You might also like
- Section 5 Block DiagramsDocument41 pagesSection 5 Block Diagramsmishal shakeelNo ratings yet
- Block Diagram ManipulationDocument21 pagesBlock Diagram Manipulationsayaf khanNo ratings yet
- Section 2 Block Diagrams & Signal Flow GraphsDocument62 pagesSection 2 Block Diagrams & Signal Flow GraphsAnushaChittiNo ratings yet
- AAE3004 Lecture 6 - Presentation On 11 Oct 2022Document34 pagesAAE3004 Lecture 6 - Presentation On 11 Oct 2022Myname SmaNo ratings yet
- Lesson 6Document19 pagesLesson 6Octav PaloaieNo ratings yet
- T8 - Root Locus Technique - 2021Document51 pagesT8 - Root Locus Technique - 2021James ChanNo ratings yet
- 1-Module 1-Introduction About Ems and ScadaDocument15 pages1-Module 1-Introduction About Ems and Scadasahale sheraNo ratings yet
- Control Systems Lab #3: Stability AnalysisDocument5 pagesControl Systems Lab #3: Stability Analysisahmed shahNo ratings yet
- Section 5 Power Flow PDFDocument128 pagesSection 5 Power Flow PDFRanjan GandhiNo ratings yet
- Lecture 6Document7 pagesLecture 6Milind BhatiaNo ratings yet
- HE Lecture 16Document11 pagesHE Lecture 16presidentisc nit-rourkelaNo ratings yet
- L 03 - Ece 4217Document26 pagesL 03 - Ece 4217কবুতর বাড়ি Pigeon HomeNo ratings yet
- Fluid Mechanics Potential Flow PDFDocument13 pagesFluid Mechanics Potential Flow PDFRaihan LutfiantoNo ratings yet
- Steady State Plug Flow Reactor: Hernandez PineDocument17 pagesSteady State Plug Flow Reactor: Hernandez PineJez Jaycris HernandezNo ratings yet
- Newton Raphson Load Flow MethodDocument15 pagesNewton Raphson Load Flow MethodAparna JoseNo ratings yet
- Module 5 - BJT BiasingDocument13 pagesModule 5 - BJT BiasingKenNo ratings yet
- Load FlowDocument41 pagesLoad FlowSmida ChahinezNo ratings yet
- Ilovepdf - Merged (5) - 1-103Document103 pagesIlovepdf - Merged (5) - 1-103Mael MoñarchNo ratings yet
- How To Draw Block DiagramDocument6 pagesHow To Draw Block DiagramAbdulrahmanNo ratings yet
- EE 218 - Lecture 3 Generation Shift Factors-2018-06Document23 pagesEE 218 - Lecture 3 Generation Shift Factors-2018-06riley09002No ratings yet
- Chapter 4 Laplace TransformDocument59 pagesChapter 4 Laplace TransformAsge AscheNo ratings yet
- Belt DrivesDocument66 pagesBelt DrivesKeshav sainiNo ratings yet
- AC6 Module14Document12 pagesAC6 Module14Fred BorjaNo ratings yet
- Block and Signal-Flow Diagrams ( ( ( (4) ) ) )Document11 pagesBlock and Signal-Flow Diagrams ( ( ( (4) ) ) )عبدالرحمن عطاريNo ratings yet
- Power System Analysis (Uee509)Document17 pagesPower System Analysis (Uee509)KANWALPREET SINGH TIWANANo ratings yet
- Block Diagrams & Signal Flow GraphsDocument47 pagesBlock Diagrams & Signal Flow GraphsMacky Pogi02No ratings yet
- Lecture 2Document7 pagesLecture 2Abdalla NasserNo ratings yet
- Fundametals of Fluid FlowsDocument23 pagesFundametals of Fluid FlowsJade DigNo ratings yet
- 1-Slope Deflection MethodDocument25 pages1-Slope Deflection MethodyousifNo ratings yet
- 06 NewtonEulerDynamicsDocument18 pages06 NewtonEulerDynamicsNebiyu TenayeNo ratings yet
- Lesson 4Document14 pagesLesson 4Octav PaloaieNo ratings yet
- 12-Zeros and Poles-2Document18 pages12-Zeros and Poles-2Ahmad Al-ShormanNo ratings yet
- 25.04.2022-501&502 Plane Kinematics of Rigid BodiesDocument23 pages25.04.2022-501&502 Plane Kinematics of Rigid BodiesCheccu PjanicNo ratings yet
