10 FT-IR SpectrometerEmanuelNo ratings yet
- Streamline Technology Reservoir History Matching and Forecasting PDFDocument5 pagesStreamline Technology Reservoir History Matching and Forecasting PDFTheNourEldenNo ratings yet
- Viscosity Prediction of Kuwaiti Heavy Crudes at Elevated Temperatures PDFDocument18 pagesViscosity Prediction of Kuwaiti Heavy Crudes at Elevated Temperatures PDFJaime A PolancoNo ratings yet
- Project Financial Evaluation: Introduction To Financial Figures of MeritDocument5 pagesProject Financial Evaluation: Introduction To Financial Figures of MeritjupadhyayNo ratings yet
- Building a Black Oil ModelDocument15 pagesBuilding a Black Oil ModelAnonymous 0QHl5rz91No ratings yet
- Hesham Mokhtar Ali Senior Reservoir Engineer 2021: In/heshammokhtaraliDocument7 pagesHesham Mokhtar Ali Senior Reservoir Engineer 2021: In/heshammokhtaraliAlamen GandelaNo ratings yet
- DDocument15 pagesDJuan Lopez100% (2)
- Maximising Oil Recovery Through Reservoir SimulationDocument51 pagesMaximising Oil Recovery Through Reservoir SimulationYukiNo ratings yet
- Setting Up A Reservoir Simulation ModelDocument30 pagesSetting Up A Reservoir Simulation ModelMariam Tatty LeonNo ratings yet
- Reservoir Fluid PropertiesDocument9 pagesReservoir Fluid PropertiesAnonymous LLLK3pqNo ratings yet
- Slides 1Document32 pagesSlides 1miss1whateverNo ratings yet
- Kadanwari PDFDocument13 pagesKadanwari PDFAbdul AliNo ratings yet
- FIELD UCSI GRID DATADocument33 pagesFIELD UCSI GRID DATAAkmuhammet MammetjanovNo ratings yet
- 03 CGE616 Miscible Displacement Process OCT2016Document111 pages03 CGE616 Miscible Displacement Process OCT2016adib assoliNo ratings yet
- IPR-RESERVOIR FLUID FLOWDocument34 pagesIPR-RESERVOIR FLUID FLOWAvanti NurNo ratings yet
- 8 Dynamic Uncertainty AnalysisDocument9 pages8 Dynamic Uncertainty Analysismangkoti100% (1)
- Eor MethodsDocument32 pagesEor MethodsSuleiman BaruniNo ratings yet
- AF EORs GenDocument22 pagesAF EORs GenNurfathiah ShahraniNo ratings yet
- Ok 1 IntroGenCBDocument20 pagesOk 1 IntroGenCBAli HosseiniNo ratings yet
- Public Version PDFDocument334 pagesPublic Version PDFKira JonahNo ratings yet
- PETSOC 09-07-18.PDF Gas Condensate Reservoir PerformanceDocument7 pagesPETSOC 09-07-18.PDF Gas Condensate Reservoir Performanceswaala4real0% (1)
- Hydrocarbon Fluid Inclusions in Petroliferous BasinsFrom EverandHydrocarbon Fluid Inclusions in Petroliferous BasinsNo ratings yet
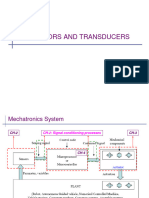
- CH-2 SensorsDocument55 pagesCH-2 Sensorsdagimawgchew777No ratings yet
- Chapter 3 Sensors and Transducers-12Document71 pagesChapter 3 Sensors and Transducers-12mekinjemal999No ratings yet
- Inflow Performance Relationship (Ipr)Document19 pagesInflow Performance Relationship (Ipr)Mahtab SajnaniNo ratings yet
- 7.productivity Index With Problems PDFDocument17 pages7.productivity Index With Problems PDFMahtab SajnaniNo ratings yet
- Flow Initiationswabbing Reverse Circulation Coil TubingDocument17 pagesFlow Initiationswabbing Reverse Circulation Coil TubingMahtab SajnaniNo ratings yet
- Energies 12 01469Document28 pagesEnergies 12 01469Mahtab SajnaniNo ratings yet
- Sensors and ActuatorsDocument31 pagesSensors and ActuatorsrameshsmeNo ratings yet
