You might also like
- Settings for DC-03 drive and 1.5kW spindle under Mach3Document3 pagesSettings for DC-03 drive and 1.5kW spindle under Mach3Edy PutrantoNo ratings yet
- DatasheetDocument5 pagesDatasheetDavid Alanoca100% (8)
- Phishing Email AnalysisDocument11 pagesPhishing Email AnalysisnagarjunaNo ratings yet
- Library Management SystemDocument16 pagesLibrary Management SystemGanesh Nawle83% (6)
- REF54 Tob 750443 ENhDocument158 pagesREF54 Tob 750443 ENhUday PowarNo ratings yet
- REM54 Parlist 751784 ENc PDFDocument158 pagesREM54 Parlist 751784 ENc PDFIrfan AshrafNo ratings yet
- ABB Standard Macro: 72 ACS550 User's ManualDocument1 pageABB Standard Macro: 72 ACS550 User's Manualglenn8594No ratings yet
- ABB Standard Macro: Complete Parameter List 115Document1 pageABB Standard Macro: Complete Parameter List 115Nguyen Danh HuyNo ratings yet
- s7 200 Quick Reference Info enDocument6 pagess7 200 Quick Reference Info endangkhuyenmaiNo ratings yet
- EN - ACS580 Drives Standard Control Program Firmware ManualDocument2 pagesEN - ACS580 Drives Standard Control Program Firmware ManualRodrigo BaronNo ratings yet
- Binector List for Vector ControlDocument12 pagesBinector List for Vector ControlSafetyjoe2No ratings yet
- Ach550 2Document1 pageAch550 2MostafaElrakhawyNo ratings yet
- EPS-BS User ManualDocument8 pagesEPS-BS User ManualFeras AljaiousiNo ratings yet
- EPS BS UserManualDocument8 pagesEPS BS UserManualImran RasheedNo ratings yet
- Frequency Converter User ManualDocument52 pagesFrequency Converter User ManualStancu BranNo ratings yet
- Softwired ControllerDocument4 pagesSoftwired ControllerShreya SinghNo ratings yet
- Operation of IV5 (ELIO) - (ENG)Document41 pagesOperation of IV5 (ELIO) - (ENG)Ismail100% (2)
- User's Manual for NXL Frequency Converters Local Remote ApplicationDocument52 pagesUser's Manual for NXL Frequency Converters Local Remote ApplicationRodrigoNo ratings yet
- SR489 Setting File PDFDocument9 pagesSR489 Setting File PDFAlaa ZoraNo ratings yet
- Short Description: Terminal Extension 9374IBDocument12 pagesShort Description: Terminal Extension 9374IBCarlos MorenoNo ratings yet
- ABB Standard macro default I/O connectionsDocument1 pageABB Standard macro default I/O connectionsNicolas GonzalezNo ratings yet
- WEG CFW300 Quick Reference of Parameters 10006257607 en Es PTDocument89 pagesWEG CFW300 Quick Reference of Parameters 10006257607 en Es PTHernán ZapataNo ratings yet
- X05B DatasheetDocument5 pagesX05B DatasheetWín Bolotano De GuzmanNo ratings yet
- MF ABB Testing Differential ProtectionDocument68 pagesMF ABB Testing Differential ProtectionGabriel Zenarosa LacsamanaNo ratings yet
- Lcda 608s Digital DC Servo ManualDocument22 pagesLcda 608s Digital DC Servo ManualHoàng NguyễnNo ratings yet
- FAN7000D: Low Power AmplifierDocument10 pagesFAN7000D: Low Power AmplifiervetchboyNo ratings yet
- Monitoring Relays 1-Phase True RMS AC/DC Over or Under Current Types DIB02, PIB02Document4 pagesMonitoring Relays 1-Phase True RMS AC/DC Over or Under Current Types DIB02, PIB02ShiaTVfanNo ratings yet
- ACS580 Device and Parameter InfoDocument3 pagesACS580 Device and Parameter InfoSamrong Chek BENo ratings yet
- GS ABB ACS550 Inverter Setting Table: HD HD HD HDDocument2 pagesGS ABB ACS550 Inverter Setting Table: HD HD HD HDjonathanNo ratings yet
- 10 Interrupt v22Document29 pages10 Interrupt v22Pipat NakasenoNo ratings yet
- Parameter Inverter Micromaster 430 (Supply AHU)Document1 pageParameter Inverter Micromaster 430 (Supply AHU)Mochamad Ghifar IqramullahNo ratings yet
