You might also like
- 1 - Inputs: Project Name: Title of Report: 180xx R0yy Input Variable Name Units Symbol Value Formula & InformationDocument17 pages1 - Inputs: Project Name: Title of Report: 180xx R0yy Input Variable Name Units Symbol Value Formula & InformationSurya PratapNo ratings yet
- Examples On Design of Flexural Members: M KN X X MDocument9 pagesExamples On Design of Flexural Members: M KN X X MTesfa HunderaNo ratings yet
- Steel Member DesignDocument41 pagesSteel Member DesignYanfei Jin100% (1)
- Steam Calculators - Steam Turbine CalculatorDocument2 pagesSteam Calculators - Steam Turbine Calculatormontymilky100% (2)
- APCR Unit 5 MCQ and FRQ 1 1 PDFDocument21 pagesAPCR Unit 5 MCQ and FRQ 1 1 PDFyacimerabetNo ratings yet
- Eng. Khalid Column-DesignDocument47 pagesEng. Khalid Column-Designjunaid112No ratings yet
- Entropy ChangeDocument13 pagesEntropy Changeنبيل محمد عيد ابوميراNo ratings yet
- Precast Prestressed Concrete Girder Bridge - Design ExampleDocument37 pagesPrecast Prestressed Concrete Girder Bridge - Design Examplerammiris100% (1)
- Purlin & Sagrod Design (NSCP 2015)Document4 pagesPurlin & Sagrod Design (NSCP 2015)Jake Cortez67% (3)
- Iplv NPLVDocument5 pagesIplv NPLVKamal HaziqNo ratings yet
- Longitudinal BearingDocument6 pagesLongitudinal BearingDPJAIN INFRASTRUCTURENo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Design of Pot Ptfe Bearing (Free Bearing) As Per Irc 83:2002 (Part 3)Document7 pagesDesign of Pot Ptfe Bearing (Free Bearing) As Per Irc 83:2002 (Part 3)DPJAIN INFRASTRUCTURENo ratings yet
- Column DesignDocument2 pagesColumn DesignAdNo ratings yet
- Solutions For Sample Questions Used in LecturesDocument45 pagesSolutions For Sample Questions Used in LecturesAli Hussain100% (1)
- Word Version - Thermo 2Document209 pagesWord Version - Thermo 2Kristian Paolo De Luna100% (1)
- Purlins Sample DesignDocument8 pagesPurlins Sample DesignJake CortezNo ratings yet
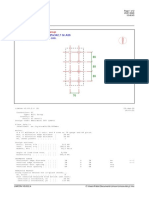
- PedestalP2 - (350x350) 7Document23 pagesPedestalP2 - (350x350) 7Feroz Khan PatthanNo ratings yet
- CHAPTER 2 IntegrationDocument47 pagesCHAPTER 2 IntegrationUan CrackerzNo ratings yet
- Example NR 2. CH 4Document11 pagesExample NR 2. CH 4Tesfa Hundera100% (1)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- WF Monorail Beam MetricDocument21 pagesWF Monorail Beam MetricManish DuggadNo ratings yet
- TH Differential Calculus Solution PDFDocument4 pagesTH Differential Calculus Solution PDFEdwin Quinlat DevizaNo ratings yet
- Timber Stud EC5 Vertical CapacityDocument2 pagesTimber Stud EC5 Vertical CapacityDavid O'MearaNo ratings yet
- Bang Tinh Xa GoDocument56 pagesBang Tinh Xa GoThắngg TrịnhhNo ratings yet
- Topic 6 R01Document35 pagesTopic 6 R01LIK HENG LAUNo ratings yet
- Week 05 DeflectionsDocument109 pagesWeek 05 DeflectionsAsfin HaqueNo ratings yet
- Multiple-Choice Test Finite Difference Method: X X DX y DDocument4 pagesMultiple-Choice Test Finite Difference Method: X X DX y DDr Razak Olusegun Alli-OkeNo ratings yet
- Calculation Sheet: Title: RC Girder Design Rev.: 1Document1 pageCalculation Sheet: Title: RC Girder Design Rev.: 1iwanguna71No ratings yet
- Panel Type Case No. : Analysis & Design of SlabDocument3 pagesPanel Type Case No. : Analysis & Design of SlabMiky TemaNo ratings yet
- Chapter 4 TorsionDocument50 pagesChapter 4 TorsionIbnu Omar AlakiNo ratings yet
- Seismic Thesis Bldg. 2Document26 pagesSeismic Thesis Bldg. 2ramel sigueNo ratings yet
- Design of Slab SDocument25 pagesDesign of Slab Sapi-19754583No ratings yet
