You might also like
- ME-311 Machine Design - Lecture 6Document17 pagesME-311 Machine Design - Lecture 6Muhammad Zun Nooren BangashNo ratings yet
- ME301chapter10 PDFDocument28 pagesME301chapter10 PDFPablo De Lera RodríguezNo ratings yet
- 10.mechanica..l SpringsDocument149 pages10.mechanica..l SpringsAekkasit SenaartNo ratings yet
- Analysis of Internal Expanding Rim Clutches & BrakesDocument20 pagesAnalysis of Internal Expanding Rim Clutches & BrakesALINo ratings yet
- x14 Statics - Frames and MachinesDocument24 pagesx14 Statics - Frames and Machinessuniljha121No ratings yet
- Multiplate ClutchDocument29 pagesMultiplate ClutchStefan ArichtaNo ratings yet
- Principles of Gas Nitriding 2Document13 pagesPrinciples of Gas Nitriding 2anhntran4850No ratings yet
- ME-311 Machine Design - Lecture 3Document27 pagesME-311 Machine Design - Lecture 3Muhammad Zun Nooren BangashNo ratings yet
- Topic:-Design Analysis of Curved Beam,: Crank Hook and C ClampDocument11 pagesTopic:-Design Analysis of Curved Beam,: Crank Hook and C ClampKartik YadavNo ratings yet
- Machine Design Basics and FormulasDocument26 pagesMachine Design Basics and FormulasAnirudhgandhi RavipalliNo ratings yet
- 02 Internal Expanding BrakeDocument26 pages02 Internal Expanding Brakeahmed albeekNo ratings yet
- Design of Machine Elements: Muhammad Ilyas, PHDDocument32 pagesDesign of Machine Elements: Muhammad Ilyas, PHDumer JuttNo ratings yet
- 4 Failure CriteriaDocument43 pages4 Failure Criteriaali381No ratings yet
- Pages From Hyundai Welding Handbook (2006)Document1 pagePages From Hyundai Welding Handbook (2006)tuatkNo ratings yet
- Failure - Static LoadingDocument183 pagesFailure - Static LoadingHunain QaziNo ratings yet
- Slab Analysis: 7.1 Sheet DrawingDocument21 pagesSlab Analysis: 7.1 Sheet DrawingRyan RafaelNo ratings yet
- Mechanical DesignDocument51 pagesMechanical DesignsafaozhanNo ratings yet
- 5b-Design of Welded JointsDocument45 pages5b-Design of Welded JointsSOUBHIK ROYNo ratings yet
- Gear Heat TreatmentDocument13 pagesGear Heat TreatmentvishalNo ratings yet
- 353 35435 ME357 2011 4 2 1 Sheet MD2Document10 pages353 35435 ME357 2011 4 2 1 Sheet MD2adel nabhanNo ratings yet
- TorsionDocument51 pagesTorsionsolaNo ratings yet
- Origo - Mig - 410-510 - 0349 301 159Document49 pagesOrigo - Mig - 410-510 - 0349 301 159capacitacionNo ratings yet
- Mae 456 Finite Element Analysis EXAM 1 Practice Questions NameDocument13 pagesMae 456 Finite Element Analysis EXAM 1 Practice Questions NamechellamvNo ratings yet
- Fluid StaticsDocument30 pagesFluid StaticsIVY TING WEI WEI MoeNo ratings yet
- Chapter 3 brakes analysisDocument37 pagesChapter 3 brakes analysiskibromgidey12No ratings yet
- Metal Cutting Theory Problems SolvedDocument12 pagesMetal Cutting Theory Problems SolvedZohaib RafiqNo ratings yet
- Stress Concentration, Theoretical Stress Concentration Factor, Notch Sensitivity FactorDocument64 pagesStress Concentration, Theoretical Stress Concentration Factor, Notch Sensitivity FactorShiva TejNo ratings yet
- Spring DesignDocument26 pagesSpring DesignNeelkanth BenadeNo ratings yet
- PDF Friction - Chapter 3Document17 pagesPDF Friction - Chapter 3Loranie SulukangNo ratings yet
- CurveDocument19 pagesCurveSheryll de GuzmanNo ratings yet
- Gears PresentationDocument33 pagesGears PresentationNaveen YadavNo ratings yet
- Statics Exam 3Document7 pagesStatics Exam 3Oussama HarbNo ratings yet
- Lecture Static FailureDocument6 pagesLecture Static FailureKelly MooneyNo ratings yet