- ACS150 Hand-Auto MacroDocument1 pageACS150 Hand-Auto MacroNicolas GonzalezNo ratings yet
- Features:: ICW1 (Initialisation Command Word One)Document4 pagesFeatures:: ICW1 (Initialisation Command Word One)Ramesh RudraNo ratings yet
- Presentation TDDDocument7 pagesPresentation TDDEsau Jose PabloNo ratings yet
- Cảm biến và nhận điện giọng nói: 24-Bit Digital Signal ProcessorDocument51 pagesCảm biến và nhận điện giọng nói: 24-Bit Digital Signal ProcessorQuân NguyễnNo ratings yet
- GS Setup Table (ABB ACS550) 2010.09.15Document1 pageGS Setup Table (ABB ACS550) 2010.09.15Evandro Jva compressoresNo ratings yet
- Vacon Lift: User'S ManualDocument53 pagesVacon Lift: User'S ManualMohammed Qaid AlathwaryNo ratings yet
- Batre LithiumDocument7 pagesBatre LithiumihsanjuNo ratings yet
- High Speed Counter - PositionDocument5 pagesHigh Speed Counter - PositionBoy Mỉm CườiNo ratings yet
- 4GLM 12232-5issue2Document6 pages4GLM 12232-5issue2api-3700809No ratings yet
- 3-Wire Macro Control for Variable Speed DriveDocument1 page3-Wire Macro Control for Variable Speed DriveNicolas GonzalezNo ratings yet
- 042 Man TruckDocument4 pages042 Man TruckFilippos100% (1)
- Vacon Cx/Cxl/Cxs Frequency Converters: Pump Control With AutochangeDocument66 pagesVacon Cx/Cxl/Cxs Frequency Converters: Pump Control With AutochangeleandroNo ratings yet
- DR A Sahu Dept of Comp SC & Engg. IIT GuwahatiDocument32 pagesDR A Sahu Dept of Comp SC & Engg. IIT GuwahatiSafa MNo ratings yet
- Design With Linear Integrated Circuits Experiment No: 1Document11 pagesDesign With Linear Integrated Circuits Experiment No: 1Nilesh SinghNo ratings yet
- 514842400.doc Profibus Settings: Profibus Address Table - Incoming DataDocument6 pages514842400.doc Profibus Settings: Profibus Address Table - Incoming DatayosfetNo ratings yet
- Xyc-600 Paramater Drive Xyc-600Document1 pageXyc-600 Paramater Drive Xyc-600andres1989mNo ratings yet
- Basic Circuit For 8051Document54 pagesBasic Circuit For 8051uatulkarNo ratings yet
- TDA7057AQDocument16 pagesTDA7057AQmzn_com0% (1)
- AFE User's ManualDocument41 pagesAFE User's ManualT V KANNANNo ratings yet
- TLE6225GDocument9 pagesTLE6225GNoelNo ratings yet
- Section 15: Diagnostics: FadalDocument14 pagesSection 15: Diagnostics: FadalChaker Ben MariemNo ratings yet
- Dual op amp device with wide supply rangeDocument7 pagesDual op amp device with wide supply rangeAlexandre Marido de AluguelNo ratings yet
- LF351 PDFDocument9 pagesLF351 PDFIsaac SosaNo ratings yet
- Datasheet ECM 3512 Digital 4pgv3 A80401 WebDocument4 pagesDatasheet ECM 3512 Digital 4pgv3 A80401 Weblgreilly4No ratings yet
- Servo Stepper Driver UK 2 HSS86Document7 pagesServo Stepper Driver UK 2 HSS86Mimo AbduNo ratings yet
- Safe - Run Starters: Reliable. Flexible. LowcostDocument4 pagesSafe - Run Starters: Reliable. Flexible. LowcostGokula Krishnan CNo ratings yet
- UPS ModBusRefList v1.8 - VARIABLES SELECCIONADAS PDFDocument3 pagesUPS ModBusRefList v1.8 - VARIABLES SELECCIONADAS PDFZuniiga AndersonNo ratings yet
- 4GLM 12232-5lde-5vDocument6 pages4GLM 12232-5lde-5vapi-3700809No ratings yet
- Integrated CircuitsDocument12 pagesIntegrated CircuitsNunFraNo ratings yet
- mc166 Kompend Bin eDocument17 pagesmc166 Kompend Bin egryzzlyNo ratings yet
- Q. Which of The Following Is Not A Major Component of Gas Turbine?Document12 pagesQ. Which of The Following Is Not A Major Component of Gas Turbine?NabarunSarmaNo ratings yet
