Professional Documents
Culture Documents
AU Predavanje10
Uploaded by
Jacob CarterCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
AU Predavanje10
Uploaded by
Jacob CarterCopyright:
Available Formats
Automatsko upravljanje 2008/2009
Prof.dr.sc. Nedjeljko Peric, Prof.dr.sc. Zoran Vukic Doc.dr.sc. Mato Baotic, dr.sc. Mario Vaak
Zavod za automatiku i ra unalno inenjerstvo c Fakultet elektrotehnike i ra unarstva c
Predavanje 10 - Polovi, nule i vremenski odzivi
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
1 / 61
Uvod
Saetak Predavanja 09
Frekvencijske karakteristike mogu se prikazati na vie na ina; za c
praksu su najvaniji Nyquistov i Bodeov dijagram Nyquistov dijagram predstavlja gra ki prikaz G(j) = A()ej() u c kompleksnoj G-ravnini, gdje je parametar Nyquistov i Bodeov dijagram daju brzi uvid u vladanje sustava; iz njih se jednostavno o ita poja anje i fazno kanjenje c c _ (prethodenje) za razli ite frekvencije c U frekvencijskim podru jima u kojima asimptote dobro prate c amplitudno-frevencijsku karakteristiku Bodeova dijagrama (s pozitivnim ili negativnim nagibom) sustav se moe aproksimirati derivatorom odnosno integratorom Neminimalnost faze odnosi se na sustave koji imaju nule i polove u desnoj poluravnini kompleksne s-ravnine Stvorena je osnova za analizu stabilnosti linearnih vremenski nepromjenljivih sustava zasnovanu na frekvencijskim karakteristikama
c 2008 Peric,Vukic,Baotic&Vaak
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
2 / 61
Uvod
Cilj
Razumjeti vezu izmedu poloaja polova i nula u kompleksnoj
s-ravnini i vremenskih odziva sustava s-podru je c
Pokazati kako se vremenski pokazatelji kvalitete preslikavaju u Pokazati kakav je utjecaj nula u desnoj poluravnini kompleksne
s-ravnine na odziv sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
3 / 61
Polovi i nule prijenosne funkcije
Polovi i nule prijenosne funkcije
Prijenosna funkcija, denirana kao odnos Laplaceove
transformacije izlaza sustava i Laplaceove transformacije njegova ulaza uz po etne uvjete jednake nuli, u opcem se slu aju moe c c izraziti odnosom dvaju polinoma: G(s) =
def
Y (s) B(s) = U(s) N(s)
(10-1)
Uz pretpostavku da polinomi B i N nemaju zajedni kih nul-to aka c c Iz N(s) = 0 slijede kona ni polovi sustava c Iz B(s) = 0 slijede kona ne nule sustava c Napomena: U daljnjem tekstu se pod pojmovima polovi i nule
sustava podrazumijevaju kona ni polovi i nule sustava c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
4 / 61
Sustavi prvog reda
Sustav prvog reda bez nule
Sustav prvog reda bez nule
Prijenosna funkcija PT1 -sustava:
G(s) =
K s+a
1 c gdje je sp1 = a pol sustava, a s T = a ozna ava se vremenska konstanta sustava Ako je a > 0, sustav je stabilan (Re(spi ) < 0)
g(at) 1 K 0.9
0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 1 2 3 4 5 6 7 8 9 10
g(t) = Keat , t 0 h(t) = K K eat , t 0 a a
(10-2)
a h(at) 1 K 0.9
0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 1 2 3 4 5 6 7 8 9 10
at
at
Slika 10.1: Teinska funkcija PT1 -sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
Slika 10.2: Prijelazna funkcija PT1 -sustava
c 2008 Peric,Vukic,Baotic&Vaak
5 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Prijenosna funkcija sustava prvog reda s nulom u lijevoj poluravnini s-ravnine (1)
Opci oblik prijenosne funkcije sustava prvog reda s nulom u lijevoj
poluravnini s-ravnine:
G(s) = K
s+b s+a
(10-3)
Primjer 10.1: Realizacija G(s) iz (10-3). Jednostavna realizacija
prijenosne funkcije (10-3) sklopom s operacijskim poja alom c (shvacenim kao idealno poja alo), Slika 10.3, glasi: c G(s) = U2 (s) 1 + Ts a s+b = K1 = K1 , U1 (s) 1 + Ts bs+a
C2
C1
(10-4)
pri cemu je K1 stati ko c poja anje sustava, a T i T su c odgovarajuce vremenske konstante, te je prema (10-3) 1 a = T , b = 1 , K = K1 a T b
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
R
u2
u1
Slika 10.3: Realizacija G(s) iz (10-3)./ 61 c 2008 Peric,Vukic,Baotic&Vaak 6
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Primjer 10.1: Realizacija G(s) iz (10-3) (2)
Parametri prijenosne funkcije (10-4) odredeni su pasivnim
komponentama sklopa:
K1 = 1, T = RC1 , =
C2 C1
Ovisno o vrijednosti parametra dobiju se razli iti odzivi sklopa c
(shvacenog kao sustav)
(a) 0 < < 1
G(s) =
1 + Ts 1 + Ts (1 )Ts = + = 1+ 1 + Ts 1 + Ts 1 + Ts
1 1
Ts (10-5) 1 + Ts
Fazna karakteristika sklopa (prijenosne funkcije) ima fazno
_ _ prethodenje (o primjeni elementa s faznim prethodenjem bit ce rije i c u narednim predavanjima) Iz (10-5) vidljivo je da se ovaj clan moe promatrati kao paralelni spoj P- lana jedini nog poja anja i DT1 - lana (u cjelini: PDT1 - lan) c c c c c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
7 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Primjer 10.1: Realizacija G(s) iz (10-3) (3)
(a) 0 < < 1 Iz (10-5) dobiju se g(t) i h(t) prikazani Slikom 10.4 i Slikom 10.5
1 1 1 g(t) = (t) + 1 T e T , t 0 t T 1 h(t) = 1 + 1 e , t 0
g
t T
(10-6)
t T
0 t T
1 2 T
t T
Slika 10.4: Teinska funkcija sustava 1+Ts G(s) = 1+Ts uz 0 < < 1
Slika 10.5: Prijelazna funkcija sustava 1+Ts G(s) = 1+Ts uz 0 < < 1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
8 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Primjer 10.1: Realizacija G(s) iz (10-3) (4)
(b) > 1 Prijenosna funkcija ima oblik (10-4), ali ju zapisujemo na na in c G(s) =
1 1 1 + 1 + Ts
(10-7)
Fazna karakteristika sklopa (prijenosne funkcije) ima fazno kanjenje (o
_ primjeni elementa s faznim kanjenjem bit ce takoder rije i u c narednim predavanjima) Prema (10-7) ovaj se sustav sastoji od paralelnog spoja P- lana c 1 poja anja < 1 i PT1 - lana (u cjelini: PPT1 - lan) c c c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
9 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Primjer 10.1: Realizacija G(s) iz (10-3) (5)
(b) > 1 Analiti ki izrazi za teinsku i prijelaznu funkciju isti su kao i za slu aj s c c _ faznim prethodenjem, razlika u odzivima prikazanim na Slici 10.6 i Slici 10.7 proizlazi iz razlike u iznosu parametra :
1 1 1 g(t) = (t) + 1 T e T , t 0 t 1 h(t) = 1 + 1 e T , t 0
g
t T
(10-8)
t T
1 1 2 T 1
t T
t T
Slika 10.6: Teinska funkcija sustava 1+Ts G(s) = 1+Ts uz > 1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
Slika 10.7: Prijelazna funkcija sustava 1+Ts G(s) = 1+Ts uz > 1
c 2008 Peric,Vukic,Baotic&Vaak
10 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Osvrt na Primjer 10.1. (1)
Usporedbom odziva PT1 -sustava i onih dobivenih u Primjeru 10.1.
