You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
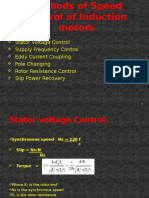
- Speed Control 3-Ph IMDocument5 pagesSpeed Control 3-Ph IMuttamNo ratings yet
- Induction Motor PDFDocument26 pagesInduction Motor PDFishak789100% (1)
- Induction Machine-2020Document95 pagesInduction Machine-2020Bharat SinghNo ratings yet
- Chapter 5 - Induction MotorDocument26 pagesChapter 5 - Induction MotorarifulNo ratings yet
- 8 3-Ph. Ind Motor Starting & Speed ControlDocument26 pages8 3-Ph. Ind Motor Starting & Speed ControlFos AlharbiNo ratings yet
- Intro To AC Drives 1Document25 pagesIntro To AC Drives 1Nur AinaqilahNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- AC Machines ControlDocument27 pagesAC Machines ControlMohamed HadadjNo ratings yet
- STL Cheat Sheet by AlphabetDocument18 pagesSTL Cheat Sheet by Alphabetmelad yousefNo ratings yet
- Induction Motor 2003Document24 pagesInduction Motor 2003hdrzaman9439No ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed Controlsolo400060% (10)
- EE 205 Lecture 30Document14 pagesEE 205 Lecture 30Akshat SharmaNo ratings yet
- ECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Document9 pagesECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Tran Nguyen KhangNo ratings yet
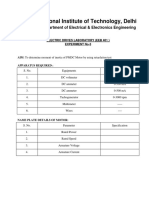
- EXPERIMENT NO 3 (AutoRecovered)Document4 pagesEXPERIMENT NO 3 (AutoRecovered)Kabish ShresthaNo ratings yet
- Induction Moptor Speed ControlDocument28 pagesInduction Moptor Speed ControlHarshil GuptaNo ratings yet
- Induction Motor Drive PDFDocument8 pagesInduction Motor Drive PDFSwostik RoutNo ratings yet
- Induction Machines - Asynchronous MachinesDocument43 pagesInduction Machines - Asynchronous MachinesMustafa ÖzdemirNo ratings yet
- Experiment #6: Three Phase Induction MotorDocument4 pagesExperiment #6: Three Phase Induction MotorAhmad Abu AlasalNo ratings yet
- Experiment #6: Three Phase Induction MotorDocument4 pagesExperiment #6: Three Phase Induction MotorRichards Ðånte WisdomNo ratings yet
- Basic Principles of MotorDocument14 pagesBasic Principles of MotorAnkit AggarwalNo ratings yet
- 4.static Kramer Drive, Variable Frequency Variable VoltageDocument8 pages4.static Kramer Drive, Variable Frequency Variable VoltageJanani RangarajanNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- Soal UTS 2017Document6 pagesSoal UTS 2017Kukuh WidarsonoNo ratings yet
- 3-Working Principle of ImDocument13 pages3-Working Principle of ImsatvikNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Bee Unit4 Lecture2Document7 pagesBee Unit4 Lecture2haiderNo ratings yet
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Chapter 3 - Induction Motor ContDocument37 pagesChapter 3 - Induction Motor ContMuhammadNo ratings yet
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNo ratings yet
- Elx 311 Chap 7 SlidesDocument23 pagesElx 311 Chap 7 SlidesDaniyar SeytenovNo ratings yet
- Module 7 - Ee 137Document4 pagesModule 7 - Ee 137Kevin Jash LingatingNo ratings yet
- Induction Motor Drives - Ws - Ned MohanDocument53 pagesInduction Motor Drives - Ws - Ned MohanTuấn AnhNo ratings yet
- AC Vector Drives 1 RevisionDocument26 pagesAC Vector Drives 1 Revisionleo232No ratings yet
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorDocument12 pagesPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarNo ratings yet
- 02 Single Phase Im 02Document8 pages02 Single Phase Im 02Suleiman Abubakar AuduNo ratings yet
- Et Cs PDFDocument33 pagesEt Cs PDFsahil borichaNo ratings yet
- Lecture Note - ED - Speed Control of IMDocument5 pagesLecture Note - ED - Speed Control of IMsashaikhNo ratings yet
- Machines Lab ManualDocument124 pagesMachines Lab ManualpurushothNo ratings yet
- Induction Motor DrivesDocument70 pagesInduction Motor DrivesAshwin Gopinath80% (5)
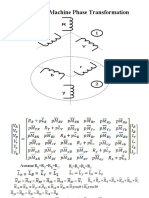
- Induction Machine Phase TransformationDocument20 pagesInduction Machine Phase Transformation7sn omerNo ratings yet