- Q. Which of The Following Is Not A Major Component of Gas Turbine?Document12 pagesQ. Which of The Following Is Not A Major Component of Gas Turbine?NabarunSarmaNo ratings yet
- ACS800 Multidrive Speed ControlDocument1 pageACS800 Multidrive Speed ControlNabarunSarmaNo ratings yet
- Hazardous Area As Per CEA Reg 2010Document2 pagesHazardous Area As Per CEA Reg 2010NabarunSarmaNo ratings yet
- ACS800 Multidrive One Temperature SensorDocument4 pagesACS800 Multidrive One Temperature SensorNabarunSarmaNo ratings yet
- ACS800 Multidrive DTC Block DiagramDocument3 pagesACS800 Multidrive DTC Block DiagramNabarunSarmaNo ratings yet
- Buy NISHIKA Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMDocument4 pagesBuy NISHIKA Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMNabarunSarmaNo ratings yet
- Buy JYOT BRAND Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMDocument4 pagesBuy JYOT BRAND Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMNabarunSarmaNo ratings yet
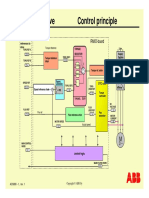
- ACS800 Multidrive Control Principle: RMIO-boardDocument5 pagesACS800 Multidrive Control Principle: RMIO-boardNabarunSarmaNo ratings yet
- Regulation PDFDocument18 pagesRegulation PDFdeepusvvpNo ratings yet
- Buy DPL Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMDocument4 pagesBuy DPL Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMNabarunSarmaNo ratings yet
- Buy KAVACH Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMDocument5 pagesBuy KAVACH Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMNabarunSarmaNo ratings yet
- Dsitribution BaordDocument4 pagesDsitribution BaordNabarunSarmaNo ratings yet
- Buy Crystal Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMDocument4 pagesBuy Crystal Rubber Gloves For Electrical Purposes Type 2 (Guuntlet Type) For Use at Voltge Not Exceeding 1100V, AC Rms Online - GeMNabarunSarmaNo ratings yet
- OIL Calculation For 30ftDocument2 pagesOIL Calculation For 30ftNabarunSarmaNo ratings yet
- Regulation Elec Safety PDFDocument367 pagesRegulation Elec Safety PDFdeepusvvpNo ratings yet
- OIL Calculation For 40ftDocument2 pagesOIL Calculation For 40ftNabarunSarmaNo ratings yet
- Internal Customer Orientationimproved Relationshipstakeholder Valuegender Budgeting EnvironmentDocument1 pageInternal Customer Orientationimproved Relationshipstakeholder Valuegender Budgeting EnvironmentNabarunSarmaNo ratings yet
- Processproduct ImprovementsimplicationDocument2 pagesProcessproduct ImprovementsimplicationNabarunSarmaNo ratings yet
- Timeenergyrecyclesalvage ImplicationDocument1 pageTimeenergyrecyclesalvage ImplicationNabarunSarmaNo ratings yet
- Oil Mines RegulationsDocument52 pagesOil Mines RegulationsAnonymous 6ZWS6IG2J9No ratings yet
- Memo CableDocument1 pageMemo CableNabarunSarmaNo ratings yet
- SynopsisDocument1 pageSynopsisNabarunSarmaNo ratings yet
- Part 2Document71 pagesPart 2NabarunSarmaNo ratings yet
- Reservation For LED of Highmast PDFDocument1 pageReservation For LED of Highmast PDFNabarunSarmaNo ratings yet
- SynopsisDocument1 pageSynopsisNabarunSarmaNo ratings yet
- Minutes of Departmental Safety Meeting on 21st January 2018Document2 pagesMinutes of Departmental Safety Meeting on 21st January 2018NabarunSarmaNo ratings yet
- Grand Canyon Trip Planner by Canyon ToursDocument6 pagesGrand Canyon Trip Planner by Canyon ToursNabarunSarmaNo ratings yet
