You might also like
- 09 DIRA Software - Administrator's Guide - InstallationDocument16 pages09 DIRA Software - Administrator's Guide - InstallationwellsuNo ratings yet
- Cyber Security Small Business Guide (NCSC)Document16 pagesCyber Security Small Business Guide (NCSC)ivanpmnNo ratings yet
- Power Transformer Fundamentals: Design and ManufacturingDocument52 pagesPower Transformer Fundamentals: Design and Manufacturingjuliancansen100% (1)
- Moshell For Msrbs Du&BbDocument394 pagesMoshell For Msrbs Du&BbAnonymous XZnkpMec100% (2)
- ACVG TheoryDocument49 pagesACVG TheorynuvanNo ratings yet
- Signal Integrity:: Applied Electromagnetics and Professional PracticeDocument16 pagesSignal Integrity:: Applied Electromagnetics and Professional PracticeKashif HassanNo ratings yet
- 457 Opamp 1 424Document28 pages457 Opamp 1 424v4vktryNo ratings yet
- Nmos Inverter: Resistive LoadDocument9 pagesNmos Inverter: Resistive LoadVidhya DsNo ratings yet
- New ECE 4101Document81 pagesNew ECE 4101Joy MeNo ratings yet
- EMI and Layout FundamentalsDocument38 pagesEMI and Layout Fundamentalsapi-3719969100% (1)
- Buck - Converters For Portable ApplicationDocument70 pagesBuck - Converters For Portable ApplicationanandNo ratings yet
- Ders - 05 - Transformers2 26 04 2013 16 15 29 2335744815 PDFDocument14 pagesDers - 05 - Transformers2 26 04 2013 16 15 29 2335744815 PDFBUĞRA UYĞURNo ratings yet
- Introduction To Hall Effect Position SensingDocument11 pagesIntroduction To Hall Effect Position SensingJose Ramón Orenes ClementeNo ratings yet
- Power Semiconductor DiodesDocument22 pagesPower Semiconductor Diodesazkasheikh19No ratings yet
- PE Chap 5. DCDC ConverterDocument87 pagesPE Chap 5. DCDC ConverterThành Trần BáNo ratings yet
- Basics of Electrical SwitchesDocument3 pagesBasics of Electrical SwitchesHsein WangNo ratings yet
- EE103 Lecture14 BGF 30 Dec 2022 Mod3 UploadDocument12 pagesEE103 Lecture14 BGF 30 Dec 2022 Mod3 UploadRaunak MukherjeeNo ratings yet
- Penta Lite Elliptical CC: Narrow Beam Module For Edge Lighting Sign BoxDocument2 pagesPenta Lite Elliptical CC: Narrow Beam Module For Edge Lighting Sign BoxDhykaAndhykaNo ratings yet
- Analyze Transistor Biasing Circuits - Load Lines (FET - MOSFET)Document19 pagesAnalyze Transistor Biasing Circuits - Load Lines (FET - MOSFET)KishenNo ratings yet
- Chap1c - BJT Small Signal Modelling (v1.2)Document65 pagesChap1c - BJT Small Signal Modelling (v1.2)Al AidenNo ratings yet
- Avi 5Document11 pagesAvi 5santosh07591A2128No ratings yet
- Electrical Diagrams - InstructionsDocument15 pagesElectrical Diagrams - InstructionsFrancisco Meza GonzalezNo ratings yet
- Power Electronics Power Electronics: Course: BookDocument16 pagesPower Electronics Power Electronics: Course: BooksufiiiiyanNo ratings yet
- Lecture 9-13 - DCDCDocument74 pagesLecture 9-13 - DCDCĐạt Nguyễn XuânNo ratings yet
- EPC2059 - Enhancement Mode Power Transistor: V, 170 V R, 9 mΩ I, 24 ADocument6 pagesEPC2059 - Enhancement Mode Power Transistor: V, 170 V R, 9 mΩ I, 24 AЕвгений ИвановNo ratings yet
