You might also like
- DMD 3143 Nota Elektrik Power SteeringDocument16 pagesDMD 3143 Nota Elektrik Power Steeringzero80% (5)
- Bab 1Document15 pagesBab 1Muhammad Zaman IbrahimNo ratings yet
- Kertas Penerangan 1 - 5Document10 pagesKertas Penerangan 1 - 5mark wellNo ratings yet
- Kuliah1-Pengenalan Kepada PneumatikDocument26 pagesKuliah1-Pengenalan Kepada PneumatikZuhaila Mohammad100% (1)
- Makalah TCSDocument18 pagesMakalah TCSMuhammad Arif Nur HudaNo ratings yet
- Sistem Kawalan CengkamanDocument2 pagesSistem Kawalan CengkamanAzizul AnwarNo ratings yet
- Nama: Surya Irawan NIM: 16509134021 Kelas: B: TCS (Traction Control Sistem)Document4 pagesNama: Surya Irawan NIM: 16509134021 Kelas: B: TCS (Traction Control Sistem)Surya IrawanNo ratings yet
- Sistem Penghantaran KuasaDocument9 pagesSistem Penghantaran KuasaPensel KoNtot100% (1)
- Sistem GantunganDocument6 pagesSistem Gantunganraly ryNo ratings yet
- Antilock Brake System (ABS) Adalah Sistem Rem Yang Mengontrol Tekanan MinyakDocument6 pagesAntilock Brake System (ABS) Adalah Sistem Rem Yang Mengontrol Tekanan MinyakToto Firman AbadiiNo ratings yet
- Automatic TransimissionDocument7 pagesAutomatic TransimissionRick MacanNo ratings yet
- GEAr BoxDocument6 pagesGEAr BoxAnonymous JcdSmM3No ratings yet
- VT 2 Brek Dan Power SterringDocument11 pagesVT 2 Brek Dan Power SterringHakim AbrarNo ratings yet
- Topik 10 Sistem PenghantaranDocument10 pagesTopik 10 Sistem PenghantaransukriskbdNo ratings yet
- AUTOMATIC Power PointDocument23 pagesAUTOMATIC Power PointZunnur Afiq100% (4)
- Sistem BrekDocument8 pagesSistem Brekshukri100% (1)
- Sistem BrekDocument6 pagesSistem Brekchikguayien21No ratings yet
- Auto CruiseDocument57 pagesAuto CruiseAbdul Shokor Abd TalibNo ratings yet
- SistemDocument11 pagesSistemchippychipNo ratings yet
- Rekayasa Sistem Suplai Benda Kerja Pada Festo Modular Automation Production System - Maps - PDFDocument8 pagesRekayasa Sistem Suplai Benda Kerja Pada Festo Modular Automation Production System - Maps - PDFStuart YoungNo ratings yet
- Nota Kursus 1: Kementerian Pendidikan MalaysiaDocument24 pagesNota Kursus 1: Kementerian Pendidikan MalaysiaAmmar AminuddinNo ratings yet
- Perancangan Sistem KemudiDocument5 pagesPerancangan Sistem Kemudiaphiphatur rahmanNo ratings yet
- sISTEM PENGHANTARAN KUASADocument9 pagessISTEM PENGHANTARAN KUASAazmil_aziz_1No ratings yet
- AbsDocument24 pagesAbsSurya IrawanNo ratings yet
- Bab 2.2 Aplikasi Teknologi-Reka Bentuk MekanikalDocument38 pagesBab 2.2 Aplikasi Teknologi-Reka Bentuk MekanikalChe'gu AzrulNo ratings yet
- Sistem Penghantaran KuasaDocument9 pagesSistem Penghantaran KuasaZowl SaidinNo ratings yet
- Sistem Membrek Anti KunciDocument6 pagesSistem Membrek Anti KunciPAUL KENNY TSHONGNo ratings yet
