You might also like
- Pda Mechatro - Handbook 070226Document40 pagesPda Mechatro - Handbook 070226Paul Galvez100% (6)
- Alternator and Regulator: SpecificationsDocument2 pagesAlternator and Regulator: SpecificationsGolbert GolbiNo ratings yet
- This Section Explains The Drive Circuit DesignDocument11 pagesThis Section Explains The Drive Circuit DesignSandeep SNo ratings yet
- Power System Frequency Control MSRMurtyDocument10 pagesPower System Frequency Control MSRMurtyCuong NguyenNo ratings yet
- Automatic Generation Control (AGC)Document22 pagesAutomatic Generation Control (AGC)maan100% (1)
- Gcuu 104Document2 pagesGcuu 104Eli SharmaNo ratings yet
- Sourav Dutta: Dynamic Braking Operation of An Induction Motor Using MatlabDocument4 pagesSourav Dutta: Dynamic Braking Operation of An Induction Motor Using MatlabSourav DuttaNo ratings yet
- LFC Steady State - L4-1Document17 pagesLFC Steady State - L4-1Youssef EzatNo ratings yet
- Q.1 in Case of Grid Supply Fail in KCW Substation. How Can The Restore The Grid in Blackout Condition? SolutionDocument4 pagesQ.1 in Case of Grid Supply Fail in KCW Substation. How Can The Restore The Grid in Blackout Condition? SolutionbbbbbNo ratings yet
- ME-AGS (Lister Petter GS Series Diesel With Remote Start) Rev 11-24-2009Document1 pageME-AGS (Lister Petter GS Series Diesel With Remote Start) Rev 11-24-2009ronaldmasNo ratings yet
- 500-kHz Half-Bridge DC-DC ConverterDocument17 pages500-kHz Half-Bridge DC-DC Converteratkxyz777100% (1)
- Ramgarh Gas Thermal Power Plant, Ramgarh Date . 35.5/37.5 MW Unit Control Room GT 1/2Document10 pagesRamgarh Gas Thermal Power Plant, Ramgarh Date . 35.5/37.5 MW Unit Control Room GT 1/2daiya2daiyaNo ratings yet
- Relay Setting Calculation: M/S Gurugobind Singh Refineery Project: - 2X34.5Mw-GtgsDocument12 pagesRelay Setting Calculation: M/S Gurugobind Singh Refineery Project: - 2X34.5Mw-GtgsAmaresh NayakNo ratings yet
- IEEE Paper On The Wind Access TrubineDocument7 pagesIEEE Paper On The Wind Access TrubineTejeshwiniNo ratings yet
- YSGCU:031 - VER 6.02 (GN) : Generator Controller User ManualDocument10 pagesYSGCU:031 - VER 6.02 (GN) : Generator Controller User ManualRajKumar Patel100% (1)
- 1MRK509042-BEN en Reverse Power Relay and Protection Assemblies RXPPK 2H RAPPKDocument10 pages1MRK509042-BEN en Reverse Power Relay and Protection Assemblies RXPPK 2H RAPPKAparnaa PazhanivelanNo ratings yet
- Sa15b63 EpacDocument1 pageSa15b63 EpacBINOY DASNo ratings yet
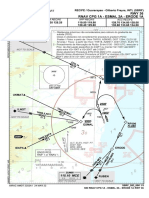
- SBRF - Rnav CPG 1a - Esmal 2a - Erode 1a Rwy 36 - Sid - 20220324Document1 pageSBRF - Rnav CPG 1a - Esmal 2a - Erode 1a Rwy 36 - Sid - 20220324Calebe TavaresNo ratings yet
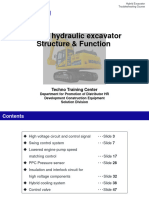
- Hybrid Excavator Structure & FunctionDocument49 pagesHybrid Excavator Structure & Functiontransjakarta0123No ratings yet
- Controle de Deslocamento t1 e t2 de Motores h1b Sauer DanfossDocument12 pagesControle de Deslocamento t1 e t2 de Motores h1b Sauer DanfossWillian Ramon de Miranda CavalcanteNo ratings yet
- Sa15b45 EpacDocument1 pageSa15b45 EpacBINOY DASNo ratings yet
- Data Parameters: Current and Past TMC Engines Covered in This SectionDocument11 pagesData Parameters: Current and Past TMC Engines Covered in This Sectionkywheat3306No ratings yet
- A Brief Idea About Automatic Process Control: Controlling What?Document33 pagesA Brief Idea About Automatic Process Control: Controlling What?Shiva Kotamraju100% (1)