stje e se uvid u bitan utjecaj nula prijenosne funkcije sustava na c vremenski odziv Pri tome je, nadalje, vano u kakvom su odnosu vrijednosti nula i polova (odnosno pripadajucih vremenskih konstanata) prijenosne funkcije
Nule iz lijeve poluravnine kompleksne s-ravnine koje su blie
imaginarnoj j-osi nego polovi dominantnije utje u na vremenski c odziv sustava prijelazne funkcije h(t) (Slika 10.5): za vrijednosti bliske nuli "pica" poprima enormno visoke vrijednosti (za promatrani sklop neizvedive!)
Ta se dominantnost ogleda u izraenom nadvienju (pici)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
11 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Osvrt na Primjer 10.1. (2)
Za 0 (izraeno fazno prethodenje) nazivnik prijenosne funkcije
G(s) =
1 + Ts 1 + Ts
moe se zanemariti, pa ona poprima svojstva PD- lana (pol c 1 sp1 = T puno je udaljen od ishodita u odnosu na nulu sN1 = 1 ): T G(s) 1 + Ts
Nasuprot tome, za velike iznose (izraeno fazno kanjenje), tj. za
1 dominantniji utjecaj pola u odnosu na nulu (pol T puno je blii 1 ishoditu u odnosu na nulu T ), prijenosna se funkcija moe aproksimirati PT1 - lanom vremenske konstante T , a u daljnjoj c aproksimaciji i I- lanom integracijske konstante T : c 0
G(s)
1 1 1 1 + Ts Ts
c 2008 Peric,Vukic,Baotic&Vaak
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
12 / 61
Sustavi prvog reda
Sustavi prvog reda s nulom u lijevoj poluravnini s-ravnine
Osvrt na Primjer 10.1. (3)
Provedena razmatranja vezana za utjecaj polova i nula na
vremenski odziv sustava mogla bi se osvijetliti i analizom pripadajuce frekvencijske karakteristike promatranog primjera G(j) = 1 + jT 1 + jT
pomocu Nyquistova i Bodeova dijagrama
Napomena: Analiza prethodne frekvencijske karakteristike
pomocu Nyquistova i Bodeova dijagrama samostalni rad studenata
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
13 / 61
Sustavi drugog reda
Sustav drugog reda bez nula
Sustav drugog reda bez nula (PT2 - lan) (1) c
Primjer 10.2.: Sustav drugog reda bez nula dan je prijenosnom
funkcijom:
G(s) =
1 2 2s
1 2 = (s + 1)(s + 2) + 3s + 1 2
te teinska i prijelazna funkcija proizlaze primjenom inverzne Laplaceove transformacije:
2 G(s) = (s+1)(s+2) = 2 H(s) = s(s+1)(s+2) = 1 + s 2 s+1 2 s+1
+ +
2 s+2 1 s+2
g(t) = 2et 2e2t , t 0 h(t) = 1 2et + e2t , t 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
14 / 61
Sustavi drugog reda
Sustav drugog reda bez nula
Primjer 10.2: Sustav drugog reda bez nula (PT2 - lan) (2) c
g(t)
0.5
h(t)
1 0.9
0.4
0.8 0.7
0.3
0.6 0.5
0.2
0.4 0.3
0.1
0.2 0.1
10
t [s]
10
t [s]
Slika 10.8: Teinska funkcija sustava 2 prijenosne funkcije G(s) = (s+1)(s+2)
Slika 10.9: Prijelazna funkcija sustava 2 prijenosne funkcije G(s) = (s+1)(s+2)
Prijelazna i teinska funkcija karakterizirane su modovima e1t i Pol sp1 = 1 blie je j-osi i vie utje e na vrijeme potrebno za c
e2t koji su posljedica polova sustava sp1 = 1 i sp2 = 2
dostizanje ustaljenog stanja; ukoliko bi se pol sp2 = 2 dodatno udaljio od ishodita, njegov utjecaj na to vrijeme bio bi oslabljen
c 2008 Peric,Vukic,Baotic&Vaak
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
15 / 61
Sustavi drugog reda
Sustav drugog reda s nulom u lijevoj poluravnini s-ravnine
Sustav drugog reda s jednom nulom u lijevoj poluravnini s-ravnine
Primjer 10.3: Prijenosna funkcija, te teinska i prijelazna funkcija
sustava drugog reda s nulom u lijevoj poluravnini s-ravnine G(s) =
g(t)
5
4s+2 s 2 +3s+2
2 = 4 (s+1)(s+2)
s+ 1
g(t) = 6e2t 2et , t 0 h(t) = 1 3e2t + 2et , t 0
h(t)
1.2
1 0.8 0.6
0.4
1 2 0 1 3 4 5 6 7 8 9 10
0.2 0 1 2 3 4 5 6 7 8 9 10
t [s]
t [s]
Slika 10.10: Teinska funkcija sustava
2 prijenosne funkcije G(s) = 4 (s+1)(s+2)
Slika 10.11: Prijelazna funkcija sustava
2 prijenosne funkcije G(s) = 4 (s+1)(s+2)
s+ 1
s+ 1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
16 / 61
Sustavi drugog reda
Sustav drugog reda s nulom u lijevoj poluravnini s-ravnine
Osvrt na Primjer 10.2. i Primjer 10.3.
Usporedbom prijelaznih funkcija u Primjeru 10.2. (Slika 10.9) i u
Primjeru 10.3. (Slika 10.11) o ito je da sustavi drugog reda s istim c rasporedom polova i istim stati kim poja anjem mogu imati bitno c c razli ita ponaanja ovisno o postojanju nula c _ Nula u lijevoj poluravnini s-ravnine u odredenom rasponu svojih vrijednosti ubrzava prijelaznu pojavu u sustavu Moe se uo iti da je odziv h(t) u Primjeru 10.3. dobiven na sljedeci c na in: c H(s) =
4s s(s+2)(s+1)
2 s(s+2)(s+1)
h(t) = 2g(t)Primjer 10.2. + h(t)Primjer 10.2.