- PV & PV-hybrid Design, VT 2021: Advanced Inverter TechnologiesDocument43 pagesPV & PV-hybrid Design, VT 2021: Advanced Inverter TechnologiesPablo Omar Luz PedemonteNo ratings yet
- MD5-HD14-2X 3X en Tcd210126ad 20230116 Inst WDocument1 pageMD5-HD14-2X 3X en Tcd210126ad 20230116 Inst WKun nNo ratings yet
- High Voltage Gain Buck-Boost DC-DC Converter Based On Three-State Switching Cell AnnotatedDocument8 pagesHigh Voltage Gain Buck-Boost DC-DC Converter Based On Three-State Switching Cell AnnotatedIgor hammomNo ratings yet
- FDD5N50Document8 pagesFDD5N50primero marnezNo ratings yet
- 03 Ece621 F17 TXDocument58 pages03 Ece621 F17 TXAhmed MaGdyNo ratings yet
- Eele461 Module 07Document8 pagesEele461 Module 07zhiqian wangNo ratings yet
- DatasheetDocument4 pagesDatasheetSaikumarNo ratings yet
- Managing LVDS InterfacesDocument11 pagesManaging LVDS InterfacesLgjiiNo ratings yet
- EECS 151/251A Fall 2017 Digital Design and Integrated CircuitsDocument45 pagesEECS 151/251A Fall 2017 Digital Design and Integrated CircuitsindranilhNo ratings yet
- FQP6N50C: 500V N-Channel MOSFETDocument8 pagesFQP6N50C: 500V N-Channel MOSFETHenry ToroNo ratings yet
- Type TA Class 10: Thermal Overload RelaysDocument18 pagesType TA Class 10: Thermal Overload RelaysKwong Hwo TiangNo ratings yet
- Bien Doi DC-DC Ly ThuyetDocument82 pagesBien Doi DC-DC Ly ThuyetCỏ DươngNo ratings yet
- Syllabus Transformers (EE 1000) : DC MachinesDocument14 pagesSyllabus Transformers (EE 1000) : DC MachinesKuroko TetsuyaNo ratings yet
- System ModelingDocument64 pagesSystem ModelingShuvo ShahedNo ratings yet
- Voltage Source Parallel Resonant Class E InverterDocument10 pagesVoltage Source Parallel Resonant Class E InverterHari Krishnan k kNo ratings yet
- Unr 3.3-8 D5Document4 pagesUnr 3.3-8 D5Cheng Yi TsaiNo ratings yet
- The Topics That We Will Covered in This Class Is:: - Earthing Switch OperationDocument6 pagesThe Topics That We Will Covered in This Class Is:: - Earthing Switch OperationMd. RakibNo ratings yet
- Edc 3 Field Effect TransistorDocument8 pagesEdc 3 Field Effect Transistorsherwincalma189No ratings yet
- 02 - Sect 7 5 The Canonical Model - Sect7 5Document14 pages02 - Sect 7 5 The Canonical Model - Sect7 5Ananatha KarthikNo ratings yet
- Chapter 1 IntroductionDocument18 pagesChapter 1 IntroductionCửu Nguyễn ViếtNo ratings yet
- Transistor ModellingDocument48 pagesTransistor Modellingkathreen mae fabianaNo ratings yet
- Power Electronics Power Electronics: Course: BookDocument19 pagesPower Electronics Power Electronics: Course: BooksufiiiiyanNo ratings yet
- Datasheet FDP7N50Document10 pagesDatasheet FDP7N50Anonymous fAL3CNtUiNo ratings yet
- Labs Will Start at 2:30 PM Every Tuesday: EE210 Slide 1Document10 pagesLabs Will Start at 2:30 PM Every Tuesday: EE210 Slide 1Sallie JohnsonNo ratings yet
- AlksfasdfDocument8 pagesAlksfasdfdlsgdf fgpohfNo ratings yet
- Magna: BUZ900 BUZ901Document4 pagesMagna: BUZ900 BUZ901rory957No ratings yet
- 1.1 Introduction To Power Processing!Document16 pages1.1 Introduction To Power Processing!Jahangeer SoomroNo ratings yet
- 2.transistor ModellingDocument31 pages2.transistor ModellingRohit KumarNo ratings yet
