You might also like
- ĐSTT bài tậpDocument7 pagesĐSTT bài tậpHoang Mai Dung K17 HLNo ratings yet
- Practica - de - Matrices - y - Determinantes Solucion DefinitivoDocument9 pagesPractica - de - Matrices - y - Determinantes Solucion DefinitivoCopycentro 2No ratings yet
- MAE101 Ass2Document5 pagesMAE101 Ass2Hoang Mai Dung K17 HLNo ratings yet
- Algebra Ii Project Work - 102949Document21 pagesAlgebra Ii Project Work - 102949Bram PrinceNo ratings yet
- ECON1101Document4 pagesECON1101Helen ToNo ratings yet
- Aplicar El Método Gauss-Siedel para Obtener La Solución de Los Siguientes SistemasDocument8 pagesAplicar El Método Gauss-Siedel para Obtener La Solución de Los Siguientes SistemasAyrton IdrogoNo ratings yet
- Assignment 2Document7 pagesAssignment 2sanaullah sanyNo ratings yet
- Portofolio Statistik MultivariatDocument91 pagesPortofolio Statistik MultivariatShintya WedaniNo ratings yet
- Ejercicio 4 Jorge ReyDocument11 pagesEjercicio 4 Jorge ReyJorge Enrique Rey MaldonadoNo ratings yet
- Ejercicio 4A Tarea 1 Algebra LinealDocument5 pagesEjercicio 4A Tarea 1 Algebra LinealHenry BritoNo ratings yet
- Aljabar Linear Aa1Document4 pagesAljabar Linear Aa1jokobedjo0No ratings yet
- Ass 1Document4 pagesAss 1Debiprasad GhoshNo ratings yet
- Self-Exercises 7Document1 pageSelf-Exercises 7visahNo ratings yet
- Cubic Spline Questions: SolutionDocument11 pagesCubic Spline Questions: SolutionJUNIOR CCAIHUARI HOYOSNo ratings yet
- Algebra 1 A 4Document23 pagesAlgebra 1 A 4bryanNo ratings yet
- Ce 222 Rotatorial JairusDocument32 pagesCe 222 Rotatorial JairusJulius CodiamatNo ratings yet
- Algebra Lineal Grupo C Deber 3Document14 pagesAlgebra Lineal Grupo C Deber 3Mauro OrtegaNo ratings yet
- Ejercicios 6 A 10Document3 pagesEjercicios 6 A 10Carlos DavidNo ratings yet
- E20214 Math Econ 03 Matrix and Cramer's RuleDocument3 pagesE20214 Math Econ 03 Matrix and Cramer's RuleJohn ChanNo ratings yet
- Activity 1 Edmath 300Document3 pagesActivity 1 Edmath 300Nestthe CasidsidNo ratings yet
- Nama: Muhammad Rafi Rafsanzani. NPM: 201051003. Jurusan: Sistem InformasiDocument6 pagesNama: Muhammad Rafi Rafsanzani. NPM: 201051003. Jurusan: Sistem InformasiRafi RafsanzaniNo ratings yet
- Coba Ini-DigabungkanDocument8 pagesCoba Ini-DigabungkanEvelyn Selina Belva Sable SihonoNo ratings yet
- Self-Exercises 6Document1 pageSelf-Exercises 6visahNo ratings yet
- La 1oct12 55Document4 pagesLa 1oct12 55sNo ratings yet
- Tarea de GaussDocument2 pagesTarea de GaussJesús Alberto Salas EspinoNo ratings yet
- Chapter (4) - Ahmed SamyDocument10 pagesChapter (4) - Ahmed SamyMostafa KaghaNo ratings yet
- Tarea 5 AlgebraDocument6 pagesTarea 5 AlgebraEstefania Rodriguez SanchezNo ratings yet
- Guia 1 AlgebraDocument3 pagesGuia 1 AlgebraCarlos Edward Garces ArriagadaNo ratings yet
- Tugas Kelompok Ke-1 (Minggu 3 / Sesi 4) : Tidak SamaDocument10 pagesTugas Kelompok Ke-1 (Minggu 3 / Sesi 4) : Tidak Samajuliuz90No ratings yet
- MatrixDocument16 pagesMatrixEbenzy YoungNo ratings yet
- Práctica N° 1Document3 pagesPráctica N° 1rodrigo suarez arroyoNo ratings yet
- MAT1503 October November Memorandum 2017Document10 pagesMAT1503 October November Memorandum 2017Ncobile MkwanaziNo ratings yet
- Linear Algebra QuizDocument5 pagesLinear Algebra QuizJerry RosaotNo ratings yet
- Assignment 2 of ECON1101Document4 pagesAssignment 2 of ECON1101Helen ToNo ratings yet
- 2 Contoh Matrix Anti Simetri Berorde 3Document2 pages2 Contoh Matrix Anti Simetri Berorde 3Puput Aprilia Eka SariNo ratings yet
- Algebra LinealDocument4 pagesAlgebra LinealJheison DiazNo ratings yet
