You might also like
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- Equation SheetDocument2 pagesEquation SheetStevenNo ratings yet
- HE Lecture 5 PDFDocument13 pagesHE Lecture 5 PDFpresidentisc nit-rourkelaNo ratings yet
- 2021 PH101 Lecture03Document17 pages2021 PH101 Lecture03Vivek ParleyNo ratings yet
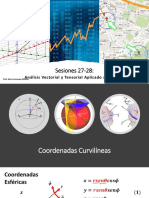
- Coordinate Systems: ContinueDocument18 pagesCoordinate Systems: ContinueVaijantiNo ratings yet
- Dynamics: Introduction To Dynamics Kinematics of A ParticleDocument55 pagesDynamics: Introduction To Dynamics Kinematics of A ParticleThe VitalityNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument1 pageHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- PhysiqueDocument3 pagesPhysiqueErone DougassaNo ratings yet
- SPP positioning with pseudorangesDocument2 pagesSPP positioning with pseudorangesFelix JaimesNo ratings yet
- 3 Relative MotionDocument6 pages3 Relative MotionHassan FulaihNo ratings yet
- AM-4 FinalDocument45 pagesAM-4 FinalChandan KumarNo ratings yet
- CH 1 Lecture 1Document12 pagesCH 1 Lecture 1Yahya Khan, BS Student Dept. of Physics, UoPNo ratings yet
- Rohini 93493285136Document7 pagesRohini 93493285136Kavi SanjaiNo ratings yet
- Grade 12 Mathematics: Advanced StreamDocument28 pagesGrade 12 Mathematics: Advanced Streammanal alsaadiNo ratings yet
- HE Lecture 4 PDFDocument12 pagesHE Lecture 4 PDFpresidentisc nit-rourkelaNo ratings yet
- Orbital Mechanics Cheat SheetDocument3 pagesOrbital Mechanics Cheat SheetRodolfo SotoNo ratings yet
- Coordinate system conversions between Cartesian, cylindrical and sphericalDocument20 pagesCoordinate system conversions between Cartesian, cylindrical and sphericalAulia WidyaNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument10 pagesHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- 10 Waveguides GeneralApproach PDFDocument28 pages10 Waveguides GeneralApproach PDFKOTTI NIKHITHANo ratings yet
- 10 Waveguides GeneralApproachDocument28 pages10 Waveguides GeneralApproachRounak MandalNo ratings yet
- Online Class 1 23.01.22Document17 pagesOnline Class 1 23.01.22Abdul QuddusNo ratings yet
- Vector Calculus-Lec-1 & 2Document41 pagesVector Calculus-Lec-1 & 2Subhan MansoorNo ratings yet
- EE 326 Control Systems Modeling in the Frequency DomainDocument28 pagesEE 326 Control Systems Modeling in the Frequency DomainMüge ERDOĞANNo ratings yet
- Physical Constants: Handbook: Electromagnetic WaveDocument5 pagesPhysical Constants: Handbook: Electromagnetic WavedeevNo ratings yet
- BL Session 03Document5 pagesBL Session 03shanoon77No ratings yet
- CINEMÁTICA DEL CUERPO RÍGIDO U2 HibDocument47 pagesCINEMÁTICA DEL CUERPO RÍGIDO U2 HibAyrton OchoaNo ratings yet
- Robot Kinematics MatrixDocument41 pagesRobot Kinematics MatrixSameNo ratings yet
- Steady state error and control system conceptsDocument4 pagesSteady state error and control system conceptsAhmed KhaledNo ratings yet
- PHYS 101 - General Physics I Final Exam Solution (17.05.2022)Document5 pagesPHYS 101 - General Physics I Final Exam Solution (17.05.2022)Tuğba AydemirNo ratings yet
- Normal and Shear Stresses On Inclined PlainDocument2 pagesNormal and Shear Stresses On Inclined PlainPushkar MishraNo ratings yet
- Rate Limiting StepDocument4 pagesRate Limiting Stepanak tengikNo ratings yet
- IM BrakingDocument10 pagesIM BrakingABCNo ratings yet