- Generator Protection Settings & Tripping Logics RevalidationDocument19 pagesGenerator Protection Settings & Tripping Logics RevalidationZeeshan SubhaniNo ratings yet
- GRP Relay Setting CalcDocument15 pagesGRP Relay Setting Calcamulya1981100% (1)
- Control PanelDocument9 pagesControl PanelPEMELIHARAAN LISTRIKNo ratings yet
- Module2 Automatic Generation ControlDocument29 pagesModule2 Automatic Generation ControlMichael Zontche Bernard0% (1)
- Amf Relay CatalogDocument2 pagesAmf Relay CatalogShoeb ShaikhNo ratings yet
- Motor Control Unit: 1 Frequency InverterDocument17 pagesMotor Control Unit: 1 Frequency InverterHazim HazimNo ratings yet
- Energy Saving Technologies Based On Power Electronics For Construction & Transportation MachineryDocument36 pagesEnergy Saving Technologies Based On Power Electronics For Construction & Transportation MachineryHerwin LatifanNo ratings yet
- Omogoye .O.S, Ogundare .A.B, Ojo .F.Epage 1Document7 pagesOmogoye .O.S, Ogundare .A.B, Ojo .F.Epage 1kalu chimdiNo ratings yet
- Manual and Remote Start Unit With Key Switch, 72x72 DIN SizeDocument9 pagesManual and Remote Start Unit With Key Switch, 72x72 DIN SizeRaja Bilal LatifNo ratings yet
- Master Checklist Harian Utility BaleDocument1 pageMaster Checklist Harian Utility Balesandy yudhaNo ratings yet
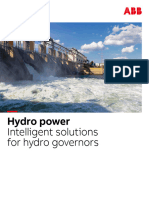
- ABB Hydro Power Brochure 2021Document8 pagesABB Hydro Power Brochure 2021Ammar KhaleelNo ratings yet
- Alternador EspecificacionesDocument2 pagesAlternador EspecificacionesPromesa De IsraelNo ratings yet
- Isolation Product Solution For Motor DriveDocument2 pagesIsolation Product Solution For Motor DriveIvana PrezimeNo ratings yet
- 02 SynchronousDocument150 pages02 Synchronousneela100% (2)
- Siement GCBDocument28 pagesSiement GCBsumpeno enoNo ratings yet
- 2x1450KVA Mitsubishi DG Set With AGC242 Parallel With Grid by AGC246Document7 pages2x1450KVA Mitsubishi DG Set With AGC242 Parallel With Grid by AGC246Rizal HR IDNo ratings yet
- AGC 3&4&200 Serise Single Gen-Set Application With Deif Template 20.12.2012Document26 pagesAGC 3&4&200 Serise Single Gen-Set Application With Deif Template 20.12.2012Dominic DomNo ratings yet
- EG1000Document12 pagesEG1000alizanelectronicNo ratings yet
- Lab #6 - Closed Loop Position ControlDocument4 pagesLab #6 - Closed Loop Position ControlChristy CheriyanNo ratings yet
- Module2 Automatic Generation ControlDocument29 pagesModule2 Automatic Generation ControlADDIS JOHNNo ratings yet
- Charging PDFDocument16 pagesCharging PDFred eagle winsNo ratings yet
- System: Lectrical of EngineDocument12 pagesSystem: Lectrical of Enginedonnieee77No ratings yet
- Excitation System of Generator: Presented By: Niaz Akhtar Gte-ElectDocument40 pagesExcitation System of Generator: Presented By: Niaz Akhtar Gte-Electrk250No ratings yet
- ACCL Current RatingDocument4 pagesACCL Current RatingyesukannanNo ratings yet
- KG934V1 Page 25-30Document6 pagesKG934V1 Page 25-30Niten GuptaNo ratings yet
- DTC P0045/34 Turbo/Super Charger Boost Control Solenoid Circuit / OpenDocument4 pagesDTC P0045/34 Turbo/Super Charger Boost Control Solenoid Circuit / OpenYani Yani0% (1)
- GD300 Manual EnglishDocument298 pagesGD300 Manual Englishnhu@nhuNo ratings yet
- Generator Protection: Presented by D G Pattanayak Dy MGR (Electrical) Operation DeptDocument36 pagesGenerator Protection: Presented by D G Pattanayak Dy MGR (Electrical) Operation DeptDUVASU UPNo ratings yet
