You might also like
- Fluid KinematicsDocument109 pagesFluid KinematicsLorence Gabayan100% (1)
- Hydraulics Velocity FieldDocument47 pagesHydraulics Velocity FieldTaslim Alam RafiNo ratings yet
- Feeg2003 L23Document11 pagesFeeg2003 L23jiales225No ratings yet
- FLUID MECHANICS QUESTIONSDocument12 pagesFLUID MECHANICS QUESTIONSnaiaraNo ratings yet
- Chapter CFDDocument6 pagesChapter CFDAnonymous XzqXVMjNo ratings yet
- MTS 234 Lecture Notes: Deriving ODEsDocument4 pagesMTS 234 Lecture Notes: Deriving ODEsOladimeji YusufNo ratings yet
- Mefc 110 Module IVDocument23 pagesMefc 110 Module IVreynaldgurion09No ratings yet
- Flu Mech ExDocument18 pagesFlu Mech ExLeonardo RedNo ratings yet
- Ideal R Eactors: 2.1 G Eneralised R Eactor M Ass BalanceDocument11 pagesIdeal R Eactors: 2.1 G Eneralised R Eactor M Ass BalanceJonathan ByamunguNo ratings yet
- C3 FluidizationDocument10 pagesC3 FluidizationTashie de LeonNo ratings yet
- Engineering MechanicDocument16 pagesEngineering MechanicKantiporn KhunthongNo ratings yet
- Fundamentals of Fluid FlowDocument38 pagesFundamentals of Fluid FlowharimecNo ratings yet
- Feeg2003 L21Document9 pagesFeeg2003 L21jiales225No ratings yet
- Midterm 1 - SolutionDocument2 pagesMidterm 1 - Solutioninci nisa çakırNo ratings yet
- Fluid Mechanics: Lecture Notes - IiiDocument12 pagesFluid Mechanics: Lecture Notes - Iiidurga sharmaNo ratings yet
- HuaconEM Ass2 DinSDocument12 pagesHuaconEM Ass2 DinSErick MateoNo ratings yet
- Technical Math 2 Differentiation Application RatesDocument18 pagesTechnical Math 2 Differentiation Application RatesAhmad DanialNo ratings yet
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNo ratings yet
- Fluid KinematicsDocument14 pagesFluid KinematicsRavi KantNo ratings yet
- Viscosity: DSC 1D (GE T4) Waves and OpticsDocument6 pagesViscosity: DSC 1D (GE T4) Waves and OpticsFavourite MoviesNo ratings yet
- Claysius Clapeyron Lab ExperimentDocument11 pagesClaysius Clapeyron Lab Experimentmohamad munzir100% (1)
- 10.2 Kinematics of Rotational Motion - College Physics 2e OpenStaxDocument1 page10.2 Kinematics of Rotational Motion - College Physics 2e OpenStaxALIENN 51No ratings yet
- Wavelength and Wave Period Relationship With Wave Amplitude: A Velocity Potential FormulationDocument7 pagesWavelength and Wave Period Relationship With Wave Amplitude: A Velocity Potential FormulationIJAERS JOURNALNo ratings yet
- Governing Equations of Turbulent FlowsDocument11 pagesGoverning Equations of Turbulent FlowsVijay NarayanNo ratings yet
- CE 1500: Environment and Safety Engineering: Purification of water suppliesDocument28 pagesCE 1500: Environment and Safety Engineering: Purification of water suppliesPabitra Ranjan DasNo ratings yet
- Unit7 - Time Rate of ChangeDocument12 pagesUnit7 - Time Rate of ChangeDylan AngelesNo ratings yet
- Nonuniform Open Channel Flow With Upward Seepage Through Loose BedsDocument7 pagesNonuniform Open Channel Flow With Upward Seepage Through Loose Bedssinatra02No ratings yet
- Patel NotesDocument15 pagesPatel NotesatmarammelepatNo ratings yet
- Vector Calculus Laplace Transforms HandoutDocument35 pagesVector Calculus Laplace Transforms HandoutAakanksha KartikNo ratings yet
- VISCOUS FLOW SIMULATION ARROUND NACA 641-212 - Fillipe OliveiraDocument20 pagesVISCOUS FLOW SIMULATION ARROUND NACA 641-212 - Fillipe OliveiraFillipe OliveiraNo ratings yet
- By Dr. Paragmoni Kalita Department of Mechanical Engineering Tezpur UniversityDocument31 pagesBy Dr. Paragmoni Kalita Department of Mechanical Engineering Tezpur UniversityR HNo ratings yet
- Rotational Kinematics EquationsDocument6 pagesRotational Kinematics EquationsRein manzanoNo ratings yet
- Everaise PhysicsMechanics 1Document14 pagesEveraise PhysicsMechanics 1Jerry LiNo ratings yet
- Lecture 3bDocument7 pagesLecture 3bMaame DurowaaNo ratings yet
- Dynamics - Chapter 2.1Document6 pagesDynamics - Chapter 2.1soraNo ratings yet
- ME 362_4Document21 pagesME 362_4ElormeNo ratings yet