- L - Universal or Hooke's JointDocument21 pagesL - Universal or Hooke's JointAditya Shubham GargNo ratings yet
- Example DIN743 Bbl1Document7 pagesExample DIN743 Bbl1dd hhNo ratings yet
- IIT Guhati Note Continuum MechanicsDocument254 pagesIIT Guhati Note Continuum MechanicsRahul KarnaNo ratings yet
- Relationship between angle of twist, torque, length and diameterDocument6 pagesRelationship between angle of twist, torque, length and diameterAhsan MumtazNo ratings yet
- Udvs Jddfej ML @LDocument1 pageUdvs Jddfej ML @LkhocineNo ratings yet
- Solucao OxfordDocument12 pagesSolucao OxfordLeonardo DuarteNo ratings yet
- 022 Static Surface Forces (1) SDocument54 pages022 Static Surface Forces (1) SMayur PatelNo ratings yet
- 15me53 Important Questions Paper-3Document3 pages15me53 Important Questions Paper-3Karthi SiddhNo ratings yet
- Tutorial Questions 4523Document29 pagesTutorial Questions 4523Toby Joseph ThomasNo ratings yet
- Clutches Brakes and DynamometersDocument62 pagesClutches Brakes and DynamometersIrfan Shaikh50% (2)
- Phase TransformationDocument50 pagesPhase TransformationJitenderNo ratings yet
- Structural Analysis of Crane HookDocument5 pagesStructural Analysis of Crane HookAkesh KakarlaNo ratings yet
- Chapter 3Document30 pagesChapter 3Victoria JungNo ratings yet
- Cone ClutchDocument5 pagesCone ClutchDinesh Chahal100% (1)
- APPLIED MECHANICS Paper 2Document4 pagesAPPLIED MECHANICS Paper 2FOFUH RONALD NCHEGEH100% (1)
- Therefore, the principal stresses are:σ1 = 110 MPa (maximum principal stress)σ2 = 0 MPa (minimum principal stress)The principal planes make an angle of θp1 = -23.7° and θp2 = 66.3° from the x-axisDocument55 pagesTherefore, the principal stresses are:σ1 = 110 MPa (maximum principal stress)σ2 = 0 MPa (minimum principal stress)The principal planes make an angle of θp1 = -23.7° and θp2 = 66.3° from the x-axisAfif Azhar100% (1)
- Fracture MechanicsDocument12 pagesFracture MechanicsSANTOSH KUMARNo ratings yet
- Torsion Shaft DesignDocument24 pagesTorsion Shaft DesignHARSHWARDHAN SINGH SENGARNo ratings yet
- Formula Sheet For Exam 1Document1 pageFormula Sheet For Exam 1chris ricaNo ratings yet
- HW5 SolDocument11 pagesHW5 Solondutz33% (3)
- ME-311 Machine Design: Instructor: Dr. Samiur Rahman ShahDocument10 pagesME-311 Machine Design: Instructor: Dr. Samiur Rahman ShahMuhammad Zun Nooren BangashNo ratings yet
- ME-311 Machine Design: Instructor: Dr. Samiur Rahman ShahDocument9 pagesME-311 Machine Design: Instructor: Dr. Samiur Rahman ShahMuhammad Zun Nooren BangashNo ratings yet
- CH 10: Mechanical Springs: Stresses in Helical SpringsDocument8 pagesCH 10: Mechanical Springs: Stresses in Helical SpringsFranklyn kipkuruiNo ratings yet
- 11 SpringsDocument19 pages11 SpringsCarl CrawfordNo ratings yet
- Wire Springs, - Flat Springs, or - Special ShapedDocument25 pagesWire Springs, - Flat Springs, or - Special Shapedbiruk tolossaNo ratings yet
- Me 301 Chapter 10Document28 pagesMe 301 Chapter 10Melissa RokaNo ratings yet
- Centrifugal Pump CharacteristicsDocument16 pagesCentrifugal Pump CharacteristicsHannan AyubNo ratings yet
- Energy Losses in Bends and Fittings Lab ReportDocument7 pagesEnergy Losses in Bends and Fittings Lab ReportHannan AyubNo ratings yet
- Beam Deflection Testing MachineDocument6 pagesBeam Deflection Testing MachineHannan AyubNo ratings yet
- Discharge CoefficientDocument5 pagesDischarge CoefficientHannan AyubNo ratings yet
- Lab 6 ReportDocument8 pagesLab 6 ReportHannan AyubNo ratings yet
- Torsion Experiment AnalysisDocument8 pagesTorsion Experiment AnalysisHannan AyubNo ratings yet