- Activities/Assessment: Week 2: Operations On MatricesDocument3 pagesActivities/Assessment: Week 2: Operations On MatricesMark Kenneth DiaNo ratings yet
- Tarea 1Document6 pagesTarea 1jc gameNo ratings yet
- Factors of Polynomials What'S MoreDocument4 pagesFactors of Polynomials What'S MoreQuirico HechanovaNo ratings yet
- Taller 1 Algebra Lineal Viveros Morales Jesus EduardoDocument23 pagesTaller 1 Algebra Lineal Viveros Morales Jesus Eduardojesus viverosNo ratings yet
- Kunci Jawaban Ulangan MatriksDocument6 pagesKunci Jawaban Ulangan MatriksHero Handy DinataNo ratings yet
- Guía de Ejercicios Unidad 4: 1) Realice Las Siguientes PotenciasDocument4 pagesGuía de Ejercicios Unidad 4: 1) Realice Las Siguientes PotenciasFranco JofreNo ratings yet
- Matematika Ekonomi Dan BisnisDocument7 pagesMatematika Ekonomi Dan Bisnisyuliandry AndestaNo ratings yet
- Tutorial Chapter 6Document1 pageTutorial Chapter 6Ee Hong BinNo ratings yet
- Escuela Superior Politecnica de Chimborazo Facultad de MecanicaDocument25 pagesEscuela Superior Politecnica de Chimborazo Facultad de MecanicaGlenda CacuangoNo ratings yet
- O-Levels Mathematics 2006 AnswersDocument13 pagesO-Levels Mathematics 2006 AnswersKuziva MbeuNo ratings yet
- Sesión de Cálculo Multivariado - 02 - 05 - 2020Document4 pagesSesión de Cálculo Multivariado - 02 - 05 - 2020FerrnnandOo RmzNo ratings yet
- 1 Repaso 3er AñoDocument3 pages1 Repaso 3er AñoRomina ArtachoNo ratings yet
- Activities Chapter 1 and 2Document12 pagesActivities Chapter 1 and 2JUMARLEN BARRERANo ratings yet
- Assignment 7Document4 pagesAssignment 7doduckien100hpNo ratings yet
- Pak 3Document5 pagesPak 3Zahid ButtNo ratings yet
- Practico DeterminantesDocument4 pagesPractico DeterminantesMagali Llanos CayoNo ratings yet
- Practico DeterminantesDocument4 pagesPractico DeterminantesMagali Llanos CayoNo ratings yet
- Elimination ExamplesDocument14 pagesElimination ExamplesJOHN LOUIE FLORESNo ratings yet
- Harshit Singh Practical2Document12 pagesHarshit Singh Practical2Harshit SinghNo ratings yet
- A B Ba A B B A: Question 3: Compute The Indicated ProductsDocument2 pagesA B Ba A B B A: Question 3: Compute The Indicated ProductsDepanjan ChowdhuryNo ratings yet
- Taller 2 AlgebraDocument4 pagesTaller 2 AlgebraVANXBEASTNo ratings yet
- Tugas MTKDocument5 pagesTugas MTKAulia Tavian RauhanNo ratings yet
- Zadaci Za Vježbu - MatriceDocument2 pagesZadaci Za Vježbu - MatriceMarijan MartinovićNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- GT Designer 3 Screen Design ManualDocument3,238 pagesGT Designer 3 Screen Design ManualRobertoNo ratings yet
- Practice Test English 3aDocument4 pagesPractice Test English 3athuongffca24No ratings yet
- UNIT 10 (Workbook)Document6 pagesUNIT 10 (Workbook)thuongffca24No ratings yet
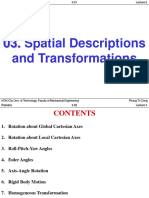
- Lecture - 3 - Spatial - Description - TransformationDocument77 pagesLecture - 3 - Spatial - Description - TransformationLONG NGUYỄN HOÀNGNo ratings yet
- SH (NA) - 080861ENG-AF - GT Simulator3 Version1 Operating Manual For GT Works3Document178 pagesSH (NA) - 080861ENG-AF - GT Simulator3 Version1 Operating Manual For GT Works3thuongffca24No ratings yet
- Key InstallDocument1 pageKey Installthuongffca24No ratings yet
- (2018) A Survey of Physics-Based Attack Detection in Cyber-Physical SystemsDocument36 pages(2018) A Survey of Physics-Based Attack Detection in Cyber-Physical SystemsPartha BiswasNo ratings yet