- Folio AzharDocument8 pagesFolio AzharDanial HaimanNo ratings yet
- Modul 1 - Asas Pengenalan Traktor EditDocument48 pagesModul 1 - Asas Pengenalan Traktor EditAmin ZakariaNo ratings yet
- Folio STERENG ELEKTRIKDocument8 pagesFolio STERENG ELEKTRIKHazwan YusriNo ratings yet
- Sistem Pneumatik Dalam InstrumentasiDocument4 pagesSistem Pneumatik Dalam InstrumentasiAlfian Fadli PramadhanNo ratings yet
- Torque ConverterDocument8 pagesTorque Convertermpenderosa100% (1)
- Automatic Transmission Unit ReDocument13 pagesAutomatic Transmission Unit Realeppop53No ratings yet
- Sistem SokonganDocument42 pagesSistem SokonganAnonymous xJcF9ICi0% (1)
- Brake System 1Document20 pagesBrake System 1Nadhirah Joha50% (2)
- ObjektifDocument5 pagesObjektifkeloi83No ratings yet
- Stereng Kuasa ElektrikDocument5 pagesStereng Kuasa ElektrikAzizul AnwarNo ratings yet
- Gear SterengDocument5 pagesGear SterengPAUL KENNY TSHONGNo ratings yet
- Tugas Comon Lengkap KirimDocument20 pagesTugas Comon Lengkap KirimJeri Rizal FirdausNo ratings yet
- Sistem GantunganDocument9 pagesSistem GantunganRodziah Shariff100% (1)
- Sistem Gantungan (Power Point)Document18 pagesSistem Gantungan (Power Point)ابو حنيف100% (1)
- Parameter Unjuk KerjaDocument34 pagesParameter Unjuk Kerjabear_sandy4900No ratings yet
- BAB 2 Fungsi Kawalan MotorDocument47 pagesBAB 2 Fungsi Kawalan MotorZamrisharif67% (3)
- Uraian Materi Sistem Rem Sepeda MotorDocument14 pagesUraian Materi Sistem Rem Sepeda MotorMiftah0% (1)
- Mind MapDocument1 pageMind MapEpa RooneyNo ratings yet
- Kursus AutomotifDocument29 pagesKursus AutomotifHenry Bogard100% (1)
- Makalah Pneumatik Dan HidrolikDocument14 pagesMakalah Pneumatik Dan HidrolikAnonymous 8l97wt1100% (2)
- BAB 2 Fungsi Kawalan MotorDocument47 pagesBAB 2 Fungsi Kawalan MotorSiti Fatimah Mohd JamilNo ratings yet
- Control System Dea3323Document116 pagesControl System Dea3323MOHAMMAD LUTFI BIN MOHAMAD ZIN Moe100% (1)
- Transmisi ManualDocument7 pagesTransmisi ManualherlamNo ratings yet
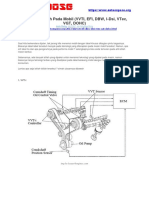
- Mengenal Istilah Pada Mobil (VVTI, EFI, DBW, I-Dsi, VTec, VGT, DOHC)Document8 pagesMengenal Istilah Pada Mobil (VVTI, EFI, DBW, I-Dsi, VTec, VGT, DOHC)ramsiNo ratings yet
- Sistem Brek Direka Untuk Membenarkan Pemandu Memperlahankan Serta Memberhentikan KenderaanDocument7 pagesSistem Brek Direka Untuk Membenarkan Pemandu Memperlahankan Serta Memberhentikan KenderaanMuizzuddin RosliNo ratings yet
- 06) Modul Kotak GearDocument10 pages06) Modul Kotak Gearfaizlyan100% (2)
- Report EnjinDocument21 pagesReport EnjinZaleha AbdulNo ratings yet
- Bab 1 Reka Bentuk MekatronikDocument2 pagesBab 1 Reka Bentuk MekatronikBavattharanee ChandranNo ratings yet