- Related Rates by Rosemarie Madelo & An-An NaldozaDocument20 pagesRelated Rates by Rosemarie Madelo & An-An NaldozaSANDDY MADERANo ratings yet
- Related Rates by Rosemarie Madelo & An-An NaldozaDocument20 pagesRelated Rates by Rosemarie Madelo & An-An NaldozaSANDDY MADERANo ratings yet
- Vibrations and Waves Lecture1Document14 pagesVibrations and Waves Lecture1HONG XIANo ratings yet
- ViscoelasticityDocument11 pagesViscoelasticitymchilwesaNo ratings yet
- Fluid Mechanics Activity 3Document8 pagesFluid Mechanics Activity 3Cyrus RivasNo ratings yet
- Nozzle Design ReportDocument4 pagesNozzle Design ReportnitantharaniNo ratings yet
- Section I: KinematicsDocument3 pagesSection I: KinematicsIshu PatelNo ratings yet
- Fluid Kinematics: Fluid Mechanics I EMEC3309Document15 pagesFluid Kinematics: Fluid Mechanics I EMEC3309Naser KhalidNo ratings yet
- Oase ProjectDocument13 pagesOase ProjectAisien ZionNo ratings yet
- EECQ - 4242 - Distributed Flow RoutingDocument4 pagesEECQ - 4242 - Distributed Flow RoutingEICQ/00154/2020 SAMUEL MWANGI RUKWARONo ratings yet
- Paper On Navier-Stokes EquationsDocument11 pagesPaper On Navier-Stokes EquationsVSTomarNo ratings yet
- Bismark FinalDocument15 pagesBismark FinalBENNo ratings yet
- Fluid Kinematics GuideDocument42 pagesFluid Kinematics GuideZain MustafaNo ratings yet
- Fluid Mechanics 1 NotesDocument127 pagesFluid Mechanics 1 NotesParas Thakur100% (2)
- Lecture 1 Kinematics of Particle Rectilinear TranslationDocument33 pagesLecture 1 Kinematics of Particle Rectilinear TranslationKRISTINE MIRANDANo ratings yet
- Part B - Viscous FlowDocument68 pagesPart B - Viscous FlowSamNo ratings yet
- Fluid in ContinuumDocument12 pagesFluid in ContinuumPraveen Siluvai AntonyNo ratings yet
- Report SaikatDocument21 pagesReport Saikatbhaumik patelNo ratings yet
- Applied Thermodynamics Module 4: Compressible Flow: Total) EnthalpyDocument30 pagesApplied Thermodynamics Module 4: Compressible Flow: Total) Enthalpymildred velardoNo ratings yet
- Euler and Lagrange descriptionsDocument12 pagesEuler and Lagrange descriptionsgabriPVNo ratings yet
- Capital Preservation.Document17 pagesCapital Preservation.Suman KakkiralaNo ratings yet
- Introduction To Fluid MechanicsDocument28 pagesIntroduction To Fluid MechanicsMavu IndenciaNo ratings yet
- Chen 801-T3Document28 pagesChen 801-T3hussainiNo ratings yet
- Sustainability 11 06714Document13 pagesSustainability 11 06714hussainiNo ratings yet
- H21 Report Interactive PDF July 2016Document382 pagesH21 Report Interactive PDF July 2016oidaadm100% (1)
- Chen 801-T2Document27 pagesChen 801-T2hussainiNo ratings yet
- Chen 801-T1Document35 pagesChen 801-T1hussainiNo ratings yet
- Riba in Islam: Fiqh of Contemporary IssuesDocument41 pagesRiba in Islam: Fiqh of Contemporary Issuessyed914No ratings yet
- Annudeep Dhiman, RHEOLOGICAL PROPERTIES & CORROSION CHARACTERISTICS OF PDFDocument78 pagesAnnudeep Dhiman, RHEOLOGICAL PROPERTIES & CORROSION CHARACTERISTICS OF PDFbharathpeNo ratings yet
- Alfa Laval Packinox For Catalytic Reforming: Combined Feed/effluent Heat ExchangerDocument3 pagesAlfa Laval Packinox For Catalytic Reforming: Combined Feed/effluent Heat Exchangerrizwan khan100% (1)
- 3.10 DRILLING FLUIDS SUMMARY DRILLING FLUIDS - 36 Hole PDFDocument157 pages3.10 DRILLING FLUIDS SUMMARY DRILLING FLUIDS - 36 Hole PDFhussainiNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument35 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistshussainiNo ratings yet
- Reology and TemperatureDocument16 pagesReology and TemperatureazeazeazeNo ratings yet
- Chen 801-T1Document35 pagesChen 801-T1hussainiNo ratings yet
- Production of Hair Cream Using Moringa Oleifera andDocument16 pagesProduction of Hair Cream Using Moringa Oleifera andhussaini50% (4)
- Stirling CycleDocument4 pagesStirling CycleEric KerrNo ratings yet