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- Lecture No 19Document7 pagesLecture No 19GGCTTS BooksNo ratings yet
- First Order Circuits - RC and RLDocument22 pagesFirst Order Circuits - RC and RLTyspoNo ratings yet
- Math ExamDocument9 pagesMath ExamMalik AsadNo ratings yet
- VECTOR ANALYSIS FUNDAMENTALSDocument24 pagesVECTOR ANALYSIS FUNDAMENTALSUtsav PathakNo ratings yet
- 3 Curl of A Vector, Stoke's Theorem, and Laplacian of A ScalarDocument50 pages3 Curl of A Vector, Stoke's Theorem, and Laplacian of A ScalarMarc Rivera100% (1)
- شيت القوانينDocument2 pagesشيت القوانينRuqaya MohammedNo ratings yet
- Robotics Course: LR02.2: 3 Dimensional Rotation and TranslationDocument36 pagesRobotics Course: LR02.2: 3 Dimensional Rotation and TranslationThiha Ye ThwayNo ratings yet
- Exercice moufid: Finding the roots and properties of a complex polynomialDocument2 pagesExercice moufid: Finding the roots and properties of a complex polynomialTEST - TESTNo ratings yet
- 1819 Formula Sheet 1 (Chemical Equilibria) (EN)Document2 pages1819 Formula Sheet 1 (Chemical Equilibria) (EN)Nathasha MncubeNo ratings yet
- قوانينDocument1 pageقوانينMajd OsamaNo ratings yet
- Solutions of Tutorial4Document30 pagesSolutions of Tutorial4Aditay RanaNo ratings yet
- Summary of RulesDocument3 pagesSummary of Ruleshalharbi0568No ratings yet
- Laminar Flow Equation in a Cylindrical AnnulusDocument4 pagesLaminar Flow Equation in a Cylindrical AnnulusShodmon TolibovNo ratings yet
- Lesson 7 Gear TrainsDocument30 pagesLesson 7 Gear TrainsKristine PanlilioNo ratings yet
- Ch07 Kinematics Umair Sabi UllahDocument15 pagesCh07 Kinematics Umair Sabi UllahMisbah SulemanNo ratings yet
- ch07 Kinematics Umair Sabi Ullah PDFDocument15 pagesch07 Kinematics Umair Sabi Ullah PDFfarwa mughalNo ratings yet
- Analytical Solutions For Velocity Analysis: A BA BDocument1 pageAnalytical Solutions For Velocity Analysis: A BA BKhuzifa AfridiNo ratings yet
- Lectures 3+4Document15 pagesLectures 3+4JamilNo ratings yet
- 3.2 Monochromatic Plane WavesDocument3 pages3.2 Monochromatic Plane Wavesmuhammadnaeem4957No ratings yet
- 07-CH4-Sec 4 1-4 3Document38 pages07-CH4-Sec 4 1-4 3MimiNo ratings yet
- Presentation On Derivation of Navier Stokes EquationsDocument17 pagesPresentation On Derivation of Navier Stokes Equationsabubakari meregulwaNo ratings yet
- MVC Week 3 LectureDocument7 pagesMVC Week 3 Lectureamarah0005No ratings yet
- TRIGONOMETRIC FUNCTIONS SOLUTIONSDocument22 pagesTRIGONOMETRIC FUNCTIONS SOLUTIONSparamNo ratings yet
- Understanding rotation matrices and coordinate frame transformationsDocument58 pagesUnderstanding rotation matrices and coordinate frame transformationsagfjtrsNo ratings yet
- ST SP Sheet 1 SolnDocument11 pagesST SP Sheet 1 SolnBfhf HdhgNo ratings yet
- HS 151 2021 - Cities Syllabus For CiruclaitonDocument3 pagesHS 151 2021 - Cities Syllabus For CiruclaitonAdvaith Krishna ANo ratings yet
- Swot&pestelDocument2 pagesSwot&pestelAdvaith Krishna ANo ratings yet
- Xenobots: Now Live!Document5 pagesXenobots: Now Live!Advaith Krishna ANo ratings yet
- Gradient AscentDocument27 pagesGradient AscentAdvaith Krishna ANo ratings yet
- Time Value of MoneyDocument1 pageTime Value of MoneyAdvaith Krishna ANo ratings yet
- Cation Intercalation in Layered Anionic Frameworks, Cationic Ligands and Assembling of Complex IonsDocument11 pagesCation Intercalation in Layered Anionic Frameworks, Cationic Ligands and Assembling of Complex IonsAdvaith Krishna ANo ratings yet
