You might also like
- ĐA CSTKM Nguyễn Trọng Duy lớp 106181Document41 pagesĐA CSTKM Nguyễn Trọng Duy lớp 10618110 Phan Văn DũngNo ratings yet
- (123doc) - Tong-Quan-Ve-He-Truyen-Dong-Trong-May-Cnc-Mo-Phong-Noi-Suy-Tren-Matlab-Dieu-Khien-Ve-Tren-SimulinkDocument32 pages(123doc) - Tong-Quan-Ve-He-Truyen-Dong-Trong-May-Cnc-Mo-Phong-Noi-Suy-Tren-Matlab-Dieu-Khien-Ve-Tren-SimulinkHùngNo ratings yet
- Bai Bao Cao NhomDocument23 pagesBai Bao Cao NhomNguyễn Tuấn KiệtNo ratings yet
- BẢN THUYẾT MINH 14 11Document63 pagesBẢN THUYẾT MINH 14 11tobu huyNo ratings yet
- (123doc) Mo Phong Dieu Khien Toc Do Dong Co 1 Chieu Bang Matlab SimulinkDocument15 pages(123doc) Mo Phong Dieu Khien Toc Do Dong Co 1 Chieu Bang Matlab SimulinkHải Vũ100% (1)
- BTL MechatronicSys 2022Document4 pagesBTL MechatronicSys 2022Huỳnh Kim MẫnNo ratings yet
- 01.boost PHTTDocument28 pages01.boost PHTTpm0412222No ratings yet
- Control of Three Phase Thyristor Bridge 62ed4ba8Document5 pagesControl of Three Phase Thyristor Bridge 62ed4ba8Nguyễn Hải ĐăngNo ratings yet
- Bao Cao BTL CK VDK Nhom DC Motor 2Document15 pagesBao Cao BTL CK VDK Nhom DC Motor 2Vũ Tuấn PhươngNo ratings yet
- Chọn động cơ điệnDocument9 pagesChọn động cơ điệnLục Thanh TuấnNo ratings yet
- (123doc) - Thiet-Ke-Mach-Boost-Converter-Dc-DcDocument15 pages(123doc) - Thiet-Ke-Mach-Boost-Converter-Dc-DcNguyễn Văn NgọcNo ratings yet
- Dieu Khien Dong Co 1 ChieuDocument44 pagesDieu Khien Dong Co 1 ChieuTrương Văn TrọngNo ratings yet
- Bài báo cáo cuối kìqDocument18 pagesBài báo cáo cuối kìqNguyễn Tuấn KiệtNo ratings yet
- báo cáo bài tập lớn mạch buck converterDocument37 pagesbáo cáo bài tập lớn mạch buck converterTrần TuấnNo ratings yet
- DC DCDocument176 pagesDC DCĐINH ANH TÙNGNo ratings yet
- Bài thí nghiệm số 4Document9 pagesBài thí nghiệm số 4Ân Nguyễn VănNo ratings yet
- Chương 3: Thiết Kế Mạch Điều KhiểnDocument12 pagesChương 3: Thiết Kế Mạch Điều KhiểnAnh LeeNo ratings yet
- TH - Lý thuyết điều khiển tự động - 231010Document62 pagesTH - Lý thuyết điều khiển tự động - 23101025 - Nguyễn Văn TiếnNo ratings yet
- Tailieuxanh Thuyet Minh Do An Mon Hoc Chi Tiet May 217Document20 pagesTailieuxanh Thuyet Minh Do An Mon Hoc Chi Tiet May 217Trí MaiNo ratings yet
- PID (Proportional Integral Derivative) : A. Hàm truyền đạtDocument8 pagesPID (Proportional Integral Derivative) : A. Hàm truyền đạtEm Xin ChàoNo ratings yet
- ùng mạch phản hồi âm tốc độ.: b b đk đk b ưt ư b bDocument15 pagesùng mạch phản hồi âm tốc độ.: b b đk đk b ưt ư b bLê MinhNo ratings yet
- Chuong 3 BIEU DIEN MOT SO HE THONG BANG PTTTDocument85 pagesChuong 3 BIEU DIEN MOT SO HE THONG BANG PTTTNguyễn V. NhấtNo ratings yet
