You might also like
- XuletaintegralsDocument1 pageXuletaintegralsAtaliaNo ratings yet
- Tema 11 Reguladors CaDocument44 pagesTema 11 Reguladors Caruben.ruiz.ruizNo ratings yet
- Tema 8 Intro Control Industrial CADocument43 pagesTema 8 Intro Control Industrial CAEnric Ramon PaisanoNo ratings yet
- 1920 Q1 P2 ResoltDocument6 pages1920 Q1 P2 ResoltUnai RubioNo ratings yet
- Pro04-Espais de BanachDocument3 pagesPro04-Espais de BanachVíctor Ballester RibóNo ratings yet
- Tema 3Document24 pagesTema 3Hanan AmarkiNo ratings yet
- Càlcul Numéric 01Document31 pagesCàlcul Numéric 01Luis PeiroNo ratings yet
- Tema 5 - Ventilació DimensionatDocument21 pagesTema 5 - Ventilació Dimensionatespinozarenato14No ratings yet
- C T 16i 1Document2 pagesC T 16i 1Oliver QchNo ratings yet
- 2021 ENCOTeoriaDocument81 pages2021 ENCOTeoriaIvan ArroyoNo ratings yet
- Tema 3 Termodinàmica Contingut 3.3Document29 pagesTema 3 Termodinàmica Contingut 3.3Xavi PozoNo ratings yet
- Camps ConservatiusDocument33 pagesCamps Conservatiusjofloru023No ratings yet
- Formulario Global PDFDocument4 pagesFormulario Global PDFgabriela parraNo ratings yet
- CorbesSuperficiesDocument31 pagesCorbesSuperficieslisosWoofNo ratings yet
- Conducció Sistemes Radials Amb Generació TèrmicDocument11 pagesConducció Sistemes Radials Amb Generació TèrmicJana Esteve TeresNo ratings yet
- Resumen ÓpticaDocument13 pagesResumen ÓpticaSalma BNo ratings yet
- 2 DestilacioMulticomponentDocument28 pages2 DestilacioMulticomponentMeta AncetaminaNo ratings yet
- Sol Activitat 3Document21 pagesSol Activitat 3Jorge Lopez BlascoNo ratings yet
- Control Autom' Atic: Mostratge I Digitalitzaci o de SenyalsDocument13 pagesControl Autom' Atic: Mostratge I Digitalitzaci o de Senyalsoriol.ibanez.rodaNo ratings yet
- Prob Series Fourier MM3Document9 pagesProb Series Fourier MM3Xavier Benejam SerranoNo ratings yet
- Parametrització de CorbesDocument11 pagesParametrització de Corbesjofloru023No ratings yet
- Tema 7Document9 pagesTema 7David Dapena CabezasNo ratings yet
- Aos 03 ProblDocument7 pagesAos 03 Problsaramartori.2002No ratings yet
- 0-CinematicaApunts 2017Document22 pages0-CinematicaApunts 2017Ana Celia Ruiz GarcíaNo ratings yet
- U01b Termodinàmica - ALUMDocument4 pagesU01b Termodinàmica - ALUMVicent J. Sala CamarenaNo ratings yet
- Teorema de Conservació Energia MecànicaDocument2 pagesTeorema de Conservació Energia MecànicaFrancisco SebastiàNo ratings yet
- 1erparcial SOLUCIONSDocument4 pages1erparcial SOLUCIONSBerta MarataNo ratings yet
- Result Prob Series Fourier (1-15) MM3 ModDocument14 pagesResult Prob Series Fourier (1-15) MM3 ModXavier Benejam SerranoNo ratings yet
- Pack Parcial Q2-16Document12 pagesPack Parcial Q2-16MarcNo ratings yet
- Mates II - Transparencies T3Document35 pagesMates II - Transparencies T3FEFIMREGNSMPORSGNo ratings yet