- Design Office: Invention Steel Industries Person in Charge: YJT Construction Project: Sqm-Nizwa Number: 0811 Position: Date: 7/22/2014Document4 pagesDesign Office: Invention Steel Industries Person in Charge: YJT Construction Project: Sqm-Nizwa Number: 0811 Position: Date: 7/22/2014yusuf_jtNo ratings yet
- A-1. SPREADER BAR CALCULATION - Spreader Bar-01Document4 pagesA-1. SPREADER BAR CALCULATION - Spreader Bar-01swapnil0211No ratings yet
- Connections 1 - Ch.6 Bolted Shear Connections - Exercise Solutions (2 of 2) (233-248)Document14 pagesConnections 1 - Ch.6 Bolted Shear Connections - Exercise Solutions (2 of 2) (233-248)travis8zimmermannNo ratings yet
- Earthquake Base ShearDocument11 pagesEarthquake Base ShearRajeev BatuwitageNo ratings yet
- Chapter 3 - Problem Solutions Problems Are Form Ugural's Book Chapter 3, Problem 29Document8 pagesChapter 3 - Problem Solutions Problems Are Form Ugural's Book Chapter 3, Problem 29Fatih AŞCINo ratings yet
- Fluid FlowDocument30 pagesFluid FlowudayakumarNo ratings yet
- Vdocuments - MX Kruger Criticalspeeds ShaftsDocument5 pagesVdocuments - MX Kruger Criticalspeeds ShaftsPRASHANT GOURNo ratings yet
- Ch22-Guass QuadratureDocument18 pagesCh22-Guass QuadratureeleenaamohapatraNo ratings yet
- Multiple-Choice Test Shooting Method: X X DX y DDocument4 pagesMultiple-Choice Test Shooting Method: X X DX y DDr Razak Olusegun Alli-OkeNo ratings yet
- LAGOS DORMITORY-BeamDesignDocument147 pagesLAGOS DORMITORY-BeamDesignadetokunbo fapuroNo ratings yet
- MDESIGN Shaft, DIN 743 PDFDocument29 pagesMDESIGN Shaft, DIN 743 PDFSynbedNo ratings yet
- Elastomeric BRG1Document7 pagesElastomeric BRG1vivekNo ratings yet
- University of South Pacific CV211: Solid Mechanics IDocument6 pagesUniversity of South Pacific CV211: Solid Mechanics IKrish ChandNo ratings yet
- Apparent AssignmetDocument115 pagesApparent AssignmetMahlet EshetuNo ratings yet
- Rebar CalculationDocument8 pagesRebar CalculationMohammad ImranNo ratings yet
- AOR - GANTRIS - 18m Span OverheadDocument5 pagesAOR - GANTRIS - 18m Span OverheadDaljit624No ratings yet
- Engineering Beam Theory For The First Order Analysis With Finite Element MethodDocument46 pagesEngineering Beam Theory For The First Order Analysis With Finite Element MethodPredatator90No ratings yet
- CONNECTION: G1 - Bolt Group: Gusset Plate (Min.) : 152,2x25x342,7 Gr.A36 Bolts: 8 X 1" A325ST/N in 2 ColsDocument2 pagesCONNECTION: G1 - Bolt Group: Gusset Plate (Min.) : 152,2x25x342,7 Gr.A36 Bolts: 8 X 1" A325ST/N in 2 ColsmascalzoneNo ratings yet
- BFC 20903 (Mechanics of Materials) Chapter 6: Torsion: Shahrul Niza Mokhatar Shahruln@uthm - Edu.myDocument26 pagesBFC 20903 (Mechanics of Materials) Chapter 6: Torsion: Shahrul Niza Mokhatar Shahruln@uthm - Edu.myRoger Jayson MercadoNo ratings yet
- Topic 7 Deflections of BeamsDocument55 pagesTopic 7 Deflections of BeamsAndrew WilliamNo ratings yet
- Chap07 ShaftsDocument8 pagesChap07 ShaftsFatih AŞCINo ratings yet
- Complementary XRD-Prof. GolestanifardDocument28 pagesComplementary XRD-Prof. Golestanifardmohammad zareNo ratings yet
- Punching ShearDocument2 pagesPunching Shearsamloo1997No ratings yet
- Beam Reinforcement CalculationDocument8 pagesBeam Reinforcement CalculationAnish KumarNo ratings yet
- UNIT-05. Torsion and Buckling of Columns: Lecture Number-1 Mr. M.A.Mohite Mechanical Engineering S.I.T., LonavalaDocument15 pagesUNIT-05. Torsion and Buckling of Columns: Lecture Number-1 Mr. M.A.Mohite Mechanical Engineering S.I.T., LonavalaCrimson WestNo ratings yet
- Deflection Due To Creep and ShrinkageDocument3 pagesDeflection Due To Creep and ShrinkagekarthiNo ratings yet
- Solid Geometry SolutionsDocument8 pagesSolid Geometry SolutionsAndie Krystia RonoNo ratings yet
- Design Bolt - FD02 BracketDocument2 pagesDesign Bolt - FD02 BracketCon CanNo ratings yet