Ustvari, uz isto stati ko poja anje sustava, ukoliko bi nula bila blie c c
ishoditu, koecijent uz g(t)Primjer 10.2. bio bi veci pa bi prijelazna funkcija h(t) imala vece nadvienje _ Obrnuti efekt dogadao bi se udaljavanjem nule od ishodita u smjeru negativne realne osi; koecijent uz g(t)Primjer 10.2. pribliava se nuli, nadvienje nestaje te kona no h(t) hPrimjer 10.2. (t) c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
17 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Sustav drugog reda s konjugirano-kompleksnim parom polova i bez nula (PT2 S- lan) c
Opci oblik prijenosne funkcije sustava drugog reda bez nula ima
oblik (ponavljanje s Predavanja 09): G(s) =
1 2 2s n
K +
2 n s
+1
(10-9)
gdje je: n prirodna frekvencija nepriguenih oscilacija [s1 ] relativni koecijent priguenja K stati ko poja anje sustava c c
Kada je || < 1, polovi sustava predstavljaju konjugirano-kompleksni
par, a odziv sustava posjeduje harmoni ke komponente c
Oscilatoran PT2 -sustav nosi oznaku PT2 S (dodatno slovo S u oznaci
potje e od njem. Schwingungen oscilacije) c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
18 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Konjugirano-kompleksni par polova PT2 S-sustava
Polovi PT2 S-sustava, tj. nul-to ke c
polinoma nazivnika u (10-9) za slu aj || < 1 (relacije vrijede i c za || = 1): sp1,2 = jd , gdje je:
= n priguenje d = n 1 2 prirodna frekvencija priguenih oscilacija [s1 ]
sp,1
jIm(s) s-ravnina
(10-10)
n 0 Re(s)
sp,2
Kut = arccos je kut kojeg
radij-vektor pola zatvara s negativnom realnom osi (vidi Sliku 10.12)
Slika 10.12: Karakteristi ne veli ine c c vezane uz konjugirano-kompleksni par polova PT2 S-sustava
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
19 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Primjeri sustava koje se moe modelirati PT2 -sustavom
Neki primjeri sustava koje se moe prikazati prijenosnom
funkcijom (10-9):
RLC krug Mehani ki oscilatorni sustav (masa, opruga, priguiva ) c c Istosmjerni motor s nezavisnom i konstantnom uzbudom Segment cijevi za transport uida
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
20 / 61
_ Odnos izmedu poloaja polova i vremenskog odziva PT2 -sustava (1)
Sustavi drugog reda
Analiza sustava drugog reda bez nula
U ovisnosti o poloaju polova PT2 -sustava u kompleksnoj ravnini (tj.
o iznosima i n ) dobiju se slu ajevi prikazani sljedecom tablicom c (odzivi su prikazani za K = 1) Relativni koecijent priguenja 0<<1 Poloaj polova
= 0.1
= 0.5
-1.5 -1 -0.5 1 n 0.5 0 -0.5 -1 0.5 1
Prijelazna funkcija h(t)
h ( n t )
Im( s )
= 0.1
Re( s )
1.5
= 0.5
nt
Im( s )
1
n
1 0.5 1
1 0.8
h ( n t )
=1
0.5 -1.5 -1 -0.5 0 -0.5 -1
Re( s )
1.5
0.6 0.4 0.2
nt
0 5 10
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
21 / 61
_ Odnos izmedu poloaja polova i vremenskog odziva PT2 -sustava (2)
Relativni koecijent priguenja >1
-10 -9 -8 -7 -6 -5 -4
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Poloaj polova
Im( s )
Prijelazna funkcija h(t)
h ( n t )
=5
-3
3 2
=2
=5
1 -2 -1
1 0
-1
Re( s )
=2
-2 -3
nt
2 1.8
Im( s )
n
1 0.5 1
h ( n t )
=0
0.5 -1 -0.5 0 -0.5 -1
Re( s )
1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 5 10
nt
h ( n t )
Im( s )
1 < < 0
1 -1 -0.5
0.5 0 -0.5 -1 0.5 1
Re( s )
= 0.1
nt
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
22 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Odzivi PT2 -sustava za razne vrijednosti (1)
0 < < 1 (PT2 S vladanje)
sp1,2 = n jn
U ovom je slu aju prijelazna funkcija: c
1 2
h(t) = 1 en t
cos
1 2 t +
1 2
sin
1 2 t (10-11)
Jednadba (10-11) moe se zapisati i na sljedeci na in: c
h(t) = 1
Odavde slijedi
e n t
sin n 1 2 dh(t) = dt
1 2 t + arccos
(10-12)
g(t) =
n 1 2
et sin(d t)
c 2008 Peric,Vukic,Baotic&Vaak
(10-13)
23 / 61
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Odzivi PT2 -sustava za razne vrijednosti (2)
0 < < 1 (PT2 S vladanje) Grani ni slu aj = 0: c c h(t) = 1 cos(n t), g(t) = n sin(n t), (sp1,2 = jn , trajni oscilatorni odziv)
Grani ni slu aj = 1: c c
(10-14)
h(t) = 1 (1 + n t)en t , g(t) = n ten t , (sp1,2 = n , grani ni aperiodski odziv) c
(10-15)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
24 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Odzivi PT2 -sustava za razne vrijednosti (3)
0 < < 1 (PT2 S vladanje) Na temelju provedenih razmatranja slijedi da je relativni koecijent _ priguenja glavni cimbenik koji odreduje oscilatornost sustava, dok _ prirodna frekvencija nepriguenih oscilacija n odreduje brzinu odziva sustava To je ilustrirano grafovima g(t) i h(t) na Slici 10.13 i Slici 10.14, uz parametar
g ( n t ) / n
=1
= 0.7
=0 = 0.1 = 0.2 = 0.3 = 0.4 = 0.5
h ( n t )
=0 = 0.1
= 0.2
= 0.3 = 0.4 = 0.5
nt
=1
= 0.7
nt
Slika 10.13: Teinska funkcija PT2 S-sustava za razne rijednosti
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
Slika 10.14: Prijelazna funkcija PT2 S-sustava za razne rijednosti
c 2008 Peric,Vukic,Baotic&Vaak
25 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Odzivi PT2 -sustava za razne vrijednosti (4)
0 < < 1 (PT2 S vladanje) Priguivanje oscilatornog tijeka opisuje se pomocu Td = 1 n (10-16)
te se stoga Td naziva vremenskom konstantom priguivanja
Iz poloaja polova sp1 i sp2 od G(s) dade se Td neposredno odrediti
1 (Td = ), ili ga se pak moe odrediti pomocu tangente anvelope oscilatorne prijelazne funkcije
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
26 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Odzivi PT2 -sustava za razne vrijednosti (5)
> 1 (aperiodsko PT2 vladanje) U ovom slu aju prijenosna funkcija (10-9) ima dva negativna pola c sp1,2 = n n 2 1
p,1 p,2
Ako se deniraju vremenske konstante T1 = s 1 i T2 = s 1 slijedi
(serijski spoj dvaju PT1 clanova, tj. PT2 clan): G(s) =
K (1 + T1 s)(1 + T2 s)
Prijelazna funkcija za > 1 ima oblik:
h(t) = 1
+ 2
