You might also like
- Productivity Now: Social Administration, Training, Economics and Production DivisionFrom EverandProductivity Now: Social Administration, Training, Economics and Production DivisionNo ratings yet
- Chapter 4Document75 pagesChapter 4mystic_sage_1791No ratings yet
- 3D Stress Components: Normal StressesDocument71 pages3D Stress Components: Normal Stressesengr_usman04No ratings yet
- Mechanics of Solids by Crandall, Dahl, LardnerDocument79 pagesMechanics of Solids by Crandall, Dahl, Lardnerpurijatin100% (6)
- Mohr S CircleDocument8 pagesMohr S Circlelalala uNo ratings yet
- CE 240 Soil Mechanics & Foundations: Stresses in A Soil Mass I (Das, Ch. 9)Document27 pagesCE 240 Soil Mechanics & Foundations: Stresses in A Soil Mass I (Das, Ch. 9)jorge.jimenezNo ratings yet
- Module-1: Lecture-3 (Principal Stress and Principal Planes) : February 9, 2017Document9 pagesModule-1: Lecture-3 (Principal Stress and Principal Planes) : February 9, 2017rangavaliNo ratings yet
- Plane Stress TransformationDocument14 pagesPlane Stress Transformationirfan shabbbirNo ratings yet
- LECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A PointDocument6 pagesLECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A Pointwinowich5813No ratings yet
- 2 - Plane Elasticity PDFDocument21 pages2 - Plane Elasticity PDFDheeraj KulkarniNo ratings yet
- Tutorial 7 SolDocument8 pagesTutorial 7 Solyadavtstsy07No ratings yet
- Reading Material Useful FormulaeDocument10 pagesReading Material Useful Formulaeantong maNo ratings yet
- Tensão Virtual de Von Mises PDFDocument10 pagesTensão Virtual de Von Mises PDFAlexandreNo ratings yet
- Aircraft Structural Analysis Summary: Basic Equations and StressesDocument20 pagesAircraft Structural Analysis Summary: Basic Equations and Stressespradeephit100% (1)
- Combined Loading: P V My TR VQ A A I J IbDocument7 pagesCombined Loading: P V My TR VQ A A I J IbAbhishek AroraNo ratings yet
- Mechanics of Solids Stress and Strain TransformationDocument22 pagesMechanics of Solids Stress and Strain TransformationMehmet CiglaNo ratings yet
- Stess Transformation EquationsDocument32 pagesStess Transformation EquationsM Shoaib AkramNo ratings yet
- 4-Stress Transformation 2015Document51 pages4-Stress Transformation 2015KHANG VÕ HOÀNGNo ratings yet
- Theme 2: Mohr Diagram: Exercise 2 - Mathematical Demonstration of The Existence of Principal StressesDocument8 pagesTheme 2: Mohr Diagram: Exercise 2 - Mathematical Demonstration of The Existence of Principal StressesNAFISSA BOURQUIANo ratings yet
- Direction CosinesDocument12 pagesDirection Cosinespasunurisharath50No ratings yet
- Shear Corr 2001 PDFDocument20 pagesShear Corr 2001 PDFCHILAKAPATI ANJANEYULUNo ratings yet
- 2 1 PDFDocument23 pages2 1 PDFANMOLNo ratings yet
- EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval AcademyDocument7 pagesEN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academysrinivas pavan kumar ANo ratings yet
- 3D Stress Components and Principal StressesDocument71 pages3D Stress Components and Principal Stressesiiscraja100% (1)
- Concepts of Stress and Strain: P Stress at A PointDocument21 pagesConcepts of Stress and Strain: P Stress at A PointNarendra ChavdaNo ratings yet
- Transformation of Stresses in 3-D: Reading ListDocument32 pagesTransformation of Stresses in 3-D: Reading Listkamel touilebNo ratings yet
- SEISMOLOGY, Lecture 2Document38 pagesSEISMOLOGY, Lecture 2Singgih Satrio WibowoNo ratings yet