- 2 - Analog Signal ProcessingDocument22 pages2 - Analog Signal ProcessingTuanHungNo ratings yet
- TC6215 N-And P-Channel Enhancement-Mode Dual MOSFET: Features General DescriptionDocument5 pagesTC6215 N-And P-Channel Enhancement-Mode Dual MOSFET: Features General DescriptionfelipekillerNo ratings yet
- Fuji Power Mos-Fet Julio 25 Del 2022 01Document11 pagesFuji Power Mos-Fet Julio 25 Del 2022 01HENRY MEZANo ratings yet
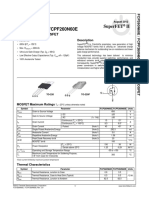
- Superfet Ii Fcp260N60E / Fcpf260N60E: 600V N-Channel MosfetDocument10 pagesSuperfet Ii Fcp260N60E / Fcpf260N60E: 600V N-Channel MosfetAlexandros BobNo ratings yet
- Datasheet MOSFET - 2N7000 - Supertex IIIDocument6 pagesDatasheet MOSFET - 2N7000 - Supertex IIICristian Daniel BerettaNo ratings yet
- MJD340 (NPN), MJD350 (PNP) High Voltage Power Transistors: DPAK For Surface Mount ApplicationsDocument8 pagesMJD340 (NPN), MJD350 (PNP) High Voltage Power Transistors: DPAK For Surface Mount Applicationshalil ibrahim soysalNo ratings yet
- Module-I Power Semiconductor Devices: Prepared by Jeena John Asst. Prof. in Eee Soe, CusatDocument50 pagesModule-I Power Semiconductor Devices: Prepared by Jeena John Asst. Prof. in Eee Soe, CusatJEENA JOHNNo ratings yet
- Ob 2223 HCDocument11 pagesOb 2223 HCRivaldyNo ratings yet
- 6.Opamp-ParametersDocument21 pages6.Opamp-ParametersGiáp TrầnNo ratings yet
- EE290C - Spring 2011 A Warning : Lecture 10: Timing: PLL/DLL BasicsDocument2 pagesEE290C - Spring 2011 A Warning : Lecture 10: Timing: PLL/DLL BasicsFahmida Pervin BrishtyNo ratings yet
- EE290C - Spring 2011 RX FIR Equalizers: - Currently Not Very Popular - Why?Document4 pagesEE290C - Spring 2011 RX FIR Equalizers: - Currently Not Very Popular - Why?Fahmida Pervin BrishtyNo ratings yet
- Lecture06 Perf Analysis 6upDocument5 pagesLecture06 Perf Analysis 6upFahmida Pervin BrishtyNo ratings yet
- EE290C - Spring 2011 CTLE Adaptation Block DiagramDocument3 pagesEE290C - Spring 2011 CTLE Adaptation Block DiagramFahmida Pervin BrishtyNo ratings yet
- Lecture05 Equalization Tech 6upDocument5 pagesLecture05 Equalization Tech 6upFahmida Pervin BrishtyNo ratings yet
- EE290C - Spring 2011: - Several Issues To Watch Out ForDocument2 pagesEE290C - Spring 2011: - Several Issues To Watch Out ForFahmida Pervin BrishtyNo ratings yet
- EE290C - Spring 2011 Course Prerequisites: High-Speed Electrical Interface Circuit Design Lecture 1: IntroductionDocument4 pagesEE290C - Spring 2011 Course Prerequisites: High-Speed Electrical Interface Circuit Design Lecture 1: IntroductionFahmida Pervin BrishtyNo ratings yet
- Lecture04 Timing Basics 6upDocument4 pagesLecture04 Timing Basics 6upFahmida Pervin BrishtyNo ratings yet
- Oracle Database Appliance Help Desk Support Consultant - Online AssessmentDocument35 pagesOracle Database Appliance Help Desk Support Consultant - Online AssessmentashisNo ratings yet
- System ArchitectureDocument34 pagesSystem ArchitecturesumanNo ratings yet
- Brooklyn DAC+ ManualDocument24 pagesBrooklyn DAC+ ManualAndrew BryantNo ratings yet