2 1
2 1
n +
2 1 t
2 1
2 1
2 1 t
(10-17)
< 0 polovi se nalaze u desnoj poluravnini pa je sustav nestabilan
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi 27 / 61
c 2008 Peric,Vukic,Baotic&Vaak
_ Vanost odnosa izmedu odziva i poloaja polova kod PT2 -sustava
U prijenosnoj funkciji G(s) =
K
2 1 2 s + n 2 n
Sustavi drugog reda
Analiza sustava drugog reda bez nula
s+1
n i u cijelosti karakteriziraju
vladanje sustava
Ova prijenosna funkcija zadovoljavajuce dobro nadomjeta i
prijenosne funkcije viih redova kod kojih je:
jedan par polova dominantan ostali polovi relativno daleko od j-osi (nedominantni polovi)
U praksi je ovo cest slu aj! c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
28 / 61
Sustavi drugog reda
Analiza sustava drugog reda bez nula
Dominantna dinamika sustava
nedominantni polovi dominantni par polova jIm(s) sp,1 s-ravnina d n 0 Re(s) sp,2
Slika 10.15: Raspored polova sustava s istaknutim dominantnim parom polova Dominatni par polova lei u s-ravnini najblie j-osi, opisuje
najsporije vlastito gibanje sustava i najja e utje e na njegovo c c dinami ko vladanje; d = n 1 2 , = n , = arccos c Na temelju dosadanjih razmatranja zaklju uje se da se pri sintezi c _ sustava upravljanja izborom mjesta polova u s-ravnini (odredenih _ sa i n ) odreduju dinami ki pokazatelji kvalitete sustava u c vremenskom podru ju (neposredni pokazatelji kvalitete) c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
29 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Neposredni pokazatelji kvalitete sustava upravljanja
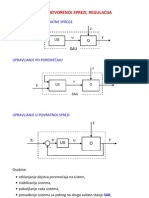
odziv upravljane (regulirane) veli ine y(t) odnosno regulacijsko c odstupanje e(t) uz djelovanje odabranog ispitnog signala (pobude); u ovom razmatranju pod pobudom ce se podrazumijevati signal referentne veli ine r ili signal poremecajne c veli ine z c Uobi ajeno se kao c Vladanje s z z' ispitni signal koristi obzirom na smetnju odsko na funkcija S(t) c te se promatra Vladanje s prijelazna funkcija s + + y e r + Regulacijski u obzirom na ureaj vodeu _ obzirom na referentnu + vrijednost veli inu y(t) = hr (t) c proces odnosno na poremecajnu veli inu c y(t) = hz (t) Slika 10.16: Pojednostavljena struktura sustava
upravljanja
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
Pri analizi kvalitete upravljanja (regulacije) promatra se vremenski
30 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
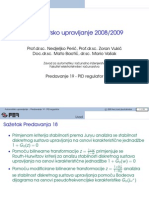
Pokazatelji kvalitete prijelazne funkcije s obzirom na referentnu veli inu c
Pokazatelji kvalitete hr (t)
Za opis prijelazne funkcije hr (t) koriste se sljedeci pojmovi
(neposredni pokazatelji kvalitete):
maksimalno nadvienje m (engl. peak, overshoot) vrijeme prvog maksimuma tm (engl. time to maximum overshoot) vrijeme porasta tr (engl. rise time) vrijeme ustaljivanja t (engl. settling time)
y(t)=h r(t) 100% 90% 50% 10% 0% tz tangenta u toki infleksije
2 W
t50 tu
tr
ta
tm
Slika 10.17: Neposredni pokazatelji kvalitete odziva sustava upravljanja na odsko nu funkciju referentne veli ine c c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
31 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Pokazatelji kvalitete prijelazne funkcije s obzirom na referentnu veli inu c
Maksimalno nadvienje (1)
Maksimalno nadvienje m =emax =Mp odreduje iznos maksimalnog
regulacijskog odstupanja nakon prvog dostizanja stacionarnog stanja Za sustav drugog reda (prema prijenosnooj funkciji (10-9)) maksimalno postotno nadvienje odredeno je izrazom: m [%] =
h(tm ) K 100% = 100 e 12 K
(10-18)
Izraz (10-18) dobiven je sljedecim izvodom:
dh(t) k =0 t = dt n 1 2
Za k = 1 dobije se
(10-19)
t = tm =
h(tm ) = 1 + e
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
1 2
(10-20)
c 2008 Peric,Vukic,Baotic&Vaak
1 2
32 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Pokazatelji kvalitete prijelazne funkcije s obzirom na referentnu veli inu c
Maksimalno nadvienje (2)
Dakle, m ovisi jedino o relativnom koecijentu priguenja kao
_ parametru koji odreduje poloaj konjugirano kompleksnih polova u s-ravnini: m = f (), = f 1 (m ) (10-21)
100 80 60 40 20
m [ % ] = f1 ( )
0.1 0.2 0.3 0.4 0.5 0.6
0.7 0.8
0.9 1.0
Slika 10.18: Ovisnost m o
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
33 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Pokazatelji kvalitete prijelazne funkcije s obzirom na referentnu veli inu c
Vrijeme prvog maksimuma, vrijeme porasta
Vrijeme prvog maksimuma tm (tm =tp ) je vrijeme pri kojem se
pojavljuje maksimalno nadvienje tm = n
1 2
(10-22)
Napomena: prethodni izraz za tm to an je za promatrani sustav c drugog reda, a zadovoljavajuce prihvatljiv i za sustave vieg reda Vrijeme porasta tr denira se kao vrijeme za koje prijelazna funkcija hr (t) poraste od vrijednosti 0 (ili 0.1hr ()) na vrijednost kr hr (), gdje se u literaturi uobi ajeno koristi kr = 0.9 ili kr = 1; za sustav c drugog reda (prema prijenosnoj funkciji (10-9)) i za = 0.5 je: tr 1.8 n (10-23)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
34 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Pokazatelji kvalitete prijelazne funkcije s obzirom na referentnu veli inu c
Vremena porasta ta i ta,50 , vrijeme zadravanja tz , ulazno vrijeme tu
U nastavku se obrazlau i neke druge denicije vremena porasta
koja se koriste u praksi:
Vrijeme porasta ta dobiveno iz to aka sjecita tangente, povu ene u c c
Cesto se koristi tangenta povu ena u to ki odredenoj vremenom t50 c c kod koje hr (t) poprima iznos 0, 5hr () u tom se slu aju vrijeme c porasta ozna ava s ta,50 c Takoder, prakti no je denirati i pojmove vezane za neposredne c
to ki ineksije W prijelazne funkcije hr (t), s linijama hr (0) i hr () c _
pokazatelje kvalitete sustava, a koji su bliski vremenu porasta:
tangente u to ki ineksije s vremenskom osi c _ tu tz + ta tr
