You might also like
- Edicom June Test Part 1Document7 pagesEdicom June Test Part 1Victor Añon SevillaNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesFrom EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNo ratings yet
- Qatar Education SpecialDocument24 pagesQatar Education SpecialAnil SukumaranNo ratings yet
- Thermal Overload Motor Relay ProtectionDocument7 pagesThermal Overload Motor Relay ProtectionPierre Enrique Carrasco FuentesNo ratings yet
- Xyngi2009 PDFDocument3 pagesXyngi2009 PDFNikhil Kumar SinhaNo ratings yet
- AC Motor ProtectionDocument33 pagesAC Motor ProtectionLoretta KimNo ratings yet
- Thermal Analysis of Induction and Synchronous Reluctance MotorsDocument6 pagesThermal Analysis of Induction and Synchronous Reluctance MotorsShraddha kaleNo ratings yet
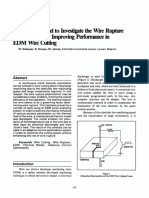
- Thermal Model To Investigate The Wire RuptureDocument12 pagesThermal Model To Investigate The Wire RuptureThi Phuong Thanh LeNo ratings yet
- Motor Thermal Overload ProtectionDocument5 pagesMotor Thermal Overload ProtectionSum BarzegaranNo ratings yet
- 10 11648 J Ijecec 20150102 13-LibreDocument6 pages10 11648 J Ijecec 20150102 13-LibrelahcenamriNo ratings yet
- A MEDIUM SCALE INDUCTION MACHINE - Vokas Theodorakis 2016 PDFDocument8 pagesA MEDIUM SCALE INDUCTION MACHINE - Vokas Theodorakis 2016 PDFtheodorakis017781No ratings yet
- 65 - Real-Time Estimation of Junction Temperature in IGBT Inverter With A Simple Parameterized Power Loss ModelDocument8 pages65 - Real-Time Estimation of Junction Temperature in IGBT Inverter With A Simple Parameterized Power Loss ModelInfy WangNo ratings yet
- C9 A.C. Motor ProtectionDocument18 pagesC9 A.C. Motor ProtectionShailesh ChettyNo ratings yet
- Fundamental of Motor ThermalDocument18 pagesFundamental of Motor ThermalOmarMatSlsNo ratings yet
- Discussion On IGBT Short-Circuit Behavior and Fault Protection SchemesDocument8 pagesDiscussion On IGBT Short-Circuit Behavior and Fault Protection SchemesTheodore KyriakopoulosNo ratings yet
- PCB-integrated Metallic Thermal Micro-Actuators: Eniko T. Enikov, Kalin LazarovDocument7 pagesPCB-integrated Metallic Thermal Micro-Actuators: Eniko T. Enikov, Kalin LazarovKarthik RaoNo ratings yet
- Type 2 Coordination Chart TeSys IE3-IE4 PDFDocument28 pagesType 2 Coordination Chart TeSys IE3-IE4 PDFDevendra RawalNo ratings yet
- Active Stator Winding Thermal Protection For Ac Motors: Pinjia Zhang Bin Lu Thomas G. HabetlerDocument9 pagesActive Stator Winding Thermal Protection For Ac Motors: Pinjia Zhang Bin Lu Thomas G. HabetlerDedi PanjaitanNo ratings yet
- Effect of Temperature Rise On The Performance of Induction MotorsDocument5 pagesEffect of Temperature Rise On The Performance of Induction MotorsBala RajuNo ratings yet
- Hydro Generators Losses Measurement in Accordance To IEEE-STD-115 and IEC-60034-2Document7 pagesHydro Generators Losses Measurement in Accordance To IEEE-STD-115 and IEC-60034-2saliyarumesh2292No ratings yet
- Design Procedure of A Permanent MagnetDocument4 pagesDesign Procedure of A Permanent MagnetJignesh LoharNo ratings yet
- Experimentally Validated Numerical Model of Thermal and Flow Processes Within The Permanent Magnet Brushless Direct Current MotorDocument10 pagesExperimentally Validated Numerical Model of Thermal and Flow Processes Within The Permanent Magnet Brushless Direct Current Motorfong jeffNo ratings yet
- 6026 PDFDocument6 pages6026 PDFManikanta SwamyNo ratings yet
- Eee-Vii-Industrial Drives and Applications U2Document9 pagesEee-Vii-Industrial Drives and Applications U2SimranNo ratings yet
- Calculation of IGBT Power LossesDocument7 pagesCalculation of IGBT Power LossessümeyyeNo ratings yet
- Approximate Loss Formulae For Estimation of IGBT SDocument7 pagesApproximate Loss Formulae For Estimation of IGBT Sjeos20132013No ratings yet
