You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Assignment 02Document6 pagesAssignment 02Javeria NaseemNo ratings yet
- PDF 13Document2 pagesPDF 13Ercan Umut DanışanNo ratings yet
- Tugas TRK LanjutDocument32 pagesTugas TRK LanjutJoses AdyatmaNo ratings yet
- 02 045 FDSDocument8 pages02 045 FDSJaveria NaseemNo ratings yet
- Fundatia Stalpului Central S1:: Ing F IngDocument8 pagesFundatia Stalpului Central S1:: Ing F IngIonasi IonNo ratings yet
- Inductor design and core selection for 1.2 kW converterDocument5 pagesInductor design and core selection for 1.2 kW converterMarcLinigerNo ratings yet
- AE1222-II Formula Sheet Aircraft Design Version 25-3-2021Document4 pagesAE1222-II Formula Sheet Aircraft Design Version 25-3-2021daniel dusNo ratings yet
- Hezam Alasqah CHE 354 HW 7Document11 pagesHezam Alasqah CHE 354 HW 7TimelessNo ratings yet
- Shell and Tube Heat Exchanger DesignDocument3 pagesShell and Tube Heat Exchanger DesignErwin FirmansyahNo ratings yet
- Perhitungan RelDocument30 pagesPerhitungan RelBig ANo ratings yet
- PROBLEM 3.120: SolutionDocument10 pagesPROBLEM 3.120: SolutionPedro Noe CMNo ratings yet
- XLS01 DISEÑO COLUMNAS CORTAS CONCRETO IE001 IE002 2019Q2 v1Document5 pagesXLS01 DISEÑO COLUMNAS CORTAS CONCRETO IE001 IE002 2019Q2 v1Arquinea Arquinea ArquineaNo ratings yet
- Optimization of ship design parameters using OpenMDAODocument12 pagesOptimization of ship design parameters using OpenMDAOAndrés ToalaNo ratings yet
- ME 363 Homework #1 Solution Control Chart and Gauge Capability AnalysisDocument4 pagesME 363 Homework #1 Solution Control Chart and Gauge Capability AnalysisNikos VaxevanidisNo ratings yet
- Maximum Glide Performance of AircraftDocument6 pagesMaximum Glide Performance of AircraftEmine YıldızNo ratings yet
- Johnson, Brian - ABET AssignmentDocument7 pagesJohnson, Brian - ABET AssignmentBrian JohnsonNo ratings yet
- Fick's Law Sample ProblemsDocument7 pagesFick's Law Sample ProblemsAj SedoNo ratings yet
- Aircraft Dynamics: Numerical Example and Directional StabilityDocument28 pagesAircraft Dynamics: Numerical Example and Directional StabilityAntony BalabanNo ratings yet
- Mathcad - Example 2 - 2 Finite Heat ReleaseDocument7 pagesMathcad - Example 2 - 2 Finite Heat ReleaseQuinn StraubNo ratings yet
- CONCLUSIONDocument16 pagesCONCLUSIONlado prakasaNo ratings yet
- Aerodynamics of Aicraft I: Technical University of Munich Chair of Aerodynamics and Fluid MechanicsDocument6 pagesAerodynamics of Aicraft I: Technical University of Munich Chair of Aerodynamics and Fluid MechanicskakaNo ratings yet
- Problema TSFDocument4 pagesProblema TSFJEYSON NILO HUARCAYA ARANDONo ratings yet
- Keiichi: Q3: Final Review 1. How Many Miles Did Peter Flights From Hilo (A) To Honolulu (C) ?Document4 pagesKeiichi: Q3: Final Review 1. How Many Miles Did Peter Flights From Hilo (A) To Honolulu (C) ?Bao HoangNo ratings yet
- Ecuaciones y Formulas para ParcialDocument2 pagesEcuaciones y Formulas para ParcialDanilo Herrera PinedaNo ratings yet
- Mijares, Dhane Kyle M 182-0067 Bsce-3A: Solve The Following ProblemsDocument5 pagesMijares, Dhane Kyle M 182-0067 Bsce-3A: Solve The Following ProblemsDhane Kyle MijaresNo ratings yet
- ឧហរណ៍សមតិកមរបស់មុខត់សសរDocument4 pagesឧហរណ៍សមតិកមរបស់មុខត់សសរOum ChhayNoyNo ratings yet
- PROBLEM 4.35: SolutionDocument10 pagesPROBLEM 4.35: SolutionGelvânio VieiraNo ratings yet
- P F' M F: Kip Psi Kip FT PsiDocument7 pagesP F' M F: Kip Psi Kip FT PsiCayse GcNo ratings yet
- Exercises Problem No. 3 V - BeltsDocument3 pagesExercises Problem No. 3 V - BeltsAriel GamboaNo ratings yet
- Mathcad - Zabatni Stup3Document10 pagesMathcad - Zabatni Stup3Martin BrnelićNo ratings yet