- Lab 4 ReportDocument7 pagesLab 4 ReportHannan AyubNo ratings yet
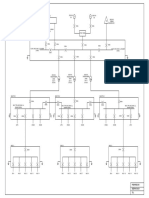
- Conceptual SLDDocument1 pageConceptual SLDakhilNo ratings yet
- Surgical Methods of MTPDocument44 pagesSurgical Methods of MTPRajeev Sood100% (1)
- DAPUS TINPUS - WPS OfficeDocument3 pagesDAPUS TINPUS - WPS OfficeSilvana NurulfauziyyahNo ratings yet
- JW1782BDocument13 pagesJW1782BGustavo AlonsoNo ratings yet
- Angles of Elevation and Depression, Bearings NotesDocument4 pagesAngles of Elevation and Depression, Bearings Notesroddyeal100% (2)
- Specifications Models 37R116, 37R118 and 43R175: Carry Capacity: 18,200 To 47,200 Lbs (8250 To 21,400 KG.)Document7 pagesSpecifications Models 37R116, 37R118 and 43R175: Carry Capacity: 18,200 To 47,200 Lbs (8250 To 21,400 KG.)Marek WyszatyckiNo ratings yet
- What Are The Different Types of PollutionDocument9 pagesWhat Are The Different Types of PollutionPatricia DurandNo ratings yet
- GY HM 100 Service ManualDocument36 pagesGY HM 100 Service Manualvideoengr100% (1)
- UTHM Construction Safety Group AssignmentDocument19 pagesUTHM Construction Safety Group AssignmentWan Muhammad Faiz Bin Mohd RoslanNo ratings yet
- Unit 1 Purva Swadhyaya QuestionsDocument4 pagesUnit 1 Purva Swadhyaya QuestionsSurrender to Krishna AlwaysNo ratings yet
- ABC Oilfield Services Emergency Drill RecordDocument1 pageABC Oilfield Services Emergency Drill RecordJaijeev PaliNo ratings yet
- Comprehension Y9aDocument9 pagesComprehension Y9angwenping5No ratings yet
- Pneumatic System and Basic Valve UsedDocument401 pagesPneumatic System and Basic Valve Usedtarang srivasNo ratings yet
- How Elevator Is Made - Used, Parts, Dimensions, Structure, Machine, Design, Raw Materials PDFDocument4 pagesHow Elevator Is Made - Used, Parts, Dimensions, Structure, Machine, Design, Raw Materials PDFpersephoniseNo ratings yet
- Site Mobilisation ManagementDocument12 pagesSite Mobilisation ManagementmizaNo ratings yet
- BINALAY VS ManaloDocument3 pagesBINALAY VS ManaloAnonymous 7BpT9OWPNo ratings yet
- 1,2,4-Triazoles: A Review of Synthetic Approaches and The Biological ActivityDocument22 pages1,2,4-Triazoles: A Review of Synthetic Approaches and The Biological Activitymf720383270No ratings yet
- A ETHICS-101 Activity-3Document3 pagesA ETHICS-101 Activity-3Liz FuentesNo ratings yet
- E420 S1100 Fact SheetDocument7 pagesE420 S1100 Fact Sheetiskandarn_el5735No ratings yet
- Meng 2nd Year Death Anniversary MassDocument6 pagesMeng 2nd Year Death Anniversary Massjoy in the spirit of the lordNo ratings yet
- Australian F1 SUBMACHINE GUNDocument4 pagesAustralian F1 SUBMACHINE GUNCaprikorn100% (4)
- Chiller Maintenance Service 2015Document29 pagesChiller Maintenance Service 2015Huong Ban MaiNo ratings yet
- Learning Activity Sheet In: Computer Systems ServicingDocument12 pagesLearning Activity Sheet In: Computer Systems ServicingCarvalds 0315No ratings yet
- Printing MachineDocument2 pagesPrinting MachinephamdoanketNo ratings yet
- Cja YDocument18 pagesCja YC-jay PizarraNo ratings yet
- Mine Pool AtlasDocument172 pagesMine Pool AtlasRishiraj SahooNo ratings yet
- Chords ListDocument5 pagesChords ListakshayNo ratings yet
- Supply Chain Vision in Pharma IndustryDocument20 pagesSupply Chain Vision in Pharma Industryixion11100% (1)
- Thesis Defence Public Presentation FinalDocument16 pagesThesis Defence Public Presentation FinalAlina AndreevNo ratings yet
- Press 2017 Fagioli enDocument2 pagesPress 2017 Fagioli enÁlvaro Rodríguez BNo ratings yet