You might also like
- Assembly Answers For UnderstandingDocument10 pagesAssembly Answers For UnderstandingJaspreet Kaur100% (1)
- CCB 2 - e PDFDocument5 pagesCCB 2 - e PDFMouloud AcheroufeneNo ratings yet
- Lecture 19 - FlipFlops IIDocument46 pagesLecture 19 - FlipFlops IIAbdul WahabNo ratings yet
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocument45 pagesAsynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemskirthicaNo ratings yet
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocument45 pagesAsynchronous Sequential Circuits: E&CE223 Digital Circuits and Systemskirthica100% (1)
- Exp 6Document7 pagesExp 6Mohini Mohan BeheraNo ratings yet
- Sequential CircuitsDocument32 pagesSequential CircuitsPrafulani Gajbhiye100% (1)
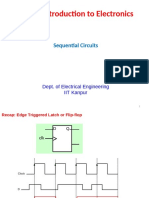
- Esc201: Introducton To Electronics: Sequental CircuitsDocument34 pagesEsc201: Introducton To Electronics: Sequental CircuitssomeshNo ratings yet
- LKDigit2 SequentialDocument29 pagesLKDigit2 SequentialDian ApriliaNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- 08 Analysis of Synch State MachineDocument43 pages08 Analysis of Synch State Machinejundi hibatullahNo ratings yet
- Latches&FFsDocument9 pagesLatches&FFssanjeevani rawatNo ratings yet
- Designing Synchronous Counters (9.5 FLOYD) ++: Warning!! Important TopicDocument31 pagesDesigning Synchronous Counters (9.5 FLOYD) ++: Warning!! Important TopicAbdul RafayNo ratings yet
- Flip FlopsDocument53 pagesFlip FlopsmoretejhonadrianNo ratings yet
- Flip FlopsDocument39 pagesFlip FlopsPradeep KuruvattiNo ratings yet
- 1 FFDocument58 pages1 FFmukul20031No ratings yet
- Sequential Logic: (Chapter 3: Finite State Machine)Document26 pagesSequential Logic: (Chapter 3: Finite State Machine)Paul Christian M. CristobalNo ratings yet
- EN Présentation AO Synthèse Circuit Séquentiel22 23Document28 pagesEN Présentation AO Synthèse Circuit Séquentiel22 23Smail SmartNo ratings yet
- Lect19 Sequential Logic Part-2Document21 pagesLect19 Sequential Logic Part-2ramulakshmanan12No ratings yet
- DSD Exp 5Document7 pagesDSD Exp 5Kanika SinghNo ratings yet
- Filip FlopsDocument4 pagesFilip FlopsMohammed JeelanNo ratings yet
- Quant Mech Curs 2016 C2Document32 pagesQuant Mech Curs 2016 C2AndreiPetrutStîngescuNo ratings yet
- Lab 1: Study of Gates & Flip-Flops: - Digital IC Trainer KitDocument81 pagesLab 1: Study of Gates & Flip-Flops: - Digital IC Trainer KitforghanNo ratings yet
- Rangkaian Sekuensial (Flip-Flop & Latch)Document50 pagesRangkaian Sekuensial (Flip-Flop & Latch)Hairun NisaNo ratings yet
- Latches N FFsDocument24 pagesLatches N FFsAmoga LekshmiNo ratings yet
- Unit 6 Introduction To Sequential LogicDocument34 pagesUnit 6 Introduction To Sequential LogicTech Talk With MR. SNo ratings yet
- EP 5511 - Lecture 08Document23 pagesEP 5511 - Lecture 08Solomon Tadesse AthlawNo ratings yet
- DF GTU Study Material Presentations Unit-3Document54 pagesDF GTU Study Material Presentations Unit-3bhavanitelecom123No ratings yet
- Synchronous Sequential Logic: Chapter-5 Mano, Ciletti Digital Design 6/eDocument55 pagesSynchronous Sequential Logic: Chapter-5 Mano, Ciletti Digital Design 6/eumairNo ratings yet
- Latches and Flip Flops CharacteristicsDocument13 pagesLatches and Flip Flops CharacteristicsWeaam RaedNo ratings yet
