You might also like
- ALFA LAVAL - PureBallast 3.1 - BALLAST WATER TREATMENT SYSTEM PDFDocument196 pagesALFA LAVAL - PureBallast 3.1 - BALLAST WATER TREATMENT SYSTEM PDFAleksandrNo ratings yet
- Starlink Services LLC ETC Designation Application PDFDocument39 pagesStarlink Services LLC ETC Designation Application PDFSimon AlvarezNo ratings yet
- QSP ENG 01 New Product DevelopmentDocument6 pagesQSP ENG 01 New Product DevelopmentOM BhardwajNo ratings yet
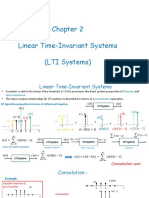
- 03 - Linear Time Invariant SystemsDocument47 pages03 - Linear Time Invariant Systems21-101162No ratings yet
- Handbook - DSP - Bme 3153Document15 pagesHandbook - DSP - Bme 3153vikas_bhat_11No ratings yet
- Fourier TDDocument12 pagesFourier TDDaniel MedauraNo ratings yet
- Fourier TDDocument12 pagesFourier TDjavovelezNo ratings yet
- Statistics ProofsDocument1 pageStatistics ProofsRaghad Al-ShaikhNo ratings yet
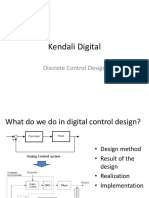
- Kendali Digital-4 - Discrete Control DesignDocument17 pagesKendali Digital-4 - Discrete Control DesignChinta WulandariNo ratings yet
- Measurement and Instrumentation Lab: Experiment 1Document44 pagesMeasurement and Instrumentation Lab: Experiment 1Pranay DumbhareNo ratings yet
- Beta Gamma Function Unit IDocument16 pagesBeta Gamma Function Unit IDhiren PanditNo ratings yet
- S02.s1-CLASE DESARROLLADA EL 20 DE AGOSTODocument9 pagesS02.s1-CLASE DESARROLLADA EL 20 DE AGOSTOalonsoalfredo alcantara nuntonNo ratings yet
- Lecture 4&5Document13 pagesLecture 4&5onuraktas1923No ratings yet
- AssignmentDocument3 pagesAssignmentSilvia Rahmi EkasariNo ratings yet
- 2 Linear Time-Invariant SystemsDocument24 pages2 Linear Time-Invariant SystemsBến trần vănNo ratings yet
- First Order Circuits - RC and RLDocument22 pagesFirst Order Circuits - RC and RLTyspoNo ratings yet
- Math Methods SummarisationDocument10 pagesMath Methods SummarisationYM GaoNo ratings yet
- Example of Implicit Method To Solve PdesDocument5 pagesExample of Implicit Method To Solve PdesKhayrouMezerregNo ratings yet
- EEE 147 ReviewerDocument4 pagesEEE 147 Reviewerfrancojieo27No ratings yet
- Mathematics Cheat SheetDocument10 pagesMathematics Cheat SheetHồ Văn ChươngNo ratings yet
- Ejercicio Resuelto - Cinética y Reactores Homogéneos 01Document7 pagesEjercicio Resuelto - Cinética y Reactores Homogéneos 01Diego MontoyaNo ratings yet
- SS04 2023 NewDocument27 pagesSS04 2023 Newhm.quy.9223No ratings yet
- Solution 6Document2 pagesSolution 6jailanipettaiNo ratings yet
- Math 156 Final Cheat SheetDocument2 pagesMath 156 Final Cheat SheetshreyaNo ratings yet
- FireDocument2 pagesFirePs PsNo ratings yet
- Day-2, 2 February, 2022 Section 7.2 Integration by PartsDocument18 pagesDay-2, 2 February, 2022 Section 7.2 Integration by PartsTahsina TasneemNo ratings yet
- ch5 Z TransformDocument29 pagesch5 Z TransformVergielyn MatusNo ratings yet
- Random Variables + Distribution Models + Linear RegressionDocument8 pagesRandom Variables + Distribution Models + Linear RegressionBasoko_LeaksNo ratings yet
- Handout - 2 Discrete-Time SystemsDocument26 pagesHandout - 2 Discrete-Time SystemsFanuel PeterNo ratings yet
- Differentiation: Rule If F (X) Then F' (X) BasicDocument2 pagesDifferentiation: Rule If F (X) Then F' (X) BasicJo-LieAngNo ratings yet
- Mark Vincent Navarro - AssignmentDocument11 pagesMark Vincent Navarro - AssignmentMARK VINCENT NAVARRONo ratings yet
- Normal DistributionDocument5 pagesNormal DistributionMd. Nazmul Huda 1610805643No ratings yet
- DR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesDocument4 pagesDR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesIsmael hijaziNo ratings yet
- Limite de Funcții: A. Limita Funcției PolinomialeDocument6 pagesLimite de Funcții: A. Limita Funcției PolinomialeJohnBossNo ratings yet
- Limite de Funcții: A. Limita Funcției PolinomialeDocument6 pagesLimite de Funcții: A. Limita Funcției PolinomialeJohnBossNo ratings yet
- Formula SheetDocument4 pagesFormula SheetYuri ParkNo ratings yet
- Integral CheatSheet AllDocument5 pagesIntegral CheatSheet AllAmir TNo ratings yet
- Worksheet Solution 4Document8 pagesWorksheet Solution 4abdelrahmanhelal13No ratings yet
- Revision On Derivatives && IntegralsDocument21 pagesRevision On Derivatives && IntegralsaagggaaaaggaaaaaNo ratings yet
- Discrete Uniform DistributionDocument7 pagesDiscrete Uniform DistributionRani GarginalNo ratings yet
- 2850-361 Sample Formulae Sheet v1-0 PDFDocument3 pages2850-361 Sample Formulae Sheet v1-0 PDFMatthew SimeonNo ratings yet
- C) Calculus Sheet SolutionsDocument4 pagesC) Calculus Sheet SolutionsHaoyu WangNo ratings yet
- Final Formula SheetDocument4 pagesFinal Formula SheetKatarina RivenNo ratings yet
- Sinais e Sistemas - UFLA Atividade Remota 3Document4 pagesSinais e Sistemas - UFLA Atividade Remota 3MarcosNo ratings yet
- Formula. Basic CalculusDocument1 pageFormula. Basic Calculusjarenhndsm.placiegoNo ratings yet
- Distribucion de Poisson e Introduccion A Las Distribuciones ContinuasDocument8 pagesDistribucion de Poisson e Introduccion A Las Distribuciones ContinuasAlejandro Hernandez PinedaNo ratings yet
- Formulas EstadísticaDocument1 pageFormulas Estadísticaalbaapariciovicario02No ratings yet
- ELEN3012 Quizz 3 SolutionDocument5 pagesELEN3012 Quizz 3 SolutionBongani MofokengNo ratings yet
- Steady State ErrorDocument4 pagesSteady State ErrorAhmed KhaledNo ratings yet
- Resumen Ecuaciones Temas 5, 6 y 7 PDFDocument3 pagesResumen Ecuaciones Temas 5, 6 y 7 PDFScottyNo ratings yet
- Lecture 4Document22 pagesLecture 4khaddamoazNo ratings yet
- Clas 3Document1 pageClas 3CURSOS MENDOZANo ratings yet
- 7.definite Integrals: 1. Fundamental Theorem of Integral CalculusDocument4 pages7.definite Integrals: 1. Fundamental Theorem of Integral Calculuskartikey papnoiNo ratings yet
- Worksheet Solution 3Document10 pagesWorksheet Solution 3abdelrahmanhelal13No ratings yet
- 课本附录 (二) - 公式表 Formula Sheet - finalDocument2 pages课本附录 (二) - 公式表 Formula Sheet - finalluoyifei1988No ratings yet
- Carga Escalonada DinamicaDocument3 pagesCarga Escalonada DinamicaRicardo Carpio JaramilloNo ratings yet
- CHE 330 Example For Annulus FlowDocument4 pagesCHE 330 Example For Annulus FlowShodmon TolibovNo ratings yet
- SS04 - 2022S1 Signal and SystemDocument23 pagesSS04 - 2022S1 Signal and SystemThúy Nguyễn ThịNo ratings yet
- BC Calculus ReviewDocument29 pagesBC Calculus ReviewKawan EngNo ratings yet
- Procesos Con Gas IdealDocument2 pagesProcesos Con Gas IdealAlejandra VergaraNo ratings yet
- Calculus 5 - Derivatives ApplicationDocument9 pagesCalculus 5 - Derivatives ApplicationsaradsamundrachNo ratings yet
- Chap 05Document25 pagesChap 05Joseph IbrahimNo ratings yet
- 10a Limited Company RevisionDocument3 pages10a Limited Company RevisionJoseph IbrahimNo ratings yet
- 06b Introduction To Financial Accounting and Financial Statements LectureDocument44 pages06b Introduction To Financial Accounting and Financial Statements LectureJoseph IbrahimNo ratings yet
- Chapter 2 - Power Semiconductor SwitchesDocument25 pagesChapter 2 - Power Semiconductor SwitchesJoseph IbrahimNo ratings yet
- Chapter 3 - Basic Electrical and Magnetic Circuit ConceptsDocument26 pagesChapter 3 - Basic Electrical and Magnetic Circuit ConceptsJoseph IbrahimNo ratings yet
- EECE340 Lecture1 IntroDocument32 pagesEECE340 Lecture1 IntroJoseph IbrahimNo ratings yet
- Syllabus For Political Science 1301: Introduction To International RelationsDocument10 pagesSyllabus For Political Science 1301: Introduction To International RelationsJoseph IbrahimNo ratings yet
- Course Number: EECE 473 Course Title: Power Electronics (3 Credits) Catalogue DescriptionDocument3 pagesCourse Number: EECE 473 Course Title: Power Electronics (3 Credits) Catalogue DescriptionJoseph IbrahimNo ratings yet
- Linear Time-Invariant SystemsDocument30 pagesLinear Time-Invariant SystemsJoseph IbrahimNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- EECE340 Lecture5 FeedbackDocument70 pagesEECE340 Lecture5 FeedbackJoseph IbrahimNo ratings yet
- EECE340 Lecture2 LTI SystemsDocument30 pagesEECE340 Lecture2 LTI SystemsJoseph IbrahimNo ratings yet
- EECE 340 EECE 340: Signals and SystemsDocument23 pagesEECE 340 EECE 340: Signals and SystemsJoseph IbrahimNo ratings yet
- Continuous-Time Signals and SystemsDocument37 pagesContinuous-Time Signals and SystemsJoseph IbrahimNo ratings yet
- Kaled, A. - Modelling and Theoretical Analysis of Laminar Flow and Heat TransferDocument21 pagesKaled, A. - Modelling and Theoretical Analysis of Laminar Flow and Heat TransferElios SequiNo ratings yet
- 10079-CV-LC-001-00 Level Indicators (Revision 01)Document24 pages10079-CV-LC-001-00 Level Indicators (Revision 01)Kunal JhinganNo ratings yet
- Ebs Enterprise Command Center Quick Start GuideDocument7 pagesEbs Enterprise Command Center Quick Start GuideKashif IqbalNo ratings yet
- Make $35 Per Hour On PayPal NO Investment PDFDocument62 pagesMake $35 Per Hour On PayPal NO Investment PDFberrahou mohamed salihNo ratings yet
- LogfileDocument227 pagesLogfilechetan choudhariNo ratings yet
- (Devices, Circuits, and Systems) Vikas Choudhary-MEMS - Fundamental Technology and applications-CRC Press (2013) PDFDocument465 pages(Devices, Circuits, and Systems) Vikas Choudhary-MEMS - Fundamental Technology and applications-CRC Press (2013) PDFSabir AliNo ratings yet
- Pressure Vessels 2 PDFDocument24 pagesPressure Vessels 2 PDFDasari VenkateshNo ratings yet
- Hino-ePc System Operating Manual PDFDocument124 pagesHino-ePc System Operating Manual PDFVerónica Maila FigueroaNo ratings yet
- ARNU24GTBB4Document2 pagesARNU24GTBB4Cristian monsalve mendozaNo ratings yet
- C BOOKnewDocument187 pagesC BOOKnewMani KandanNo ratings yet
- PMD-B200P Software Update Guide Version 2.0Document4 pagesPMD-B200P Software Update Guide Version 2.0Nikola NanevskiNo ratings yet
- Chapter 2 Research Methodology Report To Understand The Consumer Awareness and Perception Towards Electric BikesDocument4 pagesChapter 2 Research Methodology Report To Understand The Consumer Awareness and Perception Towards Electric Bikesphebe vargheseNo ratings yet
- Principles of NetworkingDocument57 pagesPrinciples of Networkingscoffy shaNo ratings yet
- 998-20894871 - Update Uniflair HXCV - GMA-US - Brochure - QA2Document8 pages998-20894871 - Update Uniflair HXCV - GMA-US - Brochure - QA2Pablo gilNo ratings yet
- Essie TV Cabinet - Large - Black - Laura JamesDocument1 pageEssie TV Cabinet - Large - Black - Laura JamesNbch NightNo ratings yet
- KCS101T - QP 2020 21Document2 pagesKCS101T - QP 2020 21manishNo ratings yet
- Nevastane SLDocument4 pagesNevastane SLronnysiguasNo ratings yet
- A320NEO-B12-0009.2, NEO 36 Diffs, R4 170817Document80 pagesA320NEO-B12-0009.2, NEO 36 Diffs, R4 170817simsimsom100% (2)
- Microsoft Windows Powered Pocket PC 2003 SDKDocument4 pagesMicrosoft Windows Powered Pocket PC 2003 SDKdallyNo ratings yet
- National Institute of Technology, DelhiDocument2 pagesNational Institute of Technology, DelhiAdhiraj choudharyNo ratings yet
- Ethiopian RP Valuation Occupational Quality Standard - Assist in Listing Properties For Sale-LeaseDocument11 pagesEthiopian RP Valuation Occupational Quality Standard - Assist in Listing Properties For Sale-LeaseTekebaNo ratings yet
- Air Compressor Sizing - KaeserDocument60 pagesAir Compressor Sizing - KaeserRebecca SchroederNo ratings yet
- 09-Chapter 9 Safety in Robotics and Manufacturing Automation FinalDocument43 pages09-Chapter 9 Safety in Robotics and Manufacturing Automation FinalBenu MadhabNo ratings yet
- 5111 Deutz-Fahr - Serie 5 e Serie 5 TTV - Nd-Ba 2Document24 pages5111 Deutz-Fahr - Serie 5 e Serie 5 TTV - Nd-Ba 2Oleg KuryanNo ratings yet
- Ch-2 Mat MGMTDocument14 pagesCh-2 Mat MGMTdanielnebeyat7No ratings yet
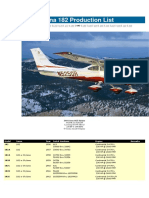
- Cessna 182 Production List: Home 140 150 152 162 170 172 175 177 180 185 188 195 205 206 207 208 210 305Document4 pagesCessna 182 Production List: Home 140 150 152 162 170 172 175 177 180 185 188 195 205 206 207 208 210 305Noelia ChNo ratings yet
- HTR900 Inspection, Maintenance, and TestingDocument27 pagesHTR900 Inspection, Maintenance, and TestingVicente Regulez FernandezNo ratings yet