- Cong ThucDocument3 pagesCong Thucphucthinh221202No ratings yet
- Project Sameer HMTDocument9 pagesProject Sameer HMTHamza AliNo ratings yet
- Assignment 3Document4 pagesAssignment 3Sandeep ChallaNo ratings yet
- Amálisis de Viga - LRFD - Jhonatan M - Mateo PDocument2 pagesAmálisis de Viga - LRFD - Jhonatan M - Mateo POscar SanabriaNo ratings yet
- ACI 318 - Interaction Diagram P - M: Material PropertiesDocument25 pagesACI 318 - Interaction Diagram P - M: Material Propertiesr_zoro87No ratings yet
- Banco de Tubos 3 BolilloDocument2 pagesBanco de Tubos 3 BolilloThomasNo ratings yet
- LEC_10 Circuit 1Document67 pagesLEC_10 Circuit 1mariamamr28624No ratings yet
- 5.2 A 150-km, 230-kV, 60 HZ, Three-Phase Line Has A Positive-Sequence ImpedanceDocument3 pages5.2 A 150-km, 230-kV, 60 HZ, Three-Phase Line Has A Positive-Sequence ImpedanceBony DiazgNo ratings yet
- Beton No 1Document5 pagesBeton No 1Filter INDNo ratings yet
- Example Thin Airfoil TheoryDocument6 pagesExample Thin Airfoil TheoryDaniela Alejandra OsorioNo ratings yet
- Given: DV/DT 1000 V/ S and I: Chapter 9 - ThyristorsDocument8 pagesGiven: DV/DT 1000 V/ S and I: Chapter 9 - ThyristorsAbd Alkader AlwerNo ratings yet
- Formulario Termodinamica-2Document1 pageFormulario Termodinamica-2Anonymous 2x6VE65kNo ratings yet
- Mathcad - 4stalp13-17Document3 pagesMathcad - 4stalp13-17cypydymy100% (1)
- Process Modelling, Simulation and Control For Chemical Engineers. Solved Problems. Chapter 10 Laplace Domain Analysis of Conventional Feedback Control SystemsDocument34 pagesProcess Modelling, Simulation and Control For Chemical Engineers. Solved Problems. Chapter 10 Laplace Domain Analysis of Conventional Feedback Control SystemsViajante_santosNo ratings yet
- Col Design Spreadsheet5Document185 pagesCol Design Spreadsheet5Vincelord CabadduNo ratings yet
- Design of Distillation ColumnDocument21 pagesDesign of Distillation Columnusmanafzal246100% (1)
- 7-3 Example 7-2Document5 pages7-3 Example 7-2Oum ChhayNoyNo ratings yet
- Summary Chapter45Document3 pagesSummary Chapter45blalllNo ratings yet
- Hydraulics 2 (CIVL 0018) - Spring-20-Assignment Module Code: CIVL 0018 Module Name: Hydraulics2 Submitter byDocument15 pagesHydraulics 2 (CIVL 0018) - Spring-20-Assignment Module Code: CIVL 0018 Module Name: Hydraulics2 Submitter byRizwan ullahNo ratings yet
- Cavitation NotesDocument4 pagesCavitation NotesFIRDAUS BIN MAHAMADNo ratings yet
- Deflection calculator beam analysisDocument5 pagesDeflection calculator beam analysisbrayanNo ratings yet
- PROBLEM 4.19: SolutionDocument10 pagesPROBLEM 4.19: SolutionGelvânio VieiraNo ratings yet
- RLC_AssignmentDocument5 pagesRLC_AssignmentSunny RaoNo ratings yet
- Stern Tube NewDocument1,154 pagesStern Tube NewMuchammatAlvinurNo ratings yet
- CES 4702 Concrete Slab Design HWDocument7 pagesCES 4702 Concrete Slab Design HWLuis AlvarezNo ratings yet
- Ejemplo Peraltes IngDocument2 pagesEjemplo Peraltes IngFREDDY AGUILANo ratings yet
- ϕM ϕM ϕM ϕP ϕP ϕP ϕP: nA nB nC n nA nB nCDocument3 pagesϕM ϕM ϕM ϕP ϕP ϕP ϕP: nA nB nC n nA nB nCshaider_350986No ratings yet
- Aircraft Performance TulapurkaraDocument6 pagesAircraft Performance TulapurkaraKISHORKUMAR UKIRDENo ratings yet
- Engineering EconomicsDocument11 pagesEngineering EconomicsCarl Eugene de LemosNo ratings yet
- Sensor Giro Compas UavDocument11 pagesSensor Giro Compas UavVany Braun100% (1)
- The Road So Far - Aircraft Flight Mechanics by Harry Smith, PHDDocument2 pagesThe Road So Far - Aircraft Flight Mechanics by Harry Smith, PHDhung dangNo ratings yet
- EoMs For Rotation - ( - Def - Dif ( - Text (D) ) - ) - Aircraft Flight Mechanics by Harry Smith, PHDDocument5 pagesEoMs For Rotation - ( - Def - Dif ( - Text (D) ) - ) - Aircraft Flight Mechanics by Harry Smith, PHDhung dangNo ratings yet