- Phan Tinh Toan DtcsDocument26 pagesPhan Tinh Toan DtcsKudo ShinichiNo ratings yet
- Boost ConverterDocument35 pagesBoost ConverterBùi Văn Lyd67% (3)
- btl thầy thanhDocument21 pagesbtl thầy thanhLong Vũ DuyNo ratings yet
- BaocaoVXL Nhom 2Document19 pagesBaocaoVXL Nhom 2Minh Thuan0% (1)
- Bài giảng Lý thuyết điều khiển tự động 2 - Chương 8 - Đỗ Quang Thông - 1164670Document32 pagesBài giảng Lý thuyết điều khiển tự động 2 - Chương 8 - Đỗ Quang Thông - 1164670Thắng Nguyễn KhắcNo ratings yet
- BG10. Lap Trinh Dieu Khien Toc Do DCDCDocument46 pagesBG10. Lap Trinh Dieu Khien Toc Do DCDCHuế TrầnNo ratings yet
- Nhóm 8Document35 pagesNhóm 8PBC21No ratings yet
- chỉnh lưu thiristor 1 pha xung chùm - N37Document23 pageschỉnh lưu thiristor 1 pha xung chùm - N37Long Vũ VănNo ratings yet
- Báo Cáo ĐkđtcsDocument26 pagesBáo Cáo ĐkđtcsHoàng NhậtNo ratings yet
- Báo cáo động cơ điện 1 chiềuDocument15 pagesBáo cáo động cơ điện 1 chiều20020569No ratings yet
- BÀI THÍ NGHIỆM 4Document7 pagesBÀI THÍ NGHIỆM 4Thành Công NguyễnNo ratings yet
- Dieu Khien Dong Co DC Dung Thuat Toan PidDocument19 pagesDieu Khien Dong Co DC Dung Thuat Toan PidDuy LânNo ratings yet
- Bài 5Document6 pagesBài 501. AnNo ratings yet
- Bùi Trọng Kiên - 20173998 - ReportDocument10 pagesBùi Trọng Kiên - 20173998 - ReportKiên BùiNo ratings yet
- bai tap matlab-đã chuyển đổiDocument12 pagesbai tap matlab-đã chuyển đổiLê.Q Thắng100% (1)
- bài tập KTDKTDDocument10 pagesbài tập KTDKTDNgọc QuốcNo ratings yet
- Tìm Hiểu Hệ Thống Truyền Động MáyDocument36 pagesTìm Hiểu Hệ Thống Truyền Động MáyTrần Anh TríNo ratings yet
- OZOqKOU Do An Thiet Ke He Thong Truyen Dong Co KhiDocument53 pagesOZOqKOU Do An Thiet Ke He Thong Truyen Dong Co KhiĐinh Đức DuyNo ratings yet
- DK Dubao DC KDB 3pDocument11 pagesDK Dubao DC KDB 3pTrinh Nhat HuyNo ratings yet
- Thiết kế điều khiển tự động_877154Document44 pagesThiết kế điều khiển tự động_877154Manh Nguyen TienNo ratings yet
- Đ Án TkeDocument37 pagesĐ Án TkeQuang MInh BùiNo ratings yet
- Đồ Án Chi Tiết Máy - Thiết Kế Hộp Giảm Tốc 2 Cấp Đồng Trục -Bánh Răng Nghiêng - (Download Tai Tailieutuoi.com)Document76 pagesĐồ Án Chi Tiết Máy - Thiết Kế Hộp Giảm Tốc 2 Cấp Đồng Trục -Bánh Răng Nghiêng - (Download Tai Tailieutuoi.com)Duy KhổngNo ratings yet
- BTL Chi Tiet MayDocument7 pagesBTL Chi Tiet MayWinlucky BkNo ratings yet
- DSP_FPGA-192_KTGHK_De1Document2 pagesDSP_FPGA-192_KTGHK_De1Phát Nguyễn TrọngNo ratings yet
- Vihongnam20181671 BtdkdtcsDocument14 pagesVihongnam20181671 BtdkdtcsNam ViNo ratings yet