- Finite Element Method: 3.0 Fe Theory: General ContinuumDocument30 pagesFinite Element Method: 3.0 Fe Theory: General ContinuumEmre UysalNo ratings yet
- Lecture 3 Theory of Elasticity and PlasticityDocument10 pagesLecture 3 Theory of Elasticity and PlasticityVinayak UntwaleNo ratings yet
- 2017 Tutorial InPlane Principal Stress OutputDocument42 pages2017 Tutorial InPlane Principal Stress OutputMike2322No ratings yet
- Combining StressesDocument18 pagesCombining StressesRaghavendra RaghavNo ratings yet
- Nitish Structure1Document19 pagesNitish Structure1vishu1112No ratings yet
- chapter 2Document49 pageschapter 2nitingautam1907No ratings yet
- Section2 4 PDFDocument14 pagesSection2 4 PDFGabriel SoaresNo ratings yet
- 5 StressDocument1 page5 StressR S PappuNo ratings yet
- Mechanical Engineering Stress Analysis VisualizedDocument7 pagesMechanical Engineering Stress Analysis VisualizedHamood Al-bahraniNo ratings yet
- Topic 2 Stresses in 3D SolidsDocument16 pagesTopic 2 Stresses in 3D SolidsSri NiranjanNo ratings yet
- CEP PresentationDocument20 pagesCEP PresentationGoutham BurraNo ratings yet
- Theory of Stress Strain and Hooks LawDocument71 pagesTheory of Stress Strain and Hooks LawVishal SinhaNo ratings yet
- Lecture Part IB 3-Slides-Per-Page PDFDocument14 pagesLecture Part IB 3-Slides-Per-Page PDFHema SundaramNo ratings yet
- P4 Stress and Strain Transformation EquationsDocument32 pagesP4 Stress and Strain Transformation Equationsadnankhan1988No ratings yet
- Stress Tensor Lec.2Document24 pagesStress Tensor Lec.2Malak ShatiNo ratings yet
- The Concept of StressDocument28 pagesThe Concept of Stressmustafa1011No ratings yet
- Stress Strain TensorDocument13 pagesStress Strain TensorLight HouseNo ratings yet
- GATE AEROSPACE Engineering Aircraft Structures BasicsDocument11 pagesGATE AEROSPACE Engineering Aircraft Structures BasicsAshok KumarNo ratings yet
- Patahandankelelahan Patahandankelelahan Patahandankelelahan PatahandankelelahanDocument7 pagesPatahandankelelahan Patahandankelelahan Patahandankelelahan PatahandankelelahanAis FpNo ratings yet
- Lectuer 1 Complex Stresses PDFDocument20 pagesLectuer 1 Complex Stresses PDFadel swar100% (1)
- Lesson 03 2015Document48 pagesLesson 03 2015abimalainNo ratings yet
- Assignment 1 - Stress in 3DDocument1 pageAssignment 1 - Stress in 3DAmrinaAkmalNo ratings yet
- 14 RESISTENCIA 1.desbloqueadoDocument47 pages14 RESISTENCIA 1.desbloqueadoVíctor Obregón MartínezNo ratings yet
- MEng6302 Lecture 2 Fundamental Concepts ASM 2021Document22 pagesMEng6302 Lecture 2 Fundamental Concepts ASM 2021KKDhNo ratings yet
- MEng6302 Lecture 2 Fundamental Concepts ASM 2021Document22 pagesMEng6302 Lecture 2 Fundamental Concepts ASM 2021KKDhNo ratings yet
- Simple Explanation About ShellDocument3 pagesSimple Explanation About Shelldaylight888No ratings yet
- Why do Multiaxial Fatigue CalculationsDocument77 pagesWhy do Multiaxial Fatigue CalculationsN.g. NagarajNo ratings yet
- Linear plate bending and laminate theoryDocument32 pagesLinear plate bending and laminate theorysebastianmatiasNo ratings yet
- College of Engineering, Architecture and Technology:: Course Title: Course Number: Course DescriptionDocument13 pagesCollege of Engineering, Architecture and Technology:: Course Title: Course Number: Course DescriptionEdmil Jhon AriquesNo ratings yet
- Plasticity Review: 2.1 Stress InvariantsDocument9 pagesPlasticity Review: 2.1 Stress InvariantsMike VandumuruganNo ratings yet