- Induction Motor Rotor Temperature Estimation Based On A High-Frequency Model of A Rotor BarDocument9 pagesInduction Motor Rotor Temperature Estimation Based On A High-Frequency Model of A Rotor BarJuan Sebas Causil Causil RamirezNo ratings yet
- Open-Loop Control of Full-Bridge Resonant Inverter For Induction Metal Surface HeatingDocument7 pagesOpen-Loop Control of Full-Bridge Resonant Inverter For Induction Metal Surface Heatingu18348794No ratings yet
- OTP PaperDocument6 pagesOTP PaperseanNo ratings yet
- Microprocessor Based Protection System FDocument13 pagesMicroprocessor Based Protection System Fkhulan876No ratings yet
- Motor Protection SiemensDocument10 pagesMotor Protection SiemensViviane MaiaNo ratings yet
- EDC Key FinalDocument17 pagesEDC Key FinalVignesh GNo ratings yet
- Optimal Design of Large Permanent Magnet Synchronous GeneratorsDocument9 pagesOptimal Design of Large Permanent Magnet Synchronous GeneratorsMurat Erhan BalciNo ratings yet
- Measurementand Control of Non-Eletrical QuantitiesDocument9 pagesMeasurementand Control of Non-Eletrical QuantitiesNiño John JaymeNo ratings yet
- Thermal Modeling of Electrical TransformersDocument6 pagesThermal Modeling of Electrical TransformersMUKESH KUMARNo ratings yet
- Computationally Efficient Stochastic Model Predictive Controller For Battery Thermal Management of Electric VehicleDocument13 pagesComputationally Efficient Stochastic Model Predictive Controller For Battery Thermal Management of Electric VehicleSriharsha SarmaNo ratings yet
- Understanding of HV Current Transformer Failures During Short-Time Current Tests - An Insight of Current Density Calculations Beyond IEC StandardsDocument6 pagesUnderstanding of HV Current Transformer Failures During Short-Time Current Tests - An Insight of Current Density Calculations Beyond IEC StandardsJONATHAN MORALESNo ratings yet
- Thermal Analysis of Overload Protection Relays Using Finite Element MethodDocument6 pagesThermal Analysis of Overload Protection Relays Using Finite Element MethodKiran KarthikNo ratings yet
- 2022 - Sbse - Voltage Variation in High Efficiency Motors - Final VersionDocument8 pages2022 - Sbse - Voltage Variation in High Efficiency Motors - Final VersionJonathan Muñoz TaboraNo ratings yet
- Motor ProtectionDocument34 pagesMotor Protectionmanirup_tceNo ratings yet
- SquareD Overload and Thermal SelectorDocument43 pagesSquareD Overload and Thermal SelectormtckrNo ratings yet
- Thermal Component Model For Electrothermal Analysis of IGBT Module SystemsDocument7 pagesThermal Component Model For Electrothermal Analysis of IGBT Module SystemsLeeSM JacobNo ratings yet
- Arduino Based Multifunctional Relay For Protection of Induction MotorDocument6 pagesArduino Based Multifunctional Relay For Protection of Induction MotordaNo ratings yet
- Overcurrent Protection in Electric Arc FurnacesDocument8 pagesOvercurrent Protection in Electric Arc FurnacesgigatrixNo ratings yet
- Reliability Analysis of Aircraft Starter Generator Drive ConverterDocument6 pagesReliability Analysis of Aircraft Starter Generator Drive Convertersezgin bayramNo ratings yet
- Advances in Motor Protection Relay FeaturesDocument10 pagesAdvances in Motor Protection Relay Featuresrudi tuaNo ratings yet
- UEP - PPT - Elec. Heating PDFDocument117 pagesUEP - PPT - Elec. Heating PDFANUSHA SINGH V HNo ratings yet
- IEEE 2009 Paper - Active Stator Winding Thermal ProtectionDocument9 pagesIEEE 2009 Paper - Active Stator Winding Thermal Protectionviren72No ratings yet
- DevasenaDocument65 pagesDevasenaSriram ramsNo ratings yet
- Molded Case Circuit BreakersDocument6 pagesMolded Case Circuit BreakersSatheesh Kumar NatarajanNo ratings yet
- Thermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuDocument3 pagesThermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuerpublicationNo ratings yet
- Thermal Study of A Superior Lithium Ion Polymer BatteryDocument6 pagesThermal Study of A Superior Lithium Ion Polymer BatteryScarlatache VladNo ratings yet