- 3.4 Linearization of Nonlinear State Space Models: 1 F X Op 1 F X Op 2 F U Op 1 F U Op 2Document3 pages3.4 Linearization of Nonlinear State Space Models: 1 F X Op 1 F X Op 2 F U Op 1 F U Op 2Ilija TomicNo ratings yet
- Pid 5749963Document6 pagesPid 5749963Ali ArzaniNo ratings yet
- Model Question Paper (CBCS) With Effect From 2015-16: 15ME73 USNDocument2 pagesModel Question Paper (CBCS) With Effect From 2015-16: 15ME73 USNchandrashekar mNo ratings yet
- Process Control and InstrumentationDocument22 pagesProcess Control and InstrumentationJyoti Swaroop50% (2)
- ELE 3212 - SS LabDocument49 pagesELE 3212 - SS LabsheetalprachandraNo ratings yet
- Advances in PID ControlDocument286 pagesAdvances in PID ControlDavid GonzalezNo ratings yet
- c108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueDocument6 pagesc108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueMuhammad Ahsan AyubNo ratings yet
- S1.State Variable RepresentationDocument5 pagesS1.State Variable RepresentationrajeshmholmukheNo ratings yet
- Week - 7 - Analysis - of - State - Space - SystemsDocument32 pagesWeek - 7 - Analysis - of - State - Space - SystemsMetin DurmuşNo ratings yet
- EE3302Document2 pagesEE3302ashishNo ratings yet
- 3 DacDocument7 pages3 DacAde safitraNo ratings yet
- L2-2 OdesDocument16 pagesL2-2 OdesDaniel LoboNo ratings yet
- Study of Model Predictive Control Using Ni LabviewDocument10 pagesStudy of Model Predictive Control Using Ni LabviewBrankko Jhonathan Torres SaavedraNo ratings yet
- Control Systems - Controllability and ObservabilityDocument5 pagesControl Systems - Controllability and ObservabilityCorey YoungNo ratings yet
- 380 Power Systems Electromagnetic Transients SimulationDocument14 pages380 Power Systems Electromagnetic Transients SimulationkjfenNo ratings yet
- Reliability Evaluation in Transmission SystemsDocument18 pagesReliability Evaluation in Transmission SystemsHUALI TOCAS DEYVIDNo ratings yet
- Problems Problem Space Search Defining The Problem As State Space SearchDocument16 pagesProblems Problem Space Search Defining The Problem As State Space SearchJAYANTA GHOSHNo ratings yet
- Ee4302 Ca1Document51 pagesEe4302 Ca1Norul Ashikin NorzainNo ratings yet
- Structural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Document156 pagesStructural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Alberto LorenzonNo ratings yet
- EI - 301 Control Systems End-Sem Question Paper Nov' 2013Document1 pageEI - 301 Control Systems End-Sem Question Paper Nov' 2013lalusebanNo ratings yet
- The Use of Gaussian Processes in System IdentificationDocument13 pagesThe Use of Gaussian Processes in System IdentificationaaNo ratings yet
- Control Systems: Lab Instructor: Hussain Asif Lab: 01Document9 pagesControl Systems: Lab Instructor: Hussain Asif Lab: 01Usairum MirzaNo ratings yet
- EE1354 MODERN CONTROL SYSTEMS - FinalDocument23 pagesEE1354 MODERN CONTROL SYSTEMS - FinalMebreNo ratings yet
- M - Tech - ECE - Scheme & Syllabus (2016 New)Document32 pagesM - Tech - ECE - Scheme & Syllabus (2016 New)Er SarbeshNo ratings yet
- Ee 630 Lab ManualDocument18 pagesEe 630 Lab Manualsmashraf2No ratings yet
- ControllabilityDocument13 pagesControllabilityEswaramoorthyNo ratings yet
- Digital Control in Power ElectronicsDocument159 pagesDigital Control in Power Electronicsthietdaucong100% (2)
- Introducción PDFDocument14 pagesIntroducción PDFsalimNo ratings yet
- Non-Linear Moving Target Tracking: A Particle Filter ApproachDocument7 pagesNon-Linear Moving Target Tracking: A Particle Filter ApproachInternational Journal of Computer and Communication System EngineeringNo ratings yet