- High Temperature and High Pressure Rheological Properties of High-Density ZdwhuedvhgguloolqjàxlgvirughhszhoovDocument9 pagesHigh Temperature and High Pressure Rheological Properties of High-Density ZdwhuedvhgguloolqjàxlgvirughhszhoovhussainiNo ratings yet
- LinearizationDocument11 pagesLinearizationhussainiNo ratings yet
- Flowsheet GuideDocument1 pageFlowsheet GuidehussainiNo ratings yet
- Psychrometrics: United States Standard AtmosphereDocument17 pagesPsychrometrics: United States Standard AtmosphereYuti PasaribuNo ratings yet
- API WSD Punch CodeCheckDocument7 pagesAPI WSD Punch CodeCheckKhải TrươngNo ratings yet
- Compound Xi Kat101 C K Xi: Acetic Acid Methyl Acetate Iodomethane WaterDocument5 pagesCompound Xi Kat101 C K Xi: Acetic Acid Methyl Acetate Iodomethane WaterDương HoàngNo ratings yet
- Convection: MPO 551 - Intro To Atmospheric Science Chidong Zhang Fall 2008Document18 pagesConvection: MPO 551 - Intro To Atmospheric Science Chidong Zhang Fall 2008Suraj KashyapNo ratings yet
- Ventana 04 PDFDocument2 pagesVentana 04 PDFPedro IzquierdoNo ratings yet
- Overview of Atmospheric Convection: Program Massachusetts Institute of Technology Cambridge, Massachusetts, USADocument28 pagesOverview of Atmospheric Convection: Program Massachusetts Institute of Technology Cambridge, Massachusetts, USAGilad ShreibshteinNo ratings yet
- Comprehensive Analysis of A Solar DryerDocument22 pagesComprehensive Analysis of A Solar DryerÁlvaro Gómez DelgadoNo ratings yet
- Universal Beam and Column Properties SheetDocument11 pagesUniversal Beam and Column Properties SheetkalpanaadhiNo ratings yet
- Quiz ChemistryDocument3 pagesQuiz ChemistryMohd imtiazNo ratings yet
- Properties of SLGDocument2 pagesProperties of SLGXinyi ZhouNo ratings yet
- Fatigue Properties of Ferritebainite Dual-Phase X80 Pipeline Steel Welded JointsDocument11 pagesFatigue Properties of Ferritebainite Dual-Phase X80 Pipeline Steel Welded JointsJohan Esteban Garcia PuentesNo ratings yet
- D 3737 - 02 Rdm3mzctukveDocument32 pagesD 3737 - 02 Rdm3mzctukveJosé Ramón GutierrezNo ratings yet
- 1 s2.0 S0038080621001037 MainDocument17 pages1 s2.0 S0038080621001037 MainFred AgliamNo ratings yet
- Hydraulics Topic 6 Hydraulic Machinery PDFDocument48 pagesHydraulics Topic 6 Hydraulic Machinery PDFVictoria JungNo ratings yet
- Lecture 2 Mechanical PropertiesDocument28 pagesLecture 2 Mechanical Propertiesumama huzaifaNo ratings yet
- CE 580 Computational Fluid Dynamics TechniquesDocument2 pagesCE 580 Computational Fluid Dynamics TechniquesDeniz C. AydinNo ratings yet
- Dislocation MotionDocument40 pagesDislocation Motionart180No ratings yet
- Astm D-4212Document6 pagesAstm D-4212Dan Mat100% (2)
- Chapter 10 Phase TransformationDocument26 pagesChapter 10 Phase TransformationEffendy AdipratamaNo ratings yet
- Course O-5003 Centrifugal Pump Analysis For Petroleum ApplicationsDocument70 pagesCourse O-5003 Centrifugal Pump Analysis For Petroleum ApplicationsPok Jak Salleh100% (1)
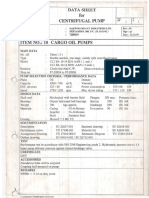
- Cargo Pump Curve - MT BourneDocument2 pagesCargo Pump Curve - MT Bournetimayaa1000100% (1)
- Optimal Boiler Size and Its Relation To Seasonal Efficiency PDFDocument45 pagesOptimal Boiler Size and Its Relation To Seasonal Efficiency PDFbobbobNo ratings yet
- Steam and Rankine Cycle OtDocument5 pagesSteam and Rankine Cycle OtRegineil JavierNo ratings yet
- Chemical EquilibriumDocument162 pagesChemical EquilibriumHarshit MalhotraNo ratings yet
- Determinations Oil Properties by PVT CorrelationsDocument104 pagesDeterminations Oil Properties by PVT CorrelationsSuleiman BaruniNo ratings yet
- Effect of Vortex Generators On Aerodynamics of A Car: CFD AnalysisDocument10 pagesEffect of Vortex Generators On Aerodynamics of A Car: CFD AnalysisVineet SinghNo ratings yet
- 7A Phase TransformationsDocument15 pages7A Phase TransformationsAhmed AliNo ratings yet
- Pme 111 - L3-5 - DmimDocument22 pagesPme 111 - L3-5 - DmimAbu SayeedNo ratings yet
- Fisher CV ValuesDocument220 pagesFisher CV Valuesthehammer2100% (3)