Vrijeme zadravanja tz koje se dobije iz sjecita prethodno denirane Ulazno vrijeme tu kojim je odreden trenutak prvog dostizanja hr () Vrijedi priblina relacija:
(10-24)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
35 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Pokazatelji kvalitete prijelazne funkcije s obzirom na referentnu veli inu c
Vrijeme ustaljivanja t
Vrijeme ustaljivanja (smirivanja) t (t =ts =Ts ) kojim je odredeno
trajanje prijelaznog procesa nakon kojega hr (t) odstupa manje od zadanog iznosa (npr. = 1%, to odgovara vremenu ustaljenja t1% ) 4.6 n
Za vrijeme ustaljivanja vrijedi izraz:
t1%
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
36 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Pokazatelji kvalitete prijelazne funkcije s obzirom na poremecajnu veli inu c
Pokazatelji kvalitete s obzirom na odziv sustava na poremecajnu veli inu c
Na sli an se na in moe karakterizirati i vladanje sustava s obzirom c c
na poremecajnu veli inu c
I ovdje se na isti na in deniraju pojmovi maksimalno nadvienje i c
vrijeme ustaljenja, Slika 10.19
y(t)=hz (t) 100%
bez regulatora s regulatorom t
2 t
Slika 10.19: Neposredni pokazatelji kvalitete odziva sustava upravljanja na odsko nu funkciju poremecajne veli ine c c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
37 / 61
Neposredni pokazatelji kvalitete sustava upravljanja
Osvrt na neposredne pokazatelje kvalitete
Osvrt na neposredne pokazatelje kvalitete
Iz provedenih razmatranja slijedi da veli ine m i t neposredno c
ukazuju na priguenje sustava, dok je veli inama tu , ta , tr i tm c _ odredena brzina, odnosno dinamika sustava Sve prikazane veli ine (neposredni pokazatelji kvalitete u c _ vremenskom podru ju) odredene su iznosima i n koji deniraju c poloaj polova u s-ravnini U praksi se cesto ograni avamo na cetiri veli ine i to: tu (ili tr ) , tm , c c t i m _ Relacije za odredivanje ovih neposrednih pokazatelja kvalitete za sustav bez nula: tr = 1.8 n tm = t1% =
n 1 2
4.6 n
1 2
m [%] = 100e
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
38 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
Postavljanje zahtjeva na poloaj polova u s-ravnini
Na temelju povezanosti izmedu pokazatelja kvalitete vremenskog
vladanja sustava i poloaja polova sustava u s-ravnini moe se izborom zikalno prihvatljivih parametara n i dobiti eljeno vladanje sustava Ta cinjenica predstavlja osnovu za metodu sinteze zasnovanu na rasporedu polova (engl. pole placement method)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
39 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
Prikaz zahtjeva na sustav upravljanja u s-ravnini (1)
j
Zahtjev s obzirom na maksimalno nadvienje m m m,max 0 = f 1 (m,max ), 0 = arccos0
Doputeno 0 podru je c polova
Zahtjev s obzirom na vrijeme porasta tr (ta ; ta,50 ) tr tr,max n n,0 = f 1 (tr )
Doputeno podru je n,0 c polova
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
40 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
Prikaz zahtjeva na sustav upravljanja u s-ravnini (2)
j
Zahtjev s obzirom na vrijeme ustaljivanja t t t,max > 0 = f 1 (t,max )
Doputeno podru je c polova
Cjeloviti zahtjevi s obzirom na raspored polova
Doputeno podru je c polova
0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
41 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
_ Odredivanje i n zatvorenog regulacijskog kruga
Primjer 10.4: Zatvoreni regulacijski krug (1)
Zatvoreni regulacijski krug prema Slici 10.20 ima prijenosne funkcije
regulatora GR (s) i procesa Gp (s): 1 + TI s GR (s) = KR , TI s Gp (s) = Kp (1 + T1 s)(1 + T2 s)
R (s) +
-
GR ( s )
U (s)
Gp ( s )
Y (s)
Slika 10.20: Blokovski prikaz zatvorenog regulacijskog kruga
Ako se odabere TI = T1 , potrebno je u tom slu aju odrediti n i c
zatvorenog regulacijskog kruga
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
42 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
_ Odredivanje i n zatvorenog regulacijskog kruga
Primjer 10.4: Zatvoreni regulacijski krug (2)
Rjeenje (1)
Prijenosna funkcija otvorenog regulacijskog kruga (uz TI = T1 ) je:
Go (s) = GR (s) Gp (s) =
KR Kp , TI s(1 + T2 s)
odakle slijedi prijenosna funkcija zatvorenog sustava: Gr (s) = Go (s) KR Kp = = 1 + Go (s) TI T2 s 2 + TI s + KR Kp 1
TI T2 2 KR Kp s
TI KR Kp s
+1
Opci oblik prijenosne funkcije drugog reda je
G(s) =
1 2 2s n
2 n s
+1
pa usporedbom koecijenata u polinomima od Gr (s) i G(s) proizlazi: 1 TT 2 TI = I 2 , = 2 KR Kp n KR Kp n
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
43 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
_ Odredivanje i n zatvorenog regulacijskog kruga
Primjer 10.4: Zatvoreni regulacijski krug (3)
Rjeenje (2)
2 n =
KR Kp n = TI T2
KR Kp TI T2 TI KR Kp T2
2 TI n TI 1 = = = n KR Kp 2KR Kp 2 regulatora
Dakle, n i ovise o parametrima procesa i o parametrima Iz posljednjeg izraza slijedi
KR =
1 1 TI , 4 2 Kp T2
tj. poja anje regulatora ovisi o relativnom koecijentu priguenja, c pa se npr. za parametre procesa Kp = 10, T1 = 1 s, T2 = 0.1 s i za odabrani = 0.58 dobiva TI = 1s, KR = 0.74 i, posljedi no, c n = 8.6 s1
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
44 / 61
Prikaz zahtjeva na sustav upravljanja u s-ravnini
_ Odredivanje i n zatvorenog regulacijskog kruga
Primjer 10.4: Zatvoreni regulacijski krug (3)
Sklopovska izvedba regulatora s operacijskim poja alom c
Na elna izvedba regulatora s operacijskim poja alom prikazana je c c
na Slici 10.21
Izra unani parametri c
regulatora dobiju se, primjerice, uz otpor u ulaznoj grani poja ala R = 100 k, c otpor u povratnoj grani poja ala R = 75 k, te c kapacitet C = 13 F
Referentna veliina
75 = 0.75 100 TI = 75 103 13 106 F 1 s KR =
povratna veza
Slika 10.21: Izvedba regulatora sklopom s operacijskim poja alom c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