- Introduction - Aircraft Flight Mechanics by Harry Smith, PHDDocument6 pagesIntroduction - Aircraft Flight Mechanics by Harry Smith, PHDhung dangNo ratings yet
- F-16 Wing Structure LifecycleDocument4 pagesF-16 Wing Structure LifecyclenileshraneNo ratings yet
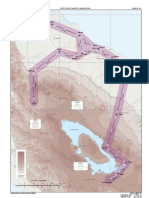
- Navigate Sumatra's AirwaysDocument2 pagesNavigate Sumatra's Airwaysarif faridhoNo ratings yet
- Emp PDFDocument2 pagesEmp PDFkhajarasool786No ratings yet
- MVAC Duct Pressure Drop (Reference Summary)Document19 pagesMVAC Duct Pressure Drop (Reference Summary)Cheng Chun TingNo ratings yet
- P8罗盘Document4 pagesP8罗盘xiaopeng1No ratings yet
- Aircraft Maintenance and Repair 6th EditDocument651 pagesAircraft Maintenance and Repair 6th Editprada hahaNo ratings yet
- Advertisement For Group A Combatised in BSF Air WingDocument23 pagesAdvertisement For Group A Combatised in BSF Air Wingarjun SinghNo ratings yet
- Citation II SP/2 C551 Operating Manual GuideDocument27 pagesCitation II SP/2 C551 Operating Manual GuideMaxi 76No ratings yet
- LTBJDocument30 pagesLTBJCihat NuroğluNo ratings yet
- Mass BalanceDocument114 pagesMass BalanceAyaan KhanNo ratings yet
- Naca-Tr-711 - Analysis and Prediction of Longitudinal Stability of AirplanesDocument9 pagesNaca-Tr-711 - Analysis and Prediction of Longitudinal Stability of AirplanesАндрей ПятыгинNo ratings yet
- Future of NCF Airshow at Risk - 7 MAR 2024Document1 pageFuture of NCF Airshow at Risk - 7 MAR 2024Brandon ChewNo ratings yet
- AEROPRAKT-22LS Pilot Operating Handbook A22LS-XXX-POH-01Document30 pagesAEROPRAKT-22LS Pilot Operating Handbook A22LS-XXX-POH-01valiko nadibaidzeNo ratings yet
- Radial Thrust Calculator: Radial Thrust (PSI) : F K X (H X s/2.31) X D XBDocument2 pagesRadial Thrust Calculator: Radial Thrust (PSI) : F K X (H X s/2.31) X D XBRahul ChandrawarNo ratings yet
- AAE 251 Formulas: Standard AtmosphereDocument6 pagesAAE 251 Formulas: Standard Atmospherepilotf15No ratings yet
- Model Airplane News January 2023 PDFDocument70 pagesModel Airplane News January 2023 PDFEduardo YerisNo ratings yet
- DGCA GAS TURBINE ENGINEDocument4 pagesDGCA GAS TURBINE ENGINEjontis jasoliyaNo ratings yet
- Ad 93-14-12Document1 pageAd 93-14-12Mohamad Hazwan Mohamad JanaiNo ratings yet
- IJSET V9 Issue5 471Document5 pagesIJSET V9 Issue5 471Israe El AmriNo ratings yet
- Citycraft: BOEING 737-8V3Document9 pagesCitycraft: BOEING 737-8V3felipeNo ratings yet
- 189 Esdras Etal AERO2015Document11 pages189 Esdras Etal AERO2015bedawy2010No ratings yet
- Three-Dimensional Cavity Flow Fields at Subsonic and Transonic SpeedsDocument83 pagesThree-Dimensional Cavity Flow Fields at Subsonic and Transonic SpeedsMonitering EyeNo ratings yet
- Sonex Pilot's OperatingDocument35 pagesSonex Pilot's Operatingemerson magnoNo ratings yet
- The ideal regional commuter: ATR 42-600Document2 pagesThe ideal regional commuter: ATR 42-600Miroslav SpišákNo ratings yet
- Application Charts 6 2018Document7 pagesApplication Charts 6 2018EleazarNo ratings yet
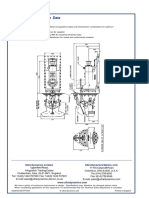
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- 4.8 Runway and Taxiway Marking Runways: Rohini College of Engineering & TechnologyDocument7 pages4.8 Runway and Taxiway Marking Runways: Rohini College of Engineering & TechnologyPrashant ShahNo ratings yet
- Drone Training Syllabus for Remote PilotsDocument28 pagesDrone Training Syllabus for Remote PilotsVenkata NS DhulipalaNo ratings yet
- Airplane CrashDocument1 pageAirplane CrashSukrit Sharma 17210109No ratings yet
- Polybatic Edge 540 Part1Document9 pagesPolybatic Edge 540 Part1dorimondNo ratings yet