- Chapter 5 Z TransformDocument33 pagesChapter 5 Z TransformAsge AscheNo ratings yet
- Chapter 8 POWER FLOW THROUGHT INTERCONNECTORSDocument19 pagesChapter 8 POWER FLOW THROUGHT INTERCONNECTORSSampi LuminaNo ratings yet
- EE330 Digital Signal Processing: Discrete Time Signals and SystemsDocument17 pagesEE330 Digital Signal Processing: Discrete Time Signals and SystemsNihal AhmadNo ratings yet
- All Pass Filter - Analog Lab ReportDocument14 pagesAll Pass Filter - Analog Lab Reportgautamsivakumar100No ratings yet
- Chapter ThreeDocument44 pagesChapter Threeasresahegnmeklit13No ratings yet
- Z TransformDocument37 pagesZ Transformعلي كامل الاسديNo ratings yet
- Lecture 08 Forced Vibration Single Degree of Freedom Model Practical ApplicationDocument11 pagesLecture 08 Forced Vibration Single Degree of Freedom Model Practical ApplicationBijay Kumar MohapatraNo ratings yet
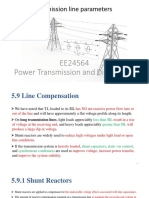
- 5.2.0 (5.9) Line Model and PerformanceDocument23 pages5.2.0 (5.9) Line Model and PerformanceOMAR METRINo ratings yet
- Control SystemsDocument58 pagesControl Systemsadityasingh273158No ratings yet
- Chapter11 VirtualWorkDocument10 pagesChapter11 VirtualWorkolyver.cavanNo ratings yet
- Chapter 1 - Network Function - Part 2Document17 pagesChapter 1 - Network Function - Part 2Yara KafaNo ratings yet
- EE2401 - Power System Operation and Control Unit II Real Power-Frequency ControlDocument27 pagesEE2401 - Power System Operation and Control Unit II Real Power-Frequency ControlSilas Stephen100% (1)
- 02 - Chapter 10 Sinusoidal Steady State AnalysisDocument15 pages02 - Chapter 10 Sinusoidal Steady State AnalysisUmar BazafNo ratings yet
- Lecture14 Sinusoidal FunctionsDocument15 pagesLecture14 Sinusoidal FunctionsBashan Kur BuhroyNo ratings yet
- Lecture 9Document7 pagesLecture 9Milind BhatiaNo ratings yet
- F3 Ch-8 Root LocusDocument25 pagesF3 Ch-8 Root Locusafride.binsaifNo ratings yet
- RE Notes 5Document14 pagesRE Notes 5ahmedNo ratings yet
- Week 5 Ecentrical LoadingDocument6 pagesWeek 5 Ecentrical LoadingFrancis Philippe Cruzana CariñoNo ratings yet
- PMS Theory Chapter2Document42 pagesPMS Theory Chapter2moulitechNo ratings yet
- LectureDocument40 pagesLectureUmair Ejaz ButtNo ratings yet
- Lecture 5 - 6Document24 pagesLecture 5 - 6Hisham ElReedyNo ratings yet
- Potential: - Line IntegralsDocument55 pagesPotential: - Line IntegralsHasanNo ratings yet
- KF Extension To Nonlinear Systems: M. Sami Fadali Professor EE University of NevadaDocument42 pagesKF Extension To Nonlinear Systems: M. Sami Fadali Professor EE University of NevadaAshutosh AshuNo ratings yet
- Math 123 Ex 1 Q8Document2 pagesMath 123 Ex 1 Q8Trevor ChilmanNo ratings yet
- W4 PotentialDocument10 pagesW4 PotentialAshraf YusofNo ratings yet
- Module 4 Electric Potential and Electric Potential Energy PDFDocument35 pagesModule 4 Electric Potential and Electric Potential Energy PDFLesley WNo ratings yet
- Course Outline MMSC Monte Carlo MethodsDocument4 pagesCourse Outline MMSC Monte Carlo MethodsLatosha TrevinoNo ratings yet
- Bell Nonlocality Valerio Scarani Full ChapterDocument67 pagesBell Nonlocality Valerio Scarani Full Chaptermark.dame383100% (8)
- ConsistencyDocument3 pagesConsistencyNicolas LapautreNo ratings yet
- Solutions To 2.13, 2.23, 2.55 Exercises of Quantum Computation and Quantum Information Nielsen 10th EditionDocument5 pagesSolutions To 2.13, 2.23, 2.55 Exercises of Quantum Computation and Quantum Information Nielsen 10th EditionADRIAN FELIPE HERNANDEZ BORDANo ratings yet