- Experiments EMS IIDocument117 pagesExperiments EMS IIOsama Tahir100% (1)
- EDCM2Document19 pagesEDCM2yanith kumarNo ratings yet
- Ee 316 - Electrical Machines 1 Week 9: E Kϕn ↓ I V E ↓ R T Kϕ I ↑Document7 pagesEe 316 - Electrical Machines 1 Week 9: E Kϕn ↓ I V E ↓ R T Kϕ I ↑Laurence Abrogena AlmazanNo ratings yet
- Ied Unit VDocument8 pagesIed Unit VRudra Kumar MishraNo ratings yet
- Wound Rotor Induction Generators (Wrigs) : Steady State: Magnetic Cores Windings and Their Mmfs Slip-Rings and BrushesDocument36 pagesWound Rotor Induction Generators (Wrigs) : Steady State: Magnetic Cores Windings and Their Mmfs Slip-Rings and BrushesKiyamatur RahamanNo ratings yet
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocument13 pagesIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimNo ratings yet
- Chapter 5Document86 pagesChapter 5Selva SamNo ratings yet
- National Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringDocument6 pagesNational Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringKomal SinghNo ratings yet
- CH 5 6 7Document54 pagesCH 5 6 7Usman0% (1)
- EMF Injection On Rotor CircuitDocument8 pagesEMF Injection On Rotor CircuitPrashant TiwariNo ratings yet
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocument25 pagesAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958No ratings yet
- A Study of Converter Rating For Brushless DFIG Wind TurbinesDocument4 pagesA Study of Converter Rating For Brushless DFIG Wind Turbinesehsan cheraghpourNo ratings yet
- 2 Lva1 App6891Document13 pages2 Lva1 App6891gouravNo ratings yet
- Induction Machines & Synchrnous Machines New-2Document74 pagesInduction Machines & Synchrnous Machines New-2thamizmaniNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Exp-3 (Speed Control by V-F MethodDocument4 pagesExp-3 (Speed Control by V-F MethoduttamNo ratings yet
- Indian Institute of Technology (Indian School of Mines) DhanbadDocument2 pagesIndian Institute of Technology (Indian School of Mines) DhanbaduttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document6 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document5 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document4 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Compiled CourseStructure Syllabus 8-8-2020Document43 pagesCompiled CourseStructure Syllabus 8-8-2020uttamNo ratings yet
- Applied Electrical Engineering SyllabusDocument2 pagesApplied Electrical Engineering SyllabusuttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document5 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Real Time Data Acquisition SystemDocument34 pagesReal Time Data Acquisition SystemuttamNo ratings yet
- Lecture 07 - 09 - 2020Document5 pagesLecture 07 - 09 - 2020uttamNo ratings yet
- Note1-Linked ListDocument10 pagesNote1-Linked ListuttamNo ratings yet
- ArrayDocument5 pagesArrayuttamNo ratings yet
- Examples: Bubble Sort, Insertion Sort, Merge Sort, Quick Sort, Heap SortDocument10 pagesExamples: Bubble Sort, Insertion Sort, Merge Sort, Quick Sort, Heap SortuttamNo ratings yet
- DSA 1 Note-An IntroductionDocument6 pagesDSA 1 Note-An IntroductionuttamNo ratings yet
- Lecture 09 - 10 - 2020 (Array)Document2 pagesLecture 09 - 10 - 2020 (Array)uttamNo ratings yet
- Single End, Known As Top. Last Element Inserted Is Deleted First That's Why It Is LIFODocument5 pagesSingle End, Known As Top. Last Element Inserted Is Deleted First That's Why It Is LIFOuttamNo ratings yet
- Informally: Algorithm Input OutputDocument34 pagesInformally: Algorithm Input OutpututtamNo ratings yet
- Binary Search Tree:: PropertyDocument6 pagesBinary Search Tree:: PropertyuttamNo ratings yet
- Induction Machine: 1. Slip and Rotor FrequencyDocument8 pagesInduction Machine: 1. Slip and Rotor FrequencyuttamNo ratings yet