- PPMDocument11 pagesPPMMahtab SajnaniNo ratings yet
- Vogel IPRDocument26 pagesVogel IPRMahtab SajnaniNo ratings yet
- 480 SensorsDocument21 pages480 SensorsAbdulrahman AlsalawiNo ratings yet
- Presentation 3Document11 pagesPresentation 3Mahtab SajnaniNo ratings yet
- Bingham Yield SlurryDocument124 pagesBingham Yield SlurryAnonymous K3FaYFlNo ratings yet
- Name: Muhammad Umar. ROLL NO: F16PG115. Subject: Ppm. Subject Teacher: Sir Abdul Qadir. Topic: Introduction To Project Cost ManagementDocument9 pagesName: Muhammad Umar. ROLL NO: F16PG115. Subject: Ppm. Subject Teacher: Sir Abdul Qadir. Topic: Introduction To Project Cost ManagementMahtab SajnaniNo ratings yet
- PETR 6362 Summer 2019 Reservoir Engineering 1 EOR NotesDocument31 pagesPETR 6362 Summer 2019 Reservoir Engineering 1 EOR NotesMahtab SajnaniNo ratings yet
- PPM Mahesh Kumar F16PG05Document6 pagesPPM Mahesh Kumar F16PG05Mahtab SajnaniNo ratings yet
- Name: Muhammad Umar. ROLL NO: F16PG115. Subject: Ppm. Subject Teacher: Sir Abdul Qadir. Topic: Introduction To Project Cost ManagementDocument9 pagesName: Muhammad Umar. ROLL NO: F16PG115. Subject: Ppm. Subject Teacher: Sir Abdul Qadir. Topic: Introduction To Project Cost ManagementMahtab SajnaniNo ratings yet
- Mehran University of Engineering & Technology Jamshoro: Name: Muswar MithalDocument7 pagesMehran University of Engineering & Technology Jamshoro: Name: Muswar MithalMahtab SajnaniNo ratings yet
- Mehran University of Engineering & Technology JamshoroDocument6 pagesMehran University of Engineering & Technology JamshoroMahtab SajnaniNo ratings yet
- Mid-Exam (PPM)Document5 pagesMid-Exam (PPM)Mahtab SajnaniNo ratings yet
- Project Planning and Management: Mid-Term ExamDocument10 pagesProject Planning and Management: Mid-Term ExamMahtab SajnaniNo ratings yet
- Project PlanningDocument9 pagesProject PlanningMahtab SajnaniNo ratings yet
- Mehran University of Engineering & Technology Jamshoro: Name: Muswar MithalDocument7 pagesMehran University of Engineering & Technology Jamshoro: Name: Muswar MithalMahtab SajnaniNo ratings yet
- Macroscopic Displacement and Areal Sweep EfficiencyDocument41 pagesMacroscopic Displacement and Areal Sweep EfficiencyMahtab SajnaniNo ratings yet
- Shadab Ali Gadahi - F16Pg37 - Group-Ii Submit To: Engr. Abdul Qadir ShaikhDocument8 pagesShadab Ali Gadahi - F16Pg37 - Group-Ii Submit To: Engr. Abdul Qadir ShaikhMahtab SajnaniNo ratings yet
- PPMDocument11 pagesPPMMahtab SajnaniNo ratings yet
- Name: Muhammad Umar. ROLL NO: F16PG115. Subject: Ppm. Subject Teacher: Sir Abdul Qadir. Topic: Introduction To Project Cost ManagementDocument9 pagesName: Muhammad Umar. ROLL NO: F16PG115. Subject: Ppm. Subject Teacher: Sir Abdul Qadir. Topic: Introduction To Project Cost ManagementMahtab SajnaniNo ratings yet
- Name: Mohammmad Ahmed Khan Roll No: F16PG123 Subject:Project Planning and ManagementDocument7 pagesName: Mohammmad Ahmed Khan Roll No: F16PG123 Subject:Project Planning and ManagementMahtab SajnaniNo ratings yet
- Assingment of Project Planning and Management 1Document7 pagesAssingment of Project Planning and Management 1Mahtab SajnaniNo ratings yet
- Name:: Syed Zegham AbbasDocument7 pagesName:: Syed Zegham AbbasMahtab SajnaniNo ratings yet