- Gaussian Elimination: Example 1: Solve This SystemDocument41 pagesGaussian Elimination: Example 1: Solve This SystemNyajena MurozviNo ratings yet
- Extremum-Seeking-Based Adaptive Model-Free Control and Its Application To Automated Vehicle Path Tracking PDFDocument11 pagesExtremum-Seeking-Based Adaptive Model-Free Control and Its Application To Automated Vehicle Path Tracking PDFvivian yulie Quintero BarreraNo ratings yet
- Solving Polynomial Equations: Lesson 3Document36 pagesSolving Polynomial Equations: Lesson 3Selene NyxNo ratings yet
- TitanicDocument4 pagesTitanicRohini BhosaleNo ratings yet
- Dsa MCQDocument9 pagesDsa MCQbenaminsan100% (1)
- 2023 Oct CSC649 Group Project - Evaluation FormDocument1 page2023 Oct CSC649 Group Project - Evaluation FormMUHAMMAD AMER FAIZ BIN ABDUL RAHMANNo ratings yet
- Lecture No.6Document8 pagesLecture No.6MUHAMMAD USMANNo ratings yet
- Information Science & Engineering / / BEC Bagalkot, (Karnataka) INDIA.Document3 pagesInformation Science & Engineering / / BEC Bagalkot, (Karnataka) INDIA.SharanangadiNo ratings yet
- Textbook Predictive Modeling Applications in Actuarial Science Volume 2 Case Studies in Insurance 1St Edition Edward W Frees Ebook All Chapter PDFDocument64 pagesTextbook Predictive Modeling Applications in Actuarial Science Volume 2 Case Studies in Insurance 1St Edition Edward W Frees Ebook All Chapter PDFthomas.navarro552100% (2)
- Jawaban HuaweiDocument58 pagesJawaban HuaweiKresna TriwibowoNo ratings yet
- Digital Signal Processing Lab Work (TEC-317) : NAME: Samyak I.D.: 53589Document24 pagesDigital Signal Processing Lab Work (TEC-317) : NAME: Samyak I.D.: 53589Coolest SamyakNo ratings yet
- Iris Classification: It Workshop Report (BTCS 305-18)Document13 pagesIris Classification: It Workshop Report (BTCS 305-18)shivamNo ratings yet
- Flow Line Balancing Problem & Extensions/ EnhancementsDocument27 pagesFlow Line Balancing Problem & Extensions/ EnhancementsVikasNo ratings yet
- Simpson S RulesDocument9 pagesSimpson S RulesMD. WALID AHMAD MAFUJNo ratings yet
- 1 - Frequency CountDocument30 pages1 - Frequency CountJelvin Base50% (2)
- Crypt MulDocument19 pagesCrypt MulmcaviimsNo ratings yet
- NP CompleteDocument10 pagesNP Complete李葵慶No ratings yet
- Operation Management SyllabusDocument2 pagesOperation Management SyllabusPiyush Singh RajputNo ratings yet
- Adding and Subtracting PolynomialsDocument8 pagesAdding and Subtracting PolynomialsHyung BaeNo ratings yet
- Module 2 NotesDocument24 pagesModule 2 NotesKeshav MishraNo ratings yet
- Z Eigen Value Calculation in AnsysDocument17 pagesZ Eigen Value Calculation in AnsysPramod Rakt PatelNo ratings yet
- A Robust First-Arrival Picking Workflow Using Convolutional and Recurrent Neural NetworksDocument44 pagesA Robust First-Arrival Picking Workflow Using Convolutional and Recurrent Neural NetworksXuqing WuNo ratings yet
- DWDM Unit5Document14 pagesDWDM Unit5sri charanNo ratings yet
- Aamm Assignment 1Document4 pagesAamm Assignment 1nanditha sivanNo ratings yet
- Nis MicroprojectDocument21 pagesNis MicroprojectNitesh Gowardhan BorlaNo ratings yet
- 2-Algebra (Dividing Polynomials) 2022Document26 pages2-Algebra (Dividing Polynomials) 2022Sri Devi NagarjunaNo ratings yet