45 / 61
Sustav s konjugirano-kompleksnim parom polova i nulom u lijevoj poluravnini s-ravnine
Sustav s konjugirano-kompleksnim parom polova i nulom
Sustav drugog reda s konjugirano-kompleksnim parom polova i nulama
Sustav drugog reda s konjugirano-kompleksnim parom polova
c (razmatran ranije) moe sadravati i nule koje mogu zna ajno utjecati na vremenske odzive Primjer 10.5: Oscilatorni sustav drugog reda s nulom u lijevoj poluravnini s-ravnine Prijenosna funkcija sustava kojeg se razmatra u ovome primjeru je G(s) = s + n n 2 s 2 + 2n s + n (10-25)
pa pripadne teinska i prijelazna funkcija glase (|| < 1): g(t) = n en t
1
cos(n
1 2 t) + 1 2 t) +
1 1
1 2
sin(n sin(n
1 2 t) , t 0 1 2 t) , t 0
46 / 61
h(t) = 1 en t cos(n
1 2
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
Sustav s konjugirano-kompleksnim parom polova i nulom u lijevoj poluravnini s-ravnine
Sustav s konjugirano-kompleksnim parom polova i nulom
Primjer 10.5: Oscilatorni sustav drugog reda s nulom u lijevoj poluravnini s-ravnine
Iz prethodnih izraza o ito je da utjecaj nule sN1 = n slabi s c
porastom (usporedite g(t) i h(t) PT2 S-sustava (10-12) i (10-13) s netom navedenima izrazima za ) Za ilustraciju ovog efekta, na slikama 10.22 i 10.23 dani su grafovi teinskih i prijelaznih funkcija sustava G(s) (10-25) za = 0.5, kojemu se parametar mijenja u rasponu 0.25 10
g ( n t )
h ( n t )
4
2.5
= 0.25 = 0.5
3.5 3 2.5 2 1.5 1 0.5 0 -0.5 -1
= 0.25 = 0.5 =1 = 5, 8, 10
5 10
=1
1.5
= 5, 8, 10
0.5
n t
10
nt
Slika 10.22: Teinska funkcija za razne vrijednosti
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
Slika 10.23: Prijelazna funkcija za razne vrijednosti
c 2008 Peric,Vukic,Baotic&Vaak
47 / 61
Kracenje nula-pol (kompenzacija utjecaja nula na dinami ko vladanje sustava) c
Kracenje pola pobude i nule sustava
Kracenje pola pobude i nule sustava
Promotrimo prijenosnu funkciju koja ima jednostruku nulu:
G(s) =
s+a N(s)
(10-26)
1 s+a
Pretpostavimo da je pobuda sustava u(t) = eat , tj. U(s) = Tada je (Slika 10.24):
( ( t ) )
1 s+a
U (s)
s+a N (s)
Y (s)
( ( t ) )
1 N(s)
1 N ( s)
Y (s)
Slika 10.24: Kracenje pola pobude i nule sustava
Y (s) = G(s)U(s) = sustav
Nula sustava sN1 = a blokira prijenos signala u(t) = eat kroz To zna i da je za ovakvu pobudu potpuno blokiran dio prisilnog c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
odziva sustava koji odgovara partikularnom rjeenju diferencijalne jednadbe sustava
48 / 61
Kracenje nula-pol (kompenzacija utjecaja nula na dinami ko vladanje sustava) c
Kracenje nula i polova prijenosne funkcije
Kracenje nula i polova prijenosne funkcije (1)
Nule i polovi prijenosne funkcije mogu se medusobno kratiti ako
imaju jednake vrijednosti; kracenje nula i polova cesto se koristi u sintezi sustava upravljanja Ne preporu a se kracenje nula i polova u desnoj poluravnini c s-ravnine Primjer 10.6.: Sustav drugog reda s parametarski zadanom nulom G(s) = 2 s+a a 1 t a 2 2t g(t) = 2 e 2 e , t 0 a (s + 1)(s + 2) a a
Za a = 1 (kracenje pola sp1 = 1) dobije se:
G1 (s) =
2 g1 (t) = 2e2t , t 0 s+2 1 g2 (t) = et , t 0 s+1
c 2008 Peric,Vukic,Baotic&Vaak
Za a = 2 (kracenje pola sp2 = 2) dobije se:
G2 (s) =
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
49 / 61
Kracenje nula-pol (kompenzacija utjecaja nula na dinami ko vladanje sustava) c
Kracenje nula i polova prijenosne funkcije
Primjer 10.6: Sustav drugog reda s parametarski zadanom nulom (2)
Razmatrani sustav, s pripadnom diferencijalnom jednadbom,
G(s) =
2 s+a 2 Y (s) = y (t) + 3y(t) + 2y(t) = u(t) + 2u(t) U(s) a (s + 1)(s + 2) a
ima svojstvene vrijednosti 1 = 1 i 2 = 2, _ koje se pojavljuju u slobodnom odzivu sustava (odzivu nepobudenog sustava, koji je posljedica po etnih uvjeta y(0 ), y(0 )) za bilo koju vrijednost c parametra a, pa tako i za a = 1 i za a = 2 _ Medutim, za a = 1 ili a = 2 odziv mirnog sustava (po etni uvjeti = 0) c na bilo koju pobudu, koja ne sadri u sebi komponentu eat , nece sadravati vlastiti mod sustava eat
Razlog tome lei u cinjenici da svojstvena vrijednost sustava = a
nije i pol prijenosne funkcije sustava zbog kracenja nule i pola prijenosna funkcija G(s) za s = a ne tei u beskona no c (|G(a)| < )
c 2008 Peric,Vukic,Baotic&Vaak
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
50 / 61
Kracenje nula-pol (kompenzacija utjecaja nula na dinami ko vladanje sustava) c
Kracenje nula i polova prijenosne funkcije
Kracenje nula i polova prijenosne funkcije (3)
Dakle, svaki pol je i svojstvena vrijednost sustava, no svaka
svojstvena vrijednost sustava ne mora biti i pol sustava (zbog moguceg kracenja nula i polova) Prijenosna funkcija je i prije i poslije moguceg kracenja nula i polova matemati ki korektna, pa ispravno opisuje izlazno-ulazno c vladanje sustava, tj. dio sustava koji je istodobno i upravljiv i osmotriv
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
51 / 61
Neminimalno-fazni sustavi
Primjer 10.7: Oscilatorni sustav drugog reda s nulom u desnoj poluravnini s-ravnine (1)
Ponovno razmatramo prijenosnu funkciju (10-25) (vidi Primjer 10.5.):
G(s) =
n s + n , 2 s 2 + 2n s + n
i pripadajuce teinsku i prijelaznu funkciju (|| < 1): g(t) = n en t
1
cos(n
1 2 t) + 1 2 t) +
1 1
1 2
sin(n sin(n
1 2 t) , t 0 1 2 t) , t 0
h(t) = 1 en t cos(n
1 2
Razmotrimo prijelaznu funkciju sustava kada je < 0, tj. kada se
nula sustava sN1 = n nalazi u desnoj poluravnini s-ravnine (neminimalno-fazni sustav)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
52 / 61
Neminimalno-fazni sustavi
Primjer 10.7: Oscilatorni sustav drugog reda s nulom u desnoj poluravnini s-ravnine (2)
Za slu aj < 0 dobije se sustav s neminimalno-faznim vladanjem te c
je prijelazna funkcija za razne vrijednosti parametra dana na Slici 10.25 Usporedno je na Slici 10.26 prikazana i prijelazna funkcija sustava za vrijednosti parametra po iznosu iste, ali predznakom suprotne u odnosu na one sa Slike 10.25