- CH5 - Synchronous Sequenctial CircuitDocument73 pagesCH5 - Synchronous Sequenctial CircuitRobert slashNo ratings yet
- Unit 2 PDFDocument30 pagesUnit 2 PDFKanna MonishNo ratings yet
- NR Application To Power FlowDocument23 pagesNR Application To Power FlowFawzi RadwanNo ratings yet
- Fundamentals of Digital IC Design: ECE 428 Programmable ASIC DesignDocument29 pagesFundamentals of Digital IC Design: ECE 428 Programmable ASIC DesignBadangNo ratings yet
- Mitu SikaDocument11 pagesMitu SikaNishat FarjanaNo ratings yet
- Z Transform PrimerDocument11 pagesZ Transform Primerveicastaneda14No ratings yet
- Flip-Flops and Related Devices CHAPTER 5Document32 pagesFlip-Flops and Related Devices CHAPTER 5badhell_18100% (1)
- Introduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridDocument25 pagesIntroduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridTiliksew Wudie AssabeNo ratings yet
- M475 - c2 - L4 - Z TransformDocument8 pagesM475 - c2 - L4 - Z TransformAli AlmakhmariNo ratings yet
- Curso: Ing. Moisés Ventosilla ZevallosDocument40 pagesCurso: Ing. Moisés Ventosilla ZevallosJorge Antonio Santana SánchezNo ratings yet
- EEE 241 - Lecture 27 & 28Document14 pagesEEE 241 - Lecture 27 & 28fefavop474No ratings yet
- DynamicsDocument41 pagesDynamicsHùng TrầnNo ratings yet
- Lab 13 2022 2Document2 pagesLab 13 2022 2CuongNo ratings yet
- Chapter #6: Sequential Logic DesignDocument48 pagesChapter #6: Sequential Logic DesignmasteroffateNo ratings yet
- Sistem Kendali Digital Program S1 Departemen Elektro FTUIDocument53 pagesSistem Kendali Digital Program S1 Departemen Elektro FTUIMuhammad SyifaNo ratings yet
- LU and Fast Power FlowDocument27 pagesLU and Fast Power FlowJoão BatistaNo ratings yet
- Lecture 6Document22 pagesLecture 6Osama TahanNo ratings yet
- Chap - 04-Sequential CircuitsDocument47 pagesChap - 04-Sequential Circuitscharbelkhalil05No ratings yet
- Chapter 7Document58 pagesChapter 7Mujaahid KhanNo ratings yet
- 29 Flip Flop Conversion 28-02-2023Document7 pages29 Flip Flop Conversion 28-02-2023Back upNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Partial Autocorrelations: Timotheus Darikwa SSTA031: Time Series AnalysisDocument26 pagesPartial Autocorrelations: Timotheus Darikwa SSTA031: Time Series AnalysisMaggie Kalembo100% (1)
- It2623 Sequential CKTDocument80 pagesIt2623 Sequential CKTDERICK TIMOTHY CASTRONo ratings yet
- ECE530 Fall2015 Lect4Document42 pagesECE530 Fall2015 Lect4robertovm2002No ratings yet
- Flip FlopsDocument28 pagesFlip FlopssreekarscribdNo ratings yet
- State-Space Models For LTI SystemsDocument39 pagesState-Space Models For LTI SystemsHarshaNo ratings yet
- EL TampereDocument43 pagesEL TampereDonika JuthaniNo ratings yet
- Harolds Discrete Math Flip Flops Cheat Sheet 2020Document6 pagesHarolds Discrete Math Flip Flops Cheat Sheet 2020Nandini JayakumarNo ratings yet
- ECE 124 Week 7 ReviewDocument55 pagesECE 124 Week 7 Reviewjahnavi thotaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Material List ENG54S01D8F - 20100210Document6 pagesMaterial List ENG54S01D8F - 20100210Tran Thanh LongNo ratings yet
- The System Unit Processing and MemoryDocument41 pagesThe System Unit Processing and MemoryLiviesh AndersonNo ratings yet