- CVE4002 Lecture 09Document50 pagesCVE4002 Lecture 09Keith YangNo ratings yet
- Lecture 11Document43 pagesLecture 11Keith YangNo ratings yet
- CVE4002 Lecture 10Document56 pagesCVE4002 Lecture 10Keith YangNo ratings yet
- CVE4002 Lecture 06 Steel in HousesDocument36 pagesCVE4002 Lecture 06 Steel in HousesKeith YangNo ratings yet
- CVE4002 Lecture 07Document48 pagesCVE4002 Lecture 07Keith YangNo ratings yet
- 2 The Australian Standards For Structural Design Actions Series AS 1170Document33 pages2 The Australian Standards For Structural Design Actions Series AS 1170Keith YangNo ratings yet
- CVE4002 Lecture 03Document62 pagesCVE4002 Lecture 03Keith YangNo ratings yet
- CVE4002 Lecture 08Document66 pagesCVE4002 Lecture 08Keith YangNo ratings yet
- RobustnessDocument10 pagesRobustnessKeith YangNo ratings yet
- CVE4002 Lecture 02Document60 pagesCVE4002 Lecture 02Keith YangNo ratings yet
- Structural Steel Beam to Column Connection DesignDocument7 pagesStructural Steel Beam to Column Connection DesignWazini D. IzaniNo ratings yet
- Lecture 3 Control Volume Linear MomentumDocument5 pagesLecture 3 Control Volume Linear MomentumKeith YangNo ratings yet
- Design Calculation For L Angle - Eurocode DesignDocument2 pagesDesign Calculation For L Angle - Eurocode Designvikramjain660% (1)
- CVE4002 Lecture 05 Timber FramingDocument67 pagesCVE4002 Lecture 05 Timber FramingKeith YangNo ratings yet
- CVE4002 Lecture 04 SlidesDocument58 pagesCVE4002 Lecture 04 SlidesKeith YangNo ratings yet
- PFP 136F Backpropping Flat SlabsDocument16 pagesPFP 136F Backpropping Flat SlabsAdonis CabrasNo ratings yet
- Latitude East - A Multiplex Project: Structural Steel DeliveredDocument2 pagesLatitude East - A Multiplex Project: Structural Steel DeliveredKeith YangNo ratings yet
- Maslow'sDocument5 pagesMaslow'sKeith YangNo ratings yet
- Expectancy TheoryDocument11 pagesExpectancy TheoryKeith YangNo ratings yet
- Energy BalancesDocument43 pagesEnergy BalancesKeith YangNo ratings yet
- Chapter II III Stress Plane 2D ProblemDocument18 pagesChapter II III Stress Plane 2D ProblemKeith YangNo ratings yet
- Lecture 2 General Control Volume Conservation EquationDocument2 pagesLecture 2 General Control Volume Conservation EquationKeith YangNo ratings yet
- Maslow's 2Document19 pagesMaslow's 2Keith YangNo ratings yet
- GENG1803 Introduction to Fluid MechanicsDocument15 pagesGENG1803 Introduction to Fluid MechanicsKeith YangNo ratings yet
- Lecture 2 General Control Volume Conservation EquationDocument2 pagesLecture 2 General Control Volume Conservation EquationKeith YangNo ratings yet
- Chapter I Theory of ElasticityDocument18 pagesChapter I Theory of ElasticityKeith YangNo ratings yet
- Partial Differentiation Equation - PDEDocument42 pagesPartial Differentiation Equation - PDEKeith YangNo ratings yet
- Stormwater Notes Part8Document4 pagesStormwater Notes Part8Keith YangNo ratings yet
- Tut 2 Fluid Static & Hydrostatic ThrustDocument8 pagesTut 2 Fluid Static & Hydrostatic ThrustKeith YangNo ratings yet
- Base Plate Design in LSM by IS Code Revision 2Document24 pagesBase Plate Design in LSM by IS Code Revision 2Structural SpreadsheetsNo ratings yet
- Estimation of Minimum and Maximum Horizontal Stresses From Well Log, A Case Study in Rumaila Oil Field, IraqDocument13 pagesEstimation of Minimum and Maximum Horizontal Stresses From Well Log, A Case Study in Rumaila Oil Field, IraqHamed YousifNo ratings yet
