Professional Documents
Culture Documents
Issue February-April: 69 - 4-18.indd 1 4/15/12 11:30 PM
Uploaded by
kiatisak07102537Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Issue February-April: 69 - 4-18.indd 1 4/15/12 11:30 PM
Uploaded by
kiatisak07102537Copyright:
Available Formats
ไ ฟ ฟ้ า แ ล ะ เ ค รื่ อ ง ก ล
ผ ศ . ถ า ว ร อ ม ต กิ ต ติ์
คณะวิศวกรรมศาสตร์ มหาวิทยาลัยศรีปทุม
การใช้งานและการบำ�รุงรักษา
ความเข้าใจในพื้นฐานและคุณสมบัติของมอเตอร์ จะช่วยให้นำ�มอเตอร์มาใช้งานได้อย่างเกิด
ประโยชน์สูงสุดและเต็มสมรรถนะ รวมทั้งทำ�ให้มีประสิทธิภาพในการบำ�รุงรักษาอีกด้วย
การรู้ พื้ น ฐานของมอเตอร์ ทำ � ให้ ก ารเลื อ กมอเตอร์ ม าใช้ ง านและการบำ � รุ ง รั ก ษา
มอเตอร์มีประสิทธิภาพ ซึ่งเป็นการช่วยยกระดับการผลิต ลดช่วงหยุดทำ�งานโดยบังเอิญ
และประหยัดเงินได้จำ�นวนมาก
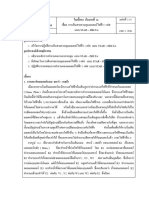
พื้นฐานเกี่ยวกับมอเตอร์ รูปที่ 1 ซึ่งนำ�มาใช้งานได้แตกต่างกันตาม ● มอเตอร์แบบอี (E) เป็นมอเตอร์
พื้นฐานเกี่ยวกับมอเตอร์ มีรายละเอียด ตารางที่ 1 โดยมีรายละเอียดดังนี้ ประสิทธิภาพสูง ซึ่งมีแรงบิดขณะยึดโรเตอร์
ต่างๆ จำ�นวนมาก เช่น ขนาดกระแส, แบบ ● มอเตอร์แบบเอ (A) เป็นมอเตอร์ที่ ต่ำ�กว่ามอเตอร์แบบบี แต่การปรับปรุงระบบ
และชนิด, ประสิทธิภาพ, โหลด, ความเร็ว, ใช้ในงานหล่อแบบฉีด ซึ่งมีแรงบิดดึงออกสูง ที่ ใ ช้ ม อเตอร์ แ บบบี ก็ ยั ง เป็ น ทางเลื อ กที่ น่ า
แรงบิด เป็นต้น ● มอเตอร์แบบบี (B) เป็นมอเตอร์ที่ สนใจอยู่
1. ขนาดกระแสของมอเตอร์ ใช้ในงานอุตสาหกรรมทั่วไป ซึ่งมีแรงบิดเริ่ม
ขนาดกระแส (Amperage) ทีใ่ ช้ในมอเตอร์ เดินเหมาะสมและมีกระแสเริ่มเดินไม่สูงนัก
มี 3 ชนิดคือ ● มอเตอร์แบบซี (C) เป็นมอเตอร์ที่
1. กระแสโหลดเต็ม (Full load amp) ใช้ในงานหนักขณะเริ่มเดิน โดยมีแรงบิดเริ่ม
คือค่ากระแสไฟฟ้าบนเนมเพลต ซึ่งเป็นกระ เดินสูง
แสไฟฟ้าในภาวะโหลดเต็มหรือแรงบิดเต็ม ● มอเตอร์แบบดี (D) เป็นมอเตอร์ที่มี
2. กระแสขณะยึดโรเตอร์ (Locked rotor สลิปสูงโดยมีแรงบิดเริ่มเดินสูง ซึ่งเหมาะกับ
amp) คือกระแสกระชากขณะสตาร์ต ซึ่งเป็น ลิฟต์ความเร็วต่�ำ , รอกยกของ และเครื่อง
รูปที่ 1 เส้นโค้งความเร็ว-แรงบิดของมอเตอร์
กระแสไฟฟ้ า ภาวะสตาร์ ต เมื่ อ จ่ า ยแรงดั น เจาะกระแทก แบบต่างๆ
ไฟฟ้าเต็ม
3. กระแสตัวประกอบบริการ (Service แบบ กระแส แรงบิด ตารางที ่ 1 แบบของมอเตอร์และการใช้งาน
แรงบิด สลิป
factor amp) คือกระแสโหลดเกินของมอเตอร์ เริ่มเดิน ขณะยึด สุดกำ�ลัง การใช้งาน
โรเตอร์
ที่คิดเป็นเปอร์เซนต์เท่ากับตัวประกอบบริการ A สูง กลาง สูง ≤ 5% โหลดเร็วคงที่ : พัดลม, เครื่องเป่าลม, ปั๊มโรตารี่,
บนเนมเพลต เช่น มอเตอร์มีตัวประกอบ คอมเพรสเซอร์ไม่มีโหลด, เครื่องจักร
บริการ 1.15 แสดงว่าสามารถรับโหลดเกิน B กลาง กลาง สู ง ≤ 5% โหลดเร็วคงที่ : พัดลม, เครื่องเป่าลม, ปั๊มโรตารี่,
คอมเพรสเซอร์ไม่มีโหลด, เครื่องจักรกล
ได้ 15% C กลาง สูง กลาง ≤ 5% โหลดเร็วคงที่, เริ่มเดินเฉื่อยสูง (เครื่องเป่าลมเหวี่ยงหนีศูนย์กลาง, ล้อ
2. มอเตอร์แบบต่างๆ หมุน), เริ่มเดินมีโหลด (ปั๊มลูกสูบ, คอมเพรสเซอร์,สายพานลำ�เลียง)
D กลาง สูงพิเศษ ต่ำ� 5-13% เริ่มเดินมีโหลด, เฉื่อยสูงมาก, ความเร็วเปลี่ยน (เครื่องจักร
แบบของมอเตอร์ (Design letter) แสดง ขึ้นรูป, เครน, รอก, ลิฟต์)
ถึงรูปร่างของเส้นโค้งความเร็ว-แรงบิดตาม E กลาง-สูง กลาง-สูง กลาง-สูง 75% ปั๊ม, พัดลม, เครื่องเป่าลม
ISSUE4/18FEBRUARY-APRIL2012
69
69-�����������������4-18.indd 1 4/15/12 11:30 PM
กล
ไฟ
ฟ้ ง
าแล
ะ เ ค รื่ อ
3. ประสิทธิภาพและโหลด 4. ขั้ว 7. อุณหภูมิ
ประสิ ท ธิ ภ าพคื อ เปอร์ เ ซ็ น ต์ ข องกำ � ลั ง ขัว้ มอเตอร์หมายถึงขัว้ แม่เหล็ก (ขัว้ เหนือ ความร้อนเป็นปัจจัยแรกที่ทำ�ให้มอเตอร์
ด้านเข้าที่มอเตอร์เปลี่ยนเป็นงานด้านออก และขั้วใต้) เมื่อจ่ายไฟฟ้าเข้ามอเตอร์ ความ ล้มเหลว ซึ่ง 70% ของมอเตอร์ที่ล้มเหลวเกิด
โดยปกติจะมีค่าประสิทธิภาพอยู่บนเนมเพลต เร็วซิงโครนัสของมอเตอร์ไฟฟ้ากระแสสลับ จากความร้