- 330 0218 R15.0Document10 pages330 0218 R15.0mch79No ratings yet
- Intensi-Fi™: Draft-802.11N Product FamilyDocument2 pagesIntensi-Fi™: Draft-802.11N Product FamilyGuilherme Ribeiro BarbosaNo ratings yet
- Competitive Programming RoadmapDocument6 pagesCompetitive Programming RoadmapVikash YadavNo ratings yet
- Final ProjectDocument26 pagesFinal ProjectMuhammad Shahzaib SamiNo ratings yet
- Lenovo Ih81mDocument36 pagesLenovo Ih81mVikings of KarnatakaNo ratings yet
- Dell Emc Poweredge R750: General Purpose Server Optimized To Address The Most Demanding WorkloadsDocument3 pagesDell Emc Poweredge R750: General Purpose Server Optimized To Address The Most Demanding Workloadsit4728No ratings yet
- Reanibex 300 - Presentacion 2013Document17 pagesReanibex 300 - Presentacion 2013Josiel MarlosNo ratings yet
- Chromebook User GuideDocument1 pageChromebook User GuideПолина МиховаNo ratings yet
- Fall Semester 2021-22 CSE1007 - Java Programming Lab Practice Problems On Threads and ExceptionsDocument2 pagesFall Semester 2021-22 CSE1007 - Java Programming Lab Practice Problems On Threads and ExceptionsPalanisamy VNo ratings yet
- Lab4 Djm30073-Ring CountersDocument4 pagesLab4 Djm30073-Ring CountersSyakir AiemanNo ratings yet
- Stenographer and Secretarial Assistant - Semester 1 Module 1 - Fundamentals of Shorthand and Computer HardwareDocument27 pagesStenographer and Secretarial Assistant - Semester 1 Module 1 - Fundamentals of Shorthand and Computer Hardwarevhenzhar saycoNo ratings yet
- Usecase DiagramDocument4 pagesUsecase Diagramharibabu madaNo ratings yet
- You Tube Video CatalogDocument27 pagesYou Tube Video CatalogUma SankarNo ratings yet
- Schneider - Ch16 - Inv To CS 8eDocument33 pagesSchneider - Ch16 - Inv To CS 8ePaulo SantosNo ratings yet
- Lesson 2: Online Safety, Security and Rules of Netiquette: ObjectivesDocument3 pagesLesson 2: Online Safety, Security and Rules of Netiquette: ObjectivesEissa May VillanuevaNo ratings yet
- CS506 MIDTERM SOLVED MCQS by JUNAIDDocument51 pagesCS506 MIDTERM SOLVED MCQS by JUNAIDabbas abbas khanNo ratings yet
- The Internet Quiz With AnswersDocument2 pagesThe Internet Quiz With Answersrex sedenoNo ratings yet
- Cream Cascade For G8M Dickator: UtorialDocument3 pagesCream Cascade For G8M Dickator: UtorialAuroraNo ratings yet
- Thesis Tungkol Sa KompyuterDocument7 pagesThesis Tungkol Sa KompyuterCarmen Pell100% (2)
- NinguDocument20 pagesNinguAsif BadegharNo ratings yet
- Sub-Nyquist Sampling For TDR Sensors:: Finite Rate of Innovation With Dithering Marc Ihle, Hochschule Karlsruhe, GermanyDocument21 pagesSub-Nyquist Sampling For TDR Sensors:: Finite Rate of Innovation With Dithering Marc Ihle, Hochschule Karlsruhe, GermanyFFSeriesvnNo ratings yet
- Install Sentinel CLI - Getting Started - Sentinel by HashiCorpDocument3 pagesInstall Sentinel CLI - Getting Started - Sentinel by HashiCorpRajeev GhoshNo ratings yet
- Graded Quiz Unit 3 - Attempt Review3Document14 pagesGraded Quiz Unit 3 - Attempt Review3TeoDoe MusicNo ratings yet
- Scorpion: Jendrik SeippDocument3 pagesScorpion: Jendrik SeippHarold Andrés Castañeda CastroNo ratings yet