- Nhom 30 FinalDocument44 pagesNhom 30 FinalMạnh KhổngNo ratings yet
- Bộ biến đổi PFC kiểu BoostDocument24 pagesBộ biến đổi PFC kiểu BoostThọ VũNo ratings yet
- Thiết kế bộ băm xung áp một chiều điều khiển động cơ có đảo chiều quayDocument10 pagesThiết kế bộ băm xung áp một chiều điều khiển động cơ có đảo chiều quayQuoc Huy PhamNo ratings yet
- Báo Cáo Chuyên Đề: Ngành: Công Nghệ Ktđk&Tđh CHUYÊN NGÀNH: Tự động hóa và Điều khiển TBĐCN HỌC PHẦN: Truyền động điện 2Document17 pagesBáo Cáo Chuyên Đề: Ngành: Công Nghệ Ktđk&Tđh CHUYÊN NGÀNH: Tự động hóa và Điều khiển TBĐCN HỌC PHẦN: Truyền động điện 2SƠnNo ratings yet
- Bài Báo CáoDocument13 pagesBài Báo CáoduykienhcmuteNo ratings yet
- BÀI THÍ NGHIỆM 1Document16 pagesBÀI THÍ NGHIỆM 1Nguyễn V. NhấtNo ratings yet
- TH TDL Week4Document16 pagesTH TDL Week4Đăng MinhNo ratings yet
- BTL_nhungDocument9 pagesBTL_nhungquycongle03No ratings yet
- Nhom 09 BTLDocument22 pagesNhom 09 BTLMạnh KhổngNo ratings yet
- Bài Giảng Điều Khiển Sốv3Document85 pagesBài Giảng Điều Khiển Sốv3Tùng 57 Ngô NgọcNo ratings yet
- Mo Hinh Hoa Dong Co Dien 1 ChieuDocument8 pagesMo Hinh Hoa Dong Co Dien 1 Chieuhoangmai1987No ratings yet
- 2023 04 16 春秋Document1 page2023 04 16 春秋Nguyễn Tiến HoàngNo ratings yet
- Thử nghiệm thiết bị điều khiển và giám sát dòng điện thông qua mạng GSMDocument18 pagesThử nghiệm thiết bị điều khiển và giám sát dòng điện thông qua mạng GSMQuy Nhơn Điện tửNo ratings yet
- Chương 4. Máy điện không đồng bộDocument34 pagesChương 4. Máy điện không đồng bộKhánh NguyễnNo ratings yet
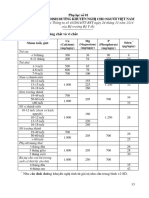
- Nhu cầu khuyến nghị dinh dưỡng cho người Việt NamDocument6 pagesNhu cầu khuyến nghị dinh dưỡng cho người Việt NamPhương TăngNo ratings yet
- De Thi Va Dap An May Dien CDKTCT 2014 2015Document12 pagesDe Thi Va Dap An May Dien CDKTCT 2014 2015Nguyễn Thị Cẩm TúNo ratings yet
- BT Giai San May Dien 7136Document10 pagesBT Giai San May Dien 7136Pham Minh TuanNo ratings yet
- .May Dien Hung 4886Document91 pages.May Dien Hung 4886Nguyễn Tiến HoàngNo ratings yet
- TT May Dien 2553Document6 pagesTT May Dien 2553Lam HostNo ratings yet
- On Dinh KI, KP, KDDocument7 pagesOn Dinh KI, KP, KDNguyễn Tiến HoàngNo ratings yet
- Tom Tat Cong Thuc May Dien 1 HCMDocument16 pagesTom Tat Cong Thuc May Dien 1 HCMNguyễn Tiến HoàngNo ratings yet
- Phan On Dinh Chinh LaiDocument5 pagesPhan On Dinh Chinh LaiNguyễn Tiến HoàngNo ratings yet
- Do Du Tru On DinhDocument4 pagesDo Du Tru On DinhNguyễn Tiến HoàngNo ratings yet
- TLHT Hệ thống điều khiển số 52 69Document18 pagesTLHT Hệ thống điều khiển số 52 69Nguyễn Tiến HoàngNo ratings yet