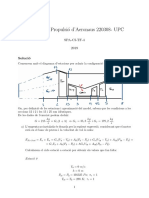
- Sistemes de Propulsi o D'aeronaus 220308-UPC: SPA-CI-TF-2 2020Document4 pagesSistemes de Propulsi o D'aeronaus 220308-UPC: SPA-CI-TF-2 2020Alex Marin JimenezNo ratings yet
- Pràctica5 PA2Document4 pagesPràctica5 PA2sNo ratings yet
- Mat3 P Gen11 (10) SolDocument8 pagesMat3 P Gen11 (10) SolPol Espinalt PiñeroNo ratings yet
- Spa Ci TF4SDocument4 pagesSpa Ci TF4SmanuelNo ratings yet
- Parcial 4 - Problemes Resolts IiDocument29 pagesParcial 4 - Problemes Resolts IiLurdes VidalNo ratings yet
- Aos 03 - ProblDocument7 pagesAos 03 - Problsaramartori.2002No ratings yet
- Integració de Camps Conservatius Sobre Corbes TancadesDocument13 pagesIntegració de Camps Conservatius Sobre Corbes Tancadesjofloru023No ratings yet
- Conducció No EstacionariaDocument18 pagesConducció No EstacionariaJana Esteve TeresNo ratings yet
- Pendulo de TorçaoDocument4 pagesPendulo de TorçaoEDUARDO ALBRERTO MBIZANo ratings yet
- Pc3 - Investigacion OperativaDocument8 pagesPc3 - Investigacion OperativaJacki Menocal HuillcaNo ratings yet
- Presentació Cinemàtica de La ReaccióDocument24 pagesPresentació Cinemàtica de La ReaccióDanielNo ratings yet
- Aos 07 - ProblDocument8 pagesAos 07 - ProblCarlos LevyNo ratings yet
- LiquidDocument13 pagesLiquidartynskuNo ratings yet
- 2009-04-17 (Solució)Document7 pages2009-04-17 (Solució)Toni LuqueNo ratings yet
- Examen-SSD-2021-2022-Recuperacio (Amb Solucions)Document10 pagesExamen-SSD-2021-2022-Recuperacio (Amb Solucions)Albert FabrechNo ratings yet
- Spa Ci TF3SDocument5 pagesSpa Ci TF3SmanuelNo ratings yet
- 12 - FísicaDocument32 pages12 - FísicaAldo TorresNo ratings yet
- FormulariDocument2 pagesFormularioriol.ibanez.rodaNo ratings yet
- Pau Tecn20jpDocument5 pagesPau Tecn20jplafdiuvhbeiasuNo ratings yet
- Platea de CimentacionDocument96 pagesPlatea de CimentacionLuis Humberto Trigoso TejadaNo ratings yet
- Exercicis Resolts Per Temes Versio 2019Document32 pagesExercicis Resolts Per Temes Versio 2019Me llamanNo ratings yet
- Càlcul Numéric 02Document27 pagesCàlcul Numéric 02Luis PeiroNo ratings yet
- MM 411 Guia de Estudio 3parDocument8 pagesMM 411 Guia de Estudio 3parEdgar JosueNo ratings yet
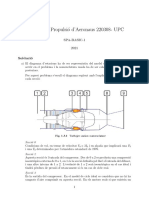
- Sistemes de Propulsi o D'aeronaus 220308-UPC: Spa-Basic-2 2021Document2 pagesSistemes de Propulsi o D'aeronaus 220308-UPC: Spa-Basic-2 2021Alex Marin JimenezNo ratings yet
- Un Proyecto Alternativo de NaciónDocument83 pagesUn Proyecto Alternativo de NaciónMisael Aiquel Gallegos100% (1)
- Spa Basic 1sDocument5 pagesSpa Basic 1smanuelNo ratings yet
- 5 Disseny de BescanviadorsDocument9 pages5 Disseny de BescanviadorsAziza SHRNo ratings yet
- Exercicis Exàmens Control UF2Document16 pagesExercicis Exàmens Control UF2ghitag02015No ratings yet