h ( n t )
1 0.5 1.5
h ( n t )
2.5
= 0.25
= 0.5
2 1.5
=1
= 5, 8, 10
0 -0.5 -1 -1.5
= -5, -8, -10
10
nt
1 0.5
= 1
= 0.5
= 0.25
10
nt
Slika 10.25: Prijelazne funkcije za < 0
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
Slika 10.26: Prijelazne funkcije za > 0
c 2008 Peric,Vukic,Baotic&Vaak
53 / 61
Neminimalno-fazni sustavi
Primjer 10.7: Oscilatorni sustav drugog reda s nulom u desnoj poluravnini s-ravnine (3)
Za > 0 (sustav s minimalno-faznim vladanjem) za manje
vrijednosti (nula blie j-osi) nadvienja su izraenija
Za < 0 (sustav s neminimalno-faznim vladanjem) dobije se
podba aj u prijelaznoj funkciji za manje vrijednosti podba aji c c su izraeniji Navedene konstatacije slijede i iz analiti kih razmatranja c prijenosna funkcija (10-25) moe se prikazati kao:
2 2 n s + n n 1 n = 2 + s 2 2 2 2 s 2 + 2n s + n n s + 2n s + n s + 2n s + n (10-27) Iz (10-27) slijedi prijelazna funkcija
G(s) =
G(s) = G0 (s) +
1 1 d sG0 (s) h(t) = h0 (t) + h0 (t) n n dt
(10-28)
Iz (10-28) slijedi da ce sve prijelazne funkcije za razli ite vrijednosti c
prolaziti kroz to ke (t0,i , h0 (t0,i )), gdje za t0,i vrijedi h0 (t0,i ) = 0 c
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
54 / 61
Neminimalno-fazni sustavi
Prijelazne i teinske funkcije neminimalno-faznih sustava
Prijelazne i teinske funkcije neminimalno-faznih sustava imaju
inverzni odziv, odnosno podba aj (engl. undershoot) c Ovisno o tome radi li se o neminimalno-faznom sustavu s neparnim ili parnim brojem nula smjetenih u desnoj poluravnini s-ravnine dobiju se na elno razli iti vremenski odzivi c c
Uz neparni broj neminimalno-faznih nula prijelazna funkcija u trenutku
t = 0+ krece u suprotnu stranu u odnosu na stacionarno stanje, primjeri: G1 (s) =
1T1 s (1+T2 s)(1+T3 s) T1 s1 G2 (s) = 1+T s 2
T h1 (0+ ) = T 1 , h1 () = 1 T
h2 (0+ ) =
T1 , T2
2 3
h2 () = 1
Uz parni broj neminimalno-faznih nula prijelazna funkcija u trenutku
_ t = 0+ krece u stranu odredenu kona nim stacionarnim stanjem, c primjer: G3 (s) =
(1T1 s)(1T2 s) (1+T3 s)(1+T4 s)(1+T5 s)
h3 (0+ ) =
T1 T2 , T3 T4 T5
h3 () = 1
55 / 61
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
Neminimalno-fazni sustavi
Primjeri neminimalno-faznih sustava
Primjer 10.8: RC-mrea
Za RC-mreu danu na Slici 10.27 dobije
se prijenosna funkcija: G(s) = = =
U2 (s) U1 (s)
U1 (s) R+ 1 sC
Ua (s)Ub (s) U1 (s) U (s) 1 11 R sC
=
R
R+
sC
U1 (s) 1sRC 1+sRC
_ Uvodenjem T = RC prijenosna funkcija sklopa zapisuje se kao: G(s) = 1 Ts 1 + Ts (svepropusni clan prvog reda!)
u1
C
ua
u2
ub
R
Slika 10.27: RC-mrea
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
56 / 61
Neminimalno-fazni sustavi
Primjeri neminimalno-faznih sustava
Primjer 10.9: Elevacija zrakoplova u letu (1)
Prijenosna funkcija G(s) izmedu promjene visine leta zrakoplova
he [m] i zakreta krilaca e [ ] na njegovim stranjim krilima (Boeing 747, Slika 10.28) dana je sljedecom relacijom:
G(s) =
He (s) 30(2 s) = e (s) s(s 2 + 4s + 13)
Slika 10.28: Prikaz zrakoplova i mjesta zakreta krilaca
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
57 / 61
Neminimalno-fazni sustavi
Primjeri neminimalno-faznih sustava
Primjer 10.9: Elevacija zrakoplova u letu (2)
Odziv na tipi no upravlja ko djelovanje pilota na krilca pri c c
promjeni visine leta prikazan je Slikom 10.29 e [ ]
10 9 8 7 6 5 4 3 2 1 0
he [ m ]
250 200 150 100 50 0 -50
1.5 1 0.5 0 -0.5 -1 -1.5 0
10
t [s ]
podbaaj
0.5
10
t [s ]
Slika 10.29: Manevar promjene visine zrakoplova
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
58 / 61
Neminimalno-fazni sustavi
Primjeri neminimalno-faznih sustava
Primjer 10.10: Hidroelektrana (1)
Prijenosna funkcija koja
Elektrina snaga
priblino opisuje vladanje turbinsko-generatorskog sloga s privodnim aparatom glasi: 1 Ts P(s) = X (s) 1 + 0.5Ts gdje je:
P(s) - promjena mehani ke c
Mehanika snaga
(10-29)
Otvor privodnog aparata
snage turbine
X (s) - promjena otvora
privodnog aparata
T - vremenska konstanta
tromosti vode Slika 10.30: Turbinsko-generatorski slog s privodnim aparatom
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
59 / 61
Neminimalno-fazni sustavi
Primjeri neminimalno-faznih sustava
Primjer 10.10: Hidroelektrana (2)
Privodni aparat cine pomi ne lopatice cijim se zakretanjem c
_ odreduje protok vode kroz turbinu
Efekt tromosti vode uzrokuje u po etnom trenutku promjenu c
protoka vode (i snage proporcionalne protoku!) suprotnog smjera od promjene otvora privodnog aparata (zbog vece povrine otvora)
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
60 / 61
Zaklju ak c
Zaklju ak c
_ _ odreduje dinami ke pokazatelje kvalitete sustava u vremenskom c podru ju (neposredni pokazatelji kvalitete) c _ Dobivene su relacije za odredivanje neposrednih pokazatelja kvalitete sustava drugog reda bez nula:
Izbor mjesta polova u s-ravnini (odredenih parametrima i n )
tr =
1.8 n , 4.6 n ,
tm =
1 2
,
1 2
t1% =
m [%] = 100e
Te su relacije valjane i za sustave vieg reda od dva ako je jedan
par polova sustava dominantan, a ostali polovi relativno daleko od j-osi (nedominatni polovi) Nule sustava zna ajno utje u na vremenski odziv, ovisno o njihovu c c poloaju u odnosu na polove sustava Nule sustava iz desne poluravnine s-ravnine uzrokuju pojavu inverznog odziva zbog cega je ove sustave teko upravljati
Automatsko upravljanje :: Predavanje 10 - Polovi, nule i vremenski odzivi
c 2008 Peric,Vukic,Baotic&Vaak
61 / 61
You might also like
- AU Predavanje10 Bez AnimacijaDocument61 pagesAU Predavanje10 Bez AnimacijaTarik PiljugNo ratings yet
- AU Predavanje09Document68 pagesAU Predavanje09Jacob CarterNo ratings yet
- Analiza I Sinteza RegulatoraDocument6 pagesAnaliza I Sinteza RegulatoraFikret BašićNo ratings yet