- Mañanita Songs Mañanita SongsDocument2 pagesMañanita Songs Mañanita SongsSanchez Bayan100% (1)
- Managed Pressure Drilling MPD BrochureDocument5 pagesManaged Pressure Drilling MPD Brochureswaala4realNo ratings yet
- 5 Variable K-MapDocument15 pages5 Variable K-MapBen SewellNo ratings yet
- Physics Formulas and Symbols: Physics I Symbol FormulaDocument5 pagesPhysics Formulas and Symbols: Physics I Symbol Formulakaparthy100% (9)
- IAL Edexcel Pure Math 1 January 2020Document28 pagesIAL Edexcel Pure Math 1 January 2020Mohamed Said Daw100% (4)
- Parapsychology QP - WikiDocument371 pagesParapsychology QP - WikiAdamNo ratings yet
- Essotherm 500 PDFDocument8 pagesEssotherm 500 PDFdonyaNo ratings yet
- MidtermDocument3 pagesMidtermTrisha MondonedoNo ratings yet
- Barney's Great Adventure - Barney Wiki - WikiaDocument2 pagesBarney's Great Adventure - Barney Wiki - WikiachefchadsmithNo ratings yet
- Practice Quiz M1 (Ungraded) - MergedDocument22 pagesPractice Quiz M1 (Ungraded) - MergedAbdullah Abdullah100% (1)
- Creation Story From LuzonDocument4 pagesCreation Story From LuzonMartin SantelicesNo ratings yet
- Tejas: Practice Sheet JEE PhysicsDocument3 pagesTejas: Practice Sheet JEE PhysicsAshree KesarwaniNo ratings yet
- Flacs CFD ManualDocument658 pagesFlacs CFD ManualCyanNo ratings yet
- Erotic MassageDocument113 pagesErotic MassageMahmoud El Mohamdy75% (4)
- Confined Space Entry: OSHA Standard 1910.146Document38 pagesConfined Space Entry: OSHA Standard 1910.146SKH CultureNo ratings yet
- Random Variate Generation-1Document21 pagesRandom Variate Generation-1Christian Delas AlasNo ratings yet
- GLOBAL GAME AFK IN THE ZOMBIE APOCALYPSE GAME Chapter 201-250Document201 pagesGLOBAL GAME AFK IN THE ZOMBIE APOCALYPSE GAME Chapter 201-250ganesh sarikondaNo ratings yet
- Pip Venix LRDocument2 pagesPip Venix LRThanh VoNo ratings yet
- Memorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North CarolinaDocument7 pagesMemorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North Carolinaestela maria dulaganNo ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
- Jigoku Shoujo Eikyuu No SonzaiDocument166 pagesJigoku Shoujo Eikyuu No Sonzaiapi-224188021No ratings yet
- Ship Construction: Second Mates - HANDOUTDocument117 pagesShip Construction: Second Mates - HANDOUTmaneeshNo ratings yet
- Understanding of AVO and Its Use in InterpretationDocument35 pagesUnderstanding of AVO and Its Use in Interpretationbrian_schulte_esp803100% (1)
- Encapsulation and Inheritance in Object-Orlented Programming LanguagesDocument8 pagesEncapsulation and Inheritance in Object-Orlented Programming Languageszsolt kormanyNo ratings yet
- Pharmaceutical Ingredients and Excipient - LastpptDocument72 pagesPharmaceutical Ingredients and Excipient - LastpptFANTANo ratings yet
- STP1236 Eb.1415051 1 PDFDocument208 pagesSTP1236 Eb.1415051 1 PDFpaolaNo ratings yet
- Sampling and Field Testing at Wastewater Treatment FacilitiesDocument11 pagesSampling and Field Testing at Wastewater Treatment FacilitiesSundarapandiyan SundaramoorthyNo ratings yet
- Erasmus Rotterdam University MCDocument24 pagesErasmus Rotterdam University MCAndreea CroitoruNo ratings yet
- Differential Equations CookbookDocument2 pagesDifferential Equations CookbookAugustinZNo ratings yet