- Iet-Est 2020 0013Document9 pagesIet-Est 2020 0013dinhquangcdtbkNo ratings yet
- Investigation On PolarizationDocument6 pagesInvestigation On PolarizationDécio HanashiroNo ratings yet
- On-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsFrom EverandOn-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- Protection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsFrom EverandProtection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsNo ratings yet
- Day 1 Rest 60 Seconds Between Each Set (Longer If Required)Document7 pagesDay 1 Rest 60 Seconds Between Each Set (Longer If Required)Nebojsa MarkovicNo ratings yet
- DS Quantum Q 6800 NordsonASYMTEKDocument3 pagesDS Quantum Q 6800 NordsonASYMTEKDanijela KoNo ratings yet
- Lesson 32Document21 pagesLesson 32Byron CabatbatNo ratings yet
- Consumer Markets and Consumer Buyer BehaviorDocument33 pagesConsumer Markets and Consumer Buyer BehaviorAsfa AfzaalNo ratings yet
- Board Certified Behavior Analysts ' Supervisory Practices of Trainees: Survey Results and RecommendationsDocument11 pagesBoard Certified Behavior Analysts ' Supervisory Practices of Trainees: Survey Results and RecommendationsNBNo ratings yet
- Mhoaglin Rec LetterDocument1 pageMhoaglin Rec Letterapi-493849422No ratings yet
- Field Trip Report: Humanistic Studies-Introduction To World ReligionsDocument4 pagesField Trip Report: Humanistic Studies-Introduction To World ReligionsAlbertus SaputroNo ratings yet
- Measurement of Development of Cognitive and Attention Functions in ChildrenDocument7 pagesMeasurement of Development of Cognitive and Attention Functions in ChildrenAnton HrivnákNo ratings yet
- Language Testing: Liu JiandaDocument45 pagesLanguage Testing: Liu JiandaEra WahyuniNo ratings yet
- AER 316 Course OutlineDocument3 pagesAER 316 Course OutlineputhiawanNo ratings yet
- Alam AraDocument4 pagesAlam AraMihai Iulian PăunescuNo ratings yet
- Myers-Briggs Type Indicator (MBTI)Document15 pagesMyers-Briggs Type Indicator (MBTI)TattsunNo ratings yet
- A748084612 - 11265 - 6 - 2023 - Case Study Allotment K22MPDocument4 pagesA748084612 - 11265 - 6 - 2023 - Case Study Allotment K22MPPonnu jagadeshwar ReddyNo ratings yet
- Lesson Plan 4 (Science 9)Document2 pagesLesson Plan 4 (Science 9)Jeferson OrañoNo ratings yet
- Methodology of SkripsiDocument7 pagesMethodology of SkripsiDwiyantoroWisnu0% (1)
- Official Form CoverDocument8 pagesOfficial Form CoverMj GarciaNo ratings yet
- Action PlanDocument1 pageAction PlanAndrei Jose Gil (SM21Gil, Andrei Jose C.)No ratings yet
- Talent Management: DR Rajni SinghDocument30 pagesTalent Management: DR Rajni SinghGaurav TiwariNo ratings yet
- A Favor Da Punição ModeradaDocument23 pagesA Favor Da Punição ModeradaCika AngelNo ratings yet
- Lesson 2: Importance of Quantitative Research ACROSS FIELDS (Penslar & Porter, 2010)Document59 pagesLesson 2: Importance of Quantitative Research ACROSS FIELDS (Penslar & Porter, 2010)Patrice Del MundoNo ratings yet
- Women in Science WorksheetDocument2 pagesWomen in Science WorksheetJanna RickNo ratings yet
- Learning Plan SHS Oral ComDocument3 pagesLearning Plan SHS Oral ComRoxanne Marie BrazilNo ratings yet
- Prof Ed Reviewer With AnswerDocument203 pagesProf Ed Reviewer With AnswerEdel Borden PaclianNo ratings yet
- 5060 - Assignment 1 BriefDocument4 pages5060 - Assignment 1 BriefTrần Khánh HuyềnNo ratings yet
- Planificare Anuala Fairyland 4 2024Document7 pagesPlanificare Anuala Fairyland 4 2024Elena VieruNo ratings yet
- Mapeh (P.E) : Quarter 2.module NumberDocument3 pagesMapeh (P.E) : Quarter 2.module NumberJeannetteNo ratings yet
- PE Lab Manual - 21EEL55 - FinalDocument46 pagesPE Lab Manual - 21EEL55 - FinalAshwini0% (1)
- Virtual Orientation On The Guidelines On Preparation and Checking of School Forms For The S.YDocument43 pagesVirtual Orientation On The Guidelines On Preparation and Checking of School Forms For The S.YMercy Esguerra PanganibanNo ratings yet