- 3.5 Measurement of Pump EfficiencyDocument2 pages3.5 Measurement of Pump EfficiencydzikrydsNo ratings yet
- Assignment 1 Basic of Heat TransferDocument2 pagesAssignment 1 Basic of Heat TransferAnkit MehrotraNo ratings yet
- Star Rating List For Room Air ConditionersDocument64 pagesStar Rating List For Room Air ConditionersAshish Aggarwal100% (3)
- Soil Modelling: David Muir WoodDocument4 pagesSoil Modelling: David Muir WoodAnonymous v1blzDsEWANo ratings yet
- Co2 Star-Refrigeratio - Precautio@opening Parts of R744 SystDocument2 pagesCo2 Star-Refrigeratio - Precautio@opening Parts of R744 SystmanonpomNo ratings yet
- 412 WK 01Document24 pages412 WK 01SHUBHAM SINGHNo ratings yet
- Philosophy of Limit State Design and Classification of SectionsDocument96 pagesPhilosophy of Limit State Design and Classification of Sectionsybm987100% (1)
- M313Dand M315DWheeledExcavatorHydraulicSystemDocument21 pagesM313Dand M315DWheeledExcavatorHydraulicSystemjulio100% (4)
- Submitted To:: Lab ManualDocument30 pagesSubmitted To:: Lab ManualAbdul Azeem50% (2)
- Cracks in Immature ConcreteDocument2 pagesCracks in Immature ConcreterasikamalNo ratings yet
- B.E. 2nd IA Test Mechanics of MaterialsDocument1 pageB.E. 2nd IA Test Mechanics of MaterialsmadhuNo ratings yet
- Cut and Covers TunnelsDocument18 pagesCut and Covers TunnelsRene RoblesNo ratings yet
- Heat Worksheet Solutions ExplainedDocument10 pagesHeat Worksheet Solutions ExplainedMEGHNA BAGCHINo ratings yet
- Ideal Gas LawDocument12 pagesIdeal Gas LawJeet Trivedi100% (1)
- Lab1 Heat RadiationDocument8 pagesLab1 Heat Radiationsarjan59No ratings yet
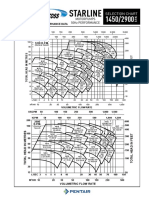
- Starline centrifugal pump performance chartDocument122 pagesStarline centrifugal pump performance chartThomas KamongNo ratings yet
- CHEM 1 - Lesson 3 - Part 2 - GAS LAWDocument46 pagesCHEM 1 - Lesson 3 - Part 2 - GAS LAWRoss TornNo ratings yet
- Heat Load Estimation E20 Form SIDocument1 pageHeat Load Estimation E20 Form SIjacobojosueNo ratings yet
- Solution To Problem 575 - Horizontal Shearing Stress - Strength of Materials Review Assignment 3Document5 pagesSolution To Problem 575 - Horizontal Shearing Stress - Strength of Materials Review Assignment 3Rehan HakroNo ratings yet
- Design of Crane Girder for TG BayDocument31 pagesDesign of Crane Girder for TG BaygvlanushaNo ratings yet
- Final Exam: Strength of MaterialsDocument37 pagesFinal Exam: Strength of MaterialsShyra Dela CruzNo ratings yet
- B49CE Exam Answers v1Document40 pagesB49CE Exam Answers v1Konul AlizadehNo ratings yet
- Hydraulic PumpsDocument19 pagesHydraulic PumpsSENANAYAKE S.H.RNo ratings yet
- (B.U Pai) Turbomachines (B-Ok - Xyz)Document408 pages(B.U Pai) Turbomachines (B-Ok - Xyz)Prithwiraj Paul100% (1)
- Flashcards - CP2 Determination of The Enthalpy Change of A Reaction Using Hess's Law - Edexcel IAL Chemistry A-LevelDocument27 pagesFlashcards - CP2 Determination of The Enthalpy Change of A Reaction Using Hess's Law - Edexcel IAL Chemistry A-LevelTravel UnlimitedNo ratings yet
- 11.0 Compressors, Blowers, and Fans Preface: Bechtel ConfidentialDocument32 pages11.0 Compressors, Blowers, and Fans Preface: Bechtel ConfidentialCristhianNo ratings yet
- CME 301 - Mass Transfer Convective Mass Transfer: Dr. Chandra Mouli MRDocument31 pagesCME 301 - Mass Transfer Convective Mass Transfer: Dr. Chandra Mouli MRNajmul Puda PappadamNo ratings yet
- Steel - 9-Prof. Zahid Siddiqi PDFDocument73 pagesSteel - 9-Prof. Zahid Siddiqi PDFMuhammad Ahmed100% (1)