- TV/VCR Tuner Ic With DC/DC Converter: FeaturesDocument21 pagesTV/VCR Tuner Ic With DC/DC Converter: FeaturesEdsel SilvaNo ratings yet
- Dranetz HDPQ SP User Guide PDFDocument338 pagesDranetz HDPQ SP User Guide PDFAnonymous BBX2E87aHNo ratings yet
- Final Exam BBU30403 2020Document3 pagesFinal Exam BBU30403 2020Finaz JamilNo ratings yet
- Control Design: 5.1 Basic ConceptsDocument7 pagesControl Design: 5.1 Basic ConceptsAnneNo ratings yet
- PROJECT-LOON by JumiDocument35 pagesPROJECT-LOON by JuminathmanojNo ratings yet
- Perc335 365WDocument1 pagePerc335 365WomofeweNo ratings yet
- CSC 1002 Computer Architecture Second AssignmentDocument4 pagesCSC 1002 Computer Architecture Second AssignmentAchyut NeupaneNo ratings yet
- 2 SD 1825Document3 pages2 SD 1825Omar MirandaNo ratings yet
- ViewSonic CDE8620 86 - 4K Wireless Presentation Display (WPD)Document2 pagesViewSonic CDE8620 86 - 4K Wireless Presentation Display (WPD)Henky WijayaNo ratings yet
- Problemas Circuitos ElectricosDocument22 pagesProblemas Circuitos Electricosjesus 2208No ratings yet
- DSE8610 MKII Data SheetDocument2 pagesDSE8610 MKII Data SheetBERANGER DAVESNE DJOMALIA SIEWENo ratings yet
- Interfaces and DataMigration - DataMigration PDFDocument61 pagesInterfaces and DataMigration - DataMigration PDFadyani_0997No ratings yet
- AM25P-30P Series IIDocument53 pagesAM25P-30P Series IIwG HNo ratings yet
- ZTE GPON Low Level Design - 20082014Document25 pagesZTE GPON Low Level Design - 20082014Nhan LêNo ratings yet
- Introduction To ComputersDocument50 pagesIntroduction To ComputersJohn NjunwaNo ratings yet
- Mosfet: Presented by Vivek Krishna Kannan Siddarth Ram Mohan ArunDocument15 pagesMosfet: Presented by Vivek Krishna Kannan Siddarth Ram Mohan ArunMushaim AfreenNo ratings yet
- Eprom COP8SAB720N8 Central AlarmeDocument60 pagesEprom COP8SAB720N8 Central AlarmeSergio MarcioNo ratings yet
- I/O Port Structure: by B. Prasanthi, Assistant Professor Department. of ECE AITS, RajampetDocument40 pagesI/O Port Structure: by B. Prasanthi, Assistant Professor Department. of ECE AITS, RajampetNaganarasaiah GoudNo ratings yet
- Xeon D 1500 Ns Datasheet Vol 3Document110 pagesXeon D 1500 Ns Datasheet Vol 3digitalsureshNo ratings yet
- ლექცია 1 PDFDocument40 pagesლექცია 1 PDFIce age [ eli ]No ratings yet
- Automotive TFT-LCD Power Supply With Boost Converter and Gate Voltage RegulatorsDocument25 pagesAutomotive TFT-LCD Power Supply With Boost Converter and Gate Voltage RegulatorsHumberto AguilarNo ratings yet
- SMEC 300 Soil Moisture/EC/ Temperature Sensor: Item 6470-6Document2 pagesSMEC 300 Soil Moisture/EC/ Temperature Sensor: Item 6470-6Akil MarzukiNo ratings yet
- 106105163Document1,044 pages106105163Amandeep SinghNo ratings yet
- Main Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDocument25 pagesMain Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDhivya NNo ratings yet
- The Citadel Department of Electrical Engineering: Find: SolutionDocument12 pagesThe Citadel Department of Electrical Engineering: Find: SolutionTuấn VũNo ratings yet
- Final Year Group Project Presentation (Yousaf) 2018-2022Document25 pagesFinal Year Group Project Presentation (Yousaf) 2018-2022Usman AliNo ratings yet