- M.Sc. in Information Technology (M.Sc.-IT) : Institute of Distance and Open Learning Gauhati UniversityDocument2 pagesM.Sc. in Information Technology (M.Sc.-IT) : Institute of Distance and Open Learning Gauhati UniversityNabarunSarmaNo ratings yet
- MultiCon Emulator QGUSXEN v.1.00.002Document8 pagesMultiCon Emulator QGUSXEN v.1.00.002Julienne SaenzNo ratings yet
- Cisco EMEAR en Catalog v5Document108 pagesCisco EMEAR en Catalog v5Kris LazikNo ratings yet
- Review your answers, feedback, and question scoresDocument17 pagesReview your answers, feedback, and question scoresSrdjanVuksan100% (1)
- SUN Sun Certified System Administrator For Solaris 10 OS - Part 1Document7 pagesSUN Sun Certified System Administrator For Solaris 10 OS - Part 1bouidaNo ratings yet
- Cognizant Trizetto Keyword Loader For FacetsDocument2 pagesCognizant Trizetto Keyword Loader For FacetsKavitha RamalingamNo ratings yet
- Program-Electronics and Telecommunication Engg: Unit 3-Physical LayerDocument42 pagesProgram-Electronics and Telecommunication Engg: Unit 3-Physical LayerANIKET BABARNo ratings yet
- Data Mining Concepts and Techniques by Jiawei HanDocument4 pagesData Mining Concepts and Techniques by Jiawei HanSandeep H SNo ratings yet
- Ti50a01a10-02en 001Document104 pagesTi50a01a10-02en 001Dhirender DagarNo ratings yet
- OMU 9.10 Firewall ConceptConfig PDFDocument86 pagesOMU 9.10 Firewall ConceptConfig PDFJulien SorelNo ratings yet
- 915Document423 pages915juan carlosNo ratings yet
- ISO On TCP For S7-300 Integrated ProfinetDocument9 pagesISO On TCP For S7-300 Integrated Profinetdarwis_idNo ratings yet
- D1T4 - Paulus Meesen and Don Mulders - A Passive Listing Ransomware DetectorDocument43 pagesD1T4 - Paulus Meesen and Don Mulders - A Passive Listing Ransomware Detectorkasama moriNo ratings yet
- Role of Artificial Intelligence (AI) in Marketing: August 2021Document14 pagesRole of Artificial Intelligence (AI) in Marketing: August 2021Ankita SinghNo ratings yet
- PLC and NFC ApplicationDocument8 pagesPLC and NFC Applicationahmad zailaniNo ratings yet
- NEO-6 - Hardware Integration Manual - U-BloxDocument83 pagesNEO-6 - Hardware Integration Manual - U-BloxAdriano RamosNo ratings yet
- 051796F0.sch-1 - Thu Dec 15 11:09:57 2005Document25 pages051796F0.sch-1 - Thu Dec 15 11:09:57 2005Aconatic tvhomeNo ratings yet
- Fcad5 For Acad UsersDocument56 pagesFcad5 For Acad UsersPalin AlinnNo ratings yet
- MC9S12DP256B - Processador BMW F650GSDocument126 pagesMC9S12DP256B - Processador BMW F650GSNoelNo ratings yet
- Cygnus 850: 2-Wire G.SHDSL Modem FamilyDocument2 pagesCygnus 850: 2-Wire G.SHDSL Modem FamilyPradeep Kumar YadavNo ratings yet
- HBMSU Fully Online GuideDocument9 pagesHBMSU Fully Online GuideMedo ZiyaniNo ratings yet
- Zebra ZM400-ZM600 Maint ManDocument470 pagesZebra ZM400-ZM600 Maint ManMervinSnerdNo ratings yet
- Workstation Adobe 4k GuideDocument8 pagesWorkstation Adobe 4k Guidetwo wheelsNo ratings yet
- Advanced Data Structures Lab ManualDocument81 pagesAdvanced Data Structures Lab ManualVijaya Kumar Varma60% (5)
- 21CS1202 WAD Question BANK For Students 2022Document17 pages21CS1202 WAD Question BANK For Students 2022thanushabaskarNo ratings yet
- First Automation Using StudioX - Microsoft OfficeDocument1 pageFirst Automation Using StudioX - Microsoft OfficeTRI LENo ratings yet
- 2023-03-31Document10 pages2023-03-31Ilie NedelkuNo ratings yet
- Dr. Indra Saputra, Senin, 19 Juni 23Document2 pagesDr. Indra Saputra, Senin, 19 Juni 23Vedo RivedoNo ratings yet
- RS124 ManualDocument13 pagesRS124 ManualSoakaosNo ratings yet