- Presentation 17Document10 pagesPresentation 17Mahtab SajnaniNo ratings yet
- Boilermaker Practice ExamDocument8 pagesBoilermaker Practice ExamSastoe DubeNo ratings yet
- 1 2020 ROW CatalogDocument214 pages1 2020 ROW CatalogBryan BaringNo ratings yet
- AI MI Catalogue - A4 PDFDocument26 pagesAI MI Catalogue - A4 PDFAbhishek SinhaNo ratings yet
- Annex 1 - F35 GIS Type Test SummaryDocument6 pagesAnnex 1 - F35 GIS Type Test SummaryMauricio Baño RíosNo ratings yet
- PT. Trakindo Utama: Service Parts Requisition 4.3Document10 pagesPT. Trakindo Utama: Service Parts Requisition 4.3rahmat sanusiNo ratings yet
- Technical Offer Material PIX-12 - PT Fegasus Inti SejahteraDocument2 pagesTechnical Offer Material PIX-12 - PT Fegasus Inti SejahteraRaka ArdhiansyahNo ratings yet
- Motors ACDocument5 pagesMotors ACkoniks519No ratings yet
- 8000-4 Parts ListDocument19 pages8000-4 Parts ListAstraluxNo ratings yet
- Dryer ED52Document31 pagesDryer ED52Bryce Turner100% (1)
- NC Tool StorageDocument6 pagesNC Tool StorageabhayiimcNo ratings yet
- 014-MS For General Scaffolding PDFDocument33 pages014-MS For General Scaffolding PDFKöksal Patan100% (2)
- N700E 5,5 375kW EngDocument113 pagesN700E 5,5 375kW EngAbdulrahmanNo ratings yet
- Packaged Air Conditioners Duct Connection Type: FDY-KA SeriesDocument91 pagesPackaged Air Conditioners Duct Connection Type: FDY-KA Seriesjof853No ratings yet
- 7PG21 Solkor RF Technical Manual Chapter 6 Commissioning PDFDocument21 pages7PG21 Solkor RF Technical Manual Chapter 6 Commissioning PDFmarkgaloNo ratings yet
- AVS Brochure PDFDocument2 pagesAVS Brochure PDFbalab2311No ratings yet
- 300 Watt Xenon Power Supplies: CEP301 SeriesDocument3 pages300 Watt Xenon Power Supplies: CEP301 SeriesDavidCoriaNo ratings yet
- SCX-4600/4623 Series Parts CatalogDocument60 pagesSCX-4600/4623 Series Parts Catalogpab39xNo ratings yet
- REDLION - DSP-ZR Product ManualDocument8 pagesREDLION - DSP-ZR Product ManualJorge_Andril_5370No ratings yet
- I RoboDocument40 pagesI RoboTuấn NguyễnNo ratings yet
- 21823.0 Appendix RBC1100 - LX449 V1 - 0Document8 pages21823.0 Appendix RBC1100 - LX449 V1 - 0roozbehxoxNo ratings yet
- TMM Hospital at Thiruvalla. Approved Make of Materials For Fire Protection SystemDocument2 pagesTMM Hospital at Thiruvalla. Approved Make of Materials For Fire Protection SystemMC EstimationNo ratings yet
- DS PRK3BstandardEL en 50105364Document6 pagesDS PRK3BstandardEL en 50105364Artemis StateNo ratings yet
- Swagelok B-600-1-4Document2 pagesSwagelok B-600-1-4Xuân Định LêNo ratings yet
- Ema Hydraulic 1Document8 pagesEma Hydraulic 1Nikola AngjelkovskiNo ratings yet
- 275HDV High Voltage DetectorDocument5 pages275HDV High Voltage DetectorByron PanchiNo ratings yet
- Kebutuhan Peralatan Raktek Paket Keahlian Multimedia Tahun Pelajaran 2020 Jumlah Siswa KeseluruhanDocument2 pagesKebutuhan Peralatan Raktek Paket Keahlian Multimedia Tahun Pelajaran 2020 Jumlah Siswa KeseluruhannugrohoNo ratings yet
- Regulation Pompe Sauer Danfos Series 90Document2 pagesRegulation Pompe Sauer Danfos Series 90ezeazeazeaeNo ratings yet
- 32-31-74 Rev 8 MLG ActuatorDocument88 pages32-31-74 Rev 8 MLG ActuatorMartin RicciutiNo ratings yet