- Rebar CalculationDocument8 pagesRebar CalculationEr Pranabesh SenNo ratings yet
- Seismic Analysis: C Yc Ix IyDocument23 pagesSeismic Analysis: C Yc Ix Iyramel sigueNo ratings yet
- Topic 2 Cables and ArchesDocument29 pagesTopic 2 Cables and ArchesLIK HENG LAUNo ratings yet
- Topic 6 R01Document35 pagesTopic 6 R01LIK HENG LAUNo ratings yet
- L2 Social Performance MeasurementDocument19 pagesL2 Social Performance MeasurementLIK HENG LAUNo ratings yet
- Introduction To: Social EntrepreneurshipDocument26 pagesIntroduction To: Social EntrepreneurshipLIK HENG LAUNo ratings yet
- CP CVDocument10 pagesCP CVSurajNo ratings yet
- P4.1 Movement Knowledge OrganiserDocument3 pagesP4.1 Movement Knowledge Organisertowhidalam232No ratings yet
- Physical Biochemistry Lecture NotesDocument9 pagesPhysical Biochemistry Lecture Noteschc300No ratings yet
- Chapterwise-Examinations Question II Puc (2014 To 2022) PDFDocument52 pagesChapterwise-Examinations Question II Puc (2014 To 2022) PDFROHANNo ratings yet
- Mollier Hs Diagram Full Scale A3 FreeDocument1 pageMollier Hs Diagram Full Scale A3 FreeResa WaskitaNo ratings yet
- Full Chapter Advances in Heat Transfer 52 1St Edition J P Abraham J M Gorman W J Minkowycz PDFDocument53 pagesFull Chapter Advances in Heat Transfer 52 1St Edition J P Abraham J M Gorman W J Minkowycz PDFjames.king789100% (3)
- Chem 156 4th Departmental Exam Advanced ProblemsDocument1 pageChem 156 4th Departmental Exam Advanced Problemsapi-3856754No ratings yet
- AITS - 08 - Test Paper - Lakshya NEET 2024Document21 pagesAITS - 08 - Test Paper - Lakshya NEET 2024sainachitkaraNo ratings yet
- 7 Kinetic FrictionDocument16 pages7 Kinetic FrictionOsama HarbNo ratings yet
- Fundamental EquationDocument7 pagesFundamental Equationlmcristina5No ratings yet
- Etd Question-2Document2 pagesEtd Question-2karthiyuvenNo ratings yet
- Question Paper Depth in PhysicsDocument20 pagesQuestion Paper Depth in PhysicsTheNo ratings yet
- Industrial Plant DesignDocument5 pagesIndustrial Plant DesignMarvin BayanayNo ratings yet
- Physics Lab - Experiment 3 Written ReportDocument7 pagesPhysics Lab - Experiment 3 Written ReportniceNo ratings yet
- Chapter 18 - Temperature, Heat, and The First Law of ThermodynamicsDocument18 pagesChapter 18 - Temperature, Heat, and The First Law of ThermodynamicsVV Cephei100% (1)
- Fluid Mechanics - Unit 3 - Justine T. SaldivarDocument15 pagesFluid Mechanics - Unit 3 - Justine T. SaldivarJustine Tizon SaldivarNo ratings yet
- Quest Homework Solutions PhysicsDocument4 pagesQuest Homework Solutions Physicsg3qbx13s100% (1)
- Amprobe IRDocument2 pagesAmprobe IRLester MuscaNo ratings yet
- Form 4 Ujian OgosDocument3 pagesForm 4 Ujian Ogosjesunathan44@yahoo.comNo ratings yet
- CALCULO DE CARGA TERMICA PARA AIRE ACONDICIONADO - PoligonoDocument8 pagesCALCULO DE CARGA TERMICA PARA AIRE ACONDICIONADO - PoligonoCarlos EduardoNo ratings yet
- 03 Driving Force For SolidificationDocument8 pages03 Driving Force For SolidificationhsemargNo ratings yet
- Carbon Dioxide: Pressure - Enthalpy Diagram: R 90 0 Sity 7 00 KG/MDocument1 pageCarbon Dioxide: Pressure - Enthalpy Diagram: R 90 0 Sity 7 00 KG/MJackNo ratings yet
- Psych RometryDocument6 pagesPsych Rometrypammy313No ratings yet
- FSK ScopeDocument4 pagesFSK ScopeHope DlaminiNo ratings yet
- Thermal Buckling of Uniformly Heated Unidirectional and Symmetric Cross-Ply Laminated Fiber-Reinforced Composite Uniaxial In-Plane Restrained Simply Supported Rectangular PlatesDocument13 pagesThermal Buckling of Uniformly Heated Unidirectional and Symmetric Cross-Ply Laminated Fiber-Reinforced Composite Uniaxial In-Plane Restrained Simply Supported Rectangular PlatesEsra GürünNo ratings yet