- Sop DGDocument5 pagesSop DGjp mishraNo ratings yet
- (2-1) ABB Xekaman 3 Governor System Retrofitting Solution Drawing (2020-8)Document3 pages(2-1) ABB Xekaman 3 Governor System Retrofitting Solution Drawing (2020-8)Nguyen Duc Nha100% (1)
- Electrical RabeaDocument22 pagesElectrical Rabeaاسعد الماوريNo ratings yet
- Vta 28Document17 pagesVta 28julian ienNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- CE QuantizerDocument4 pagesCE QuantizerAnjishnuNo ratings yet
- CE CompandingDocument3 pagesCE CompandingAnjishnuNo ratings yet
- CE Notes On NOISEDocument9 pagesCE Notes On NOISEAnjishnuNo ratings yet
- CE - Pulse Width and Pulse PositionDocument6 pagesCE - Pulse Width and Pulse PositionAnjishnuNo ratings yet
- CE - Pulse ModulationDocument5 pagesCE - Pulse ModulationAnjishnuNo ratings yet
- CE - AM Wave DemodulationDocument5 pagesCE - AM Wave DemodulationAnjishnuNo ratings yet
- Finalproject PDFDocument9 pagesFinalproject PDFAnjishnuNo ratings yet
- Cut Set EtcDocument40 pagesCut Set Etcpalashkatiyar1234No ratings yet
- New Doc 2019-11-22 13.24.31Document37 pagesNew Doc 2019-11-22 13.24.31AnjishnuNo ratings yet
- Course Structure of BE Electrical Engineering BranchDocument56 pagesCourse Structure of BE Electrical Engineering BranchAnjishnu MahantaNo ratings yet
- MIT18 703S13 Pra L 5Document6 pagesMIT18 703S13 Pra L 5raw.junkNo ratings yet
- New Doc 2019-11-20 12.15.49Document19 pagesNew Doc 2019-11-20 12.15.49AnjishnuNo ratings yet
- SubgroupsDocument5 pagesSubgroupsfr0st003No ratings yet
- MIT18 703S13 Pra L 4Document10 pagesMIT18 703S13 Pra L 4raw.junkNo ratings yet
- MIT18 703S13 Pra L 19Document9 pagesMIT18 703S13 Pra L 19raw.junkNo ratings yet
- Groups PDFDocument8 pagesGroups PDFudaynotrajNo ratings yet
- MIT18 703S13 Pra L 21Document11 pagesMIT18 703S13 Pra L 21raw.junkNo ratings yet
- CosetsDocument7 pagesCosetsHimraj BachooNo ratings yet
- MIT18 703S13 Pra L 20Document5 pagesMIT18 703S13 Pra L 20Lionel CarlosNo ratings yet
- MIT18 703S13 Pra L 23Document7 pagesMIT18 703S13 Pra L 23Papadakis ChristosNo ratings yet
- Mit Ocw: 18.703 Modern Algebra Prof. James MckernanDocument10 pagesMit Ocw: 18.703 Modern Algebra Prof. James Mckernanraw.junkNo ratings yet
- MIT18 703S13 Pra L 13Document6 pagesMIT18 703S13 Pra L 13raw.junkNo ratings yet
- Mit Ocw: 18.703 Modern Algebra Prof. James MckernanDocument4 pagesMit Ocw: 18.703 Modern Algebra Prof. James Mckernanraw.junkNo ratings yet
- Mit Ocw: 18.703 Modern Algebra Prof. James MckernanDocument3 pagesMit Ocw: 18.703 Modern Algebra Prof. James Mckernanraw.junkNo ratings yet
- MIT18 703S13 Pra L 12Document8 pagesMIT18 703S13 Pra L 12raw.junkNo ratings yet
- MIT18 703S13 Pra L 15Document5 pagesMIT18 703S13 Pra L 15raw.junkNo ratings yet
- Mit Ocw: 18.703 Modern Algebra Prof. James MckernanDocument6 pagesMit Ocw: 18.703 Modern Algebra Prof. James Mckernanraw.junkNo ratings yet
- List of Famous Cities On River Banks in The WorldDocument2 pagesList of Famous Cities On River Banks in The WorldDiptangshu DeNo ratings yet
- I - Pronunciation Choose The Word Whose Stress Pattern Is Different From The Other Three in The Following QuestionsDocument6 pagesI - Pronunciation Choose The Word Whose Stress Pattern Is Different From The Other Three in The Following QuestionsHaNo ratings yet