- AU Predavanje09Document68 pagesAU Predavanje09Mario MarinNo ratings yet
- VJ A4 1Document9 pagesVJ A4 1chuck1337No ratings yet
- Automatsko UpravljanjeDocument22 pagesAutomatsko UpravljanjeMiladinm1No ratings yet
- DZ 4Document5 pagesDZ 4lc54005No ratings yet
- Oau PR 01 2009 16-10-2009Document39 pagesOau PR 01 2009 16-10-2009Zoran Zoki DzelajlijaNo ratings yet
- Predavanje - Stabilnost 1 (2 Slajda Po Stranici)Document27 pagesPredavanje - Stabilnost 1 (2 Slajda Po Stranici)Mirko MirkovicNo ratings yet
- Matlab Vjezba - 5 PDFDocument10 pagesMatlab Vjezba - 5 PDFNekoNikićNo ratings yet
- Dizajn PID Regulatora Na Osnovu Optimizacija Ogranicenja Drugi DioDocument3 pagesDizajn PID Regulatora Na Osnovu Optimizacija Ogranicenja Drugi DioOlja TešićNo ratings yet
- Interpolacija - Povr - Prvog I Drugog - RedaDocument15 pagesInterpolacija - Povr - Prvog I Drugog - RedasafetsalihovicNo ratings yet
- Text 3-10Document11 pagesText 3-10prevrtljivacNo ratings yet
- Teorija Mreza Linearne I Nelinearne MrezeDocument157 pagesTeorija Mreza Linearne I Nelinearne MrezeMambo JamboNo ratings yet
- Predavanje - Regulatori 1 (2 Slajda Po Stranici)Document23 pagesPredavanje - Regulatori 1 (2 Slajda Po Stranici)sadfawdNo ratings yet
- POUZDANOSTDocument100 pagesPOUZDANOSTGood Cat100% (1)
- Oau PR 01 03-10-2009Document50 pagesOau PR 01 03-10-2009mingo622No ratings yet
- Crtanje Bodeovih DijagramaDocument7 pagesCrtanje Bodeovih DijagramaAnonymous US9AFTR02No ratings yet
- AutomatikaDocument699 pagesAutomatikaDejan SamardzijaNo ratings yet
- Automatsko Upravljanje-ZbirkaDocument208 pagesAutomatsko Upravljanje-Zbirkaalex100% (1)
- TAU Ispit 2004-06-02 - IDocument1 pageTAU Ispit 2004-06-02 - IAnesNo ratings yet
- Racunalniske Vaje-Regulacijska TehnikaDocument34 pagesRacunalniske Vaje-Regulacijska TehnikarklemenNo ratings yet
- Automatika 3 DioDocument38 pagesAutomatika 3 DiodabamaricNo ratings yet
- Sustavi Automatizacije - IzvješćeDocument19 pagesSustavi Automatizacije - IzvješćeIvan GretićNo ratings yet
- AutomatizacijaDocument117 pagesAutomatizacijaJasmin Japa BandicNo ratings yet
- Vjezba 6Document19 pagesVjezba 6arnel89No ratings yet
- Zbirka Rijesenih ZadatakaDocument55 pagesZbirka Rijesenih ZadatakaMunever Mune AlagicNo ratings yet
- Primjeri Kontinuirane SimulacijeDocument94 pagesPrimjeri Kontinuirane SimulacijeLukaNo ratings yet
- Izvještaj LV6 - LukaFajdeticDocument15 pagesIzvještaj LV6 - LukaFajdeticLukaNo ratings yet
- Bodeovi Dijagrami OTSUDocument32 pagesBodeovi Dijagrami OTSUSinisaTomicNo ratings yet
- Stabilnost Digitalnih SistemaDocument14 pagesStabilnost Digitalnih SistemaVanja KaranNo ratings yet
- Laboratorijske Vježbe Iz Osnova Automatskog Upravljanja (Proces 2, Parametri 8) LV1 ETFOSDocument6 pagesLaboratorijske Vježbe Iz Osnova Automatskog Upravljanja (Proces 2, Parametri 8) LV1 ETFOSmaradroidNo ratings yet
- Analiza Nelinearnih Krugova 1 DioDocument38 pagesAnaliza Nelinearnih Krugova 1 DioVlado ŠegvićNo ratings yet
- AU 1.vjezbaDocument5 pagesAU 1.vjezbaBesim AdemiNo ratings yet
- LINEM-rješeni Ispitni ZadaciDocument77 pagesLINEM-rješeni Ispitni ZadaciIvan MicudajNo ratings yet
- InzMatET LaplaceDocument15 pagesInzMatET Laplaceharibo bomNo ratings yet
- Osnove AutomatizacijeDocument5 pagesOsnove AutomatizacijeEmir MehmedovićNo ratings yet
- Vodjenje Procesa U ProizvodnjiDocument72 pagesVodjenje Procesa U ProizvodnjiMark LetingerNo ratings yet
- Tehnike Mrežnog PlaniranjaDocument44 pagesTehnike Mrežnog Planiranjabrco11No ratings yet
- Energy 0504Document80 pagesEnergy 0504Jacob CarterNo ratings yet
- Energy 0901Document104 pagesEnergy 0901Jacob CarterNo ratings yet
- Energy 0902Document108 pagesEnergy 0902Jacob CarterNo ratings yet
- Časopis HepDocument84 pagesČasopis HepedinNo ratings yet
- 0903Document116 pages0903rkone001No ratings yet
- UEMP Prezentacija1 30102006Document10 pagesUEMP Prezentacija1 30102006Jacob CarterNo ratings yet
- UEMP Predavanje2 27112006Document30 pagesUEMP Predavanje2 27112006Jacob CarterNo ratings yet
- Mi2 Au 2008 09Document7 pagesMi2 Au 2008 09Jacob CarterNo ratings yet
- AU Zadatci19Document5 pagesAU Zadatci19Jacob CarterNo ratings yet
- ZIDocument5 pagesZIJacob CarterNo ratings yet
- Ponovljeni Završni Ispit: Es EsDocument6 pagesPonovljeni Završni Ispit: Es EsJacob CarterNo ratings yet
- Mi1 Au 2008 09Document4 pagesMi1 Au 2008 09Jacob CarterNo ratings yet
- Zavrsni Ispit S RjesenjimaDocument6 pagesZavrsni Ispit S RjesenjimaAnonymous WkbmWCa8MNo ratings yet
- Prvi Međuispit: A R M PDocument4 pagesPrvi Međuispit: A R M PDario MarjanovićNo ratings yet
- Automatsko UpravljanjeDocument22 pagesAutomatsko UpravljanjeMiladinm1No ratings yet
- Postanak HrvataDocument34 pagesPostanak HrvataJacob CarterNo ratings yet
- AU Predavanje16Document34 pagesAU Predavanje16Jacob CarterNo ratings yet
- AU Predavanje03Document64 pagesAU Predavanje03Jacob CarterNo ratings yet
- AU Predavanje19Document29 pagesAU Predavanje19Jacob CarterNo ratings yet
- AU Predavanje13Document44 pagesAU Predavanje13Jacob CarterNo ratings yet
- AU PredavanDocument53 pagesAU PredavankahvumidragaispeciNo ratings yet
- Marin Drzic - Pjesni RazlikeDocument19 pagesMarin Drzic - Pjesni RazlikeJacob CarterNo ratings yet
- Psihopatologija Za RadoznaleDocument102 pagesPsihopatologija Za RadoznaleAnonymous uJffWRZnNo ratings yet
- Programski Jezik CDocument141 pagesProgramski Jezik CDruštvo pedagoga tehničke kulture SrbijeNo ratings yet
- Vlak U Snijegu Mato LovrakDocument42 pagesVlak U Snijegu Mato Lovrakdamec123489% (9)
- Robert Temple Kristalno SunceDocument400 pagesRobert Temple Kristalno Sunceborkowski22No ratings yet
- Carobnjak MerlinDocument57 pagesCarobnjak MerlinSlobodan GrbićNo ratings yet
- Tarik Kulenovic-Politicki IslamDocument123 pagesTarik Kulenovic-Politicki IslamVeselka BjelakovicNo ratings yet