- Module-2 - Phase Controlled RectifierDocument80 pagesModule-2 - Phase Controlled RectifieruttamNo ratings yet
- Current AffairsDocument38 pagesCurrent AffairsmnsprtmNo ratings yet
- 1976Document218 pages1976Mohamed Ibrahim RagabNo ratings yet
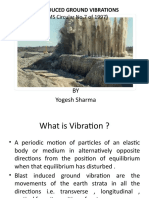
- Blast Induced Ground Vibrations (DGMS Circular No.7 of 1997)Document12 pagesBlast Induced Ground Vibrations (DGMS Circular No.7 of 1997)Yogesh SharmaNo ratings yet
- Unit-2 Sensors Pressure SensorsDocument29 pagesUnit-2 Sensors Pressure Sensors17 CSE Lokesh VNo ratings yet
- Electric Circuit Analysis II: Center For Advanced Studies in Engineering, Islamabad Electronics LabDocument14 pagesElectric Circuit Analysis II: Center For Advanced Studies in Engineering, Islamabad Electronics LabIrfan HaiderNo ratings yet
- Electric Bell AnsDocument4 pagesElectric Bell AnsManishaNo ratings yet
- Aficio SG 3110SFNWDocument41 pagesAficio SG 3110SFNWOFBA srlNo ratings yet
- Chapter 17 The Telephone Circuit Tomasi Review PDFDocument9 pagesChapter 17 The Telephone Circuit Tomasi Review PDFashwiniNo ratings yet
- Chapter Eight Semiconductor Crystals: ElementsDocument50 pagesChapter Eight Semiconductor Crystals: ElementsKhanh Nguyen HuuNo ratings yet
- Deliverable REALISEGRID Hvdc-HvacDocument75 pagesDeliverable REALISEGRID Hvdc-HvacJose ValdiviesoNo ratings yet
- 3.3.1.1 Progressive WavesDocument62 pages3.3.1.1 Progressive WavesotwadiNo ratings yet
- Commissioning Service Department Commissioning Standard Test Formats Description: Low Impedance Busbar Protection Relay Type - 7Ss522Document17 pagesCommissioning Service Department Commissioning Standard Test Formats Description: Low Impedance Busbar Protection Relay Type - 7Ss522Arun KumarNo ratings yet
- Percentage-Differential: For The Protection of AC Rotating Machinery and Power TransformersDocument4 pagesPercentage-Differential: For The Protection of AC Rotating Machinery and Power TransformersakayhanafiahNo ratings yet
- Ejercicios 2.1 2.10 Chaca Duchi PeraltaDocument30 pagesEjercicios 2.1 2.10 Chaca Duchi PeraltaMaria Angelica Peralta ONo ratings yet
- Piezoelectric RoadsDocument15 pagesPiezoelectric RoadsSreejith JithuNo ratings yet
- Murphy.25 117.tech - Inst PDFDocument2 pagesMurphy.25 117.tech - Inst PDFSgly ZemogNo ratings yet
- Microwave Engineering-Transmission LinesDocument29 pagesMicrowave Engineering-Transmission LinesKobid KarkeeNo ratings yet
- Live Line Work StandardDocument29 pagesLive Line Work Standardmarvinknow42No ratings yet
- An Overview' of Fractal Antenna Research: EngineeringDocument20 pagesAn Overview' of Fractal Antenna Research: EngineeringShesha PrasadNo ratings yet
- View Answer Your CommentsDocument23 pagesView Answer Your CommentsCh asimNo ratings yet
- Report of Servo MotorDocument3 pagesReport of Servo MotorMUHAMMAD KASHIFNo ratings yet
- Assignment 1 Solutions PDFDocument5 pagesAssignment 1 Solutions PDFshum kennethNo ratings yet
- Electrostatics - Cengage MCQDocument24 pagesElectrostatics - Cengage MCQnitishkumar.sunb100% (1)
- Marine Genset Control Electrical System MGCP Iiib Panel: Harness and Wire Electrical Schematic SymbolsDocument4 pagesMarine Genset Control Electrical System MGCP Iiib Panel: Harness and Wire Electrical Schematic SymbolspipiskaNo ratings yet
- فيزياء لغات - 2 ثانوي - ترم 1 - مذكرة 1 - ذاكروليDocument30 pagesفيزياء لغات - 2 ثانوي - ترم 1 - مذكرة 1 - ذاكروليKerlos SaeedNo ratings yet
- Ch-09 Ray Optics: Daily Practice Problem 07Document3 pagesCh-09 Ray Optics: Daily Practice Problem 07Ayush KumarNo ratings yet
- 2022-1-2-1 Chromatic SystemDocument54 pages2022-1-2-1 Chromatic Systemkristin gargantielNo ratings yet
- Reactive PowerDocument177 pagesReactive PowerSalih Ahmed ObeidNo ratings yet
- Final Exam 222 Fall 2009 BlankDocument15 pagesFinal Exam 222 Fall 2009 BlankLuis GonzalezNo ratings yet
- Electronic Shop PracticeDocument6 pagesElectronic Shop PracticeAbid TonmoyNo ratings yet