- Norma Geral Astm Bronze Alumínio - b150b150m.19198Document7 pagesNorma Geral Astm Bronze Alumínio - b150b150m.19198EduardoNo ratings yet
- Rotc Reviewer FinalsDocument11 pagesRotc Reviewer FinalsAngel Atienza100% (1)
- Applied Computational AerodynamicsDocument15 pagesApplied Computational AerodynamicsjoereisNo ratings yet
- Delegate List - 10th IMRC With Contact Details - Removed (1) - Removed (1) - Removed (1) - RemovedDocument100 pagesDelegate List - 10th IMRC With Contact Details - Removed (1) - Removed (1) - Removed (1) - RemovedSharon SusmithaNo ratings yet
- SalerioDocument28 pagesSalerioRizqaFebrilianyNo ratings yet
- 064 DIR - Launching Whipping Creme & Skimmed Milk Di Channel Horeka (Subdist Masuya)Document3 pages064 DIR - Launching Whipping Creme & Skimmed Milk Di Channel Horeka (Subdist Masuya)indra sapta PrahardikaNo ratings yet
- Munchies BrochureDocument28 pagesMunchies BrochureIbrahim Diaz LazoNo ratings yet
- El Nino 3Document8 pagesEl Nino 3nisAfiqahNo ratings yet
- Day 1 Training Material FlowDocument200 pagesDay 1 Training Material FlowGhazouani AymenNo ratings yet
- Cross System Create Supplier ProcessDocument14 pagesCross System Create Supplier ProcesssakthiroboticNo ratings yet
- Sample Spec For AWWA HDPE Pipe Fittings 6.02revDocument6 pagesSample Spec For AWWA HDPE Pipe Fittings 6.02revmg4myNo ratings yet
- Lecture 08Document32 pagesLecture 08SusovanNo ratings yet
- About TableauDocument22 pagesAbout TableauTarun Sharma67% (3)
- A Dessertation Report Submitted in Partial Fulfillment of Requirements For The Award of The Degree ofDocument65 pagesA Dessertation Report Submitted in Partial Fulfillment of Requirements For The Award of The Degree ofMadhavpokale100% (1)
- 2019q123.ev3-Descon Engro Level Gauges-QDocument7 pages2019q123.ev3-Descon Engro Level Gauges-Qengr_umer_01No ratings yet
- 95 935 Dowsil Acp 3990 Antifoam CompDocument2 pages95 935 Dowsil Acp 3990 Antifoam CompZhan FangNo ratings yet
- GENUS Clock Gating Timing CheckDocument17 pagesGENUS Clock Gating Timing Checkwasimhassan100% (1)
- Construction of Perimeter Fence of BFP NHQ PDFDocument133 pagesConstruction of Perimeter Fence of BFP NHQ PDFYalla ChaitanyaNo ratings yet
- PLX Model OfficialDocument105 pagesPLX Model OfficialBảo Ngọc LêNo ratings yet
- Esp Kelompok 2Document19 pagesEsp Kelompok 2Taufiq DiNo ratings yet
- Professional Development Objectives Related To Modalities Specific TopicsDocument3 pagesProfessional Development Objectives Related To Modalities Specific TopicsCris100% (1)
- Easy NoFap EbookDocument37 pagesEasy NoFap Ebookசரஸ்வதி சுவாமிநாதன்No ratings yet
- Maryam Ejaz Sec-A Marketing Assignment (CHP #15)Document3 pagesMaryam Ejaz Sec-A Marketing Assignment (CHP #15)MaryamNo ratings yet
- Advanced Packaging Polymers: Product Selection GuideDocument12 pagesAdvanced Packaging Polymers: Product Selection GuideDKNo ratings yet
- Luyện nghe Tiếng Anh có đáp án: I/ Listen and complete the textDocument3 pagesLuyện nghe Tiếng Anh có đáp án: I/ Listen and complete the textVN LenaNo ratings yet
- Gel Electrophoresis Worksheet Teacher AnswersDocument3 pagesGel Electrophoresis Worksheet Teacher AnswersChris FalokunNo ratings yet
- Supermini200 (Hi-Res Book) Brochure en Ver1 00Document4 pagesSupermini200 (Hi-Res Book) Brochure en Ver1 00PauloValdiviesoNo ratings yet
- Preliminary Voters ListDocument86 pagesPreliminary Voters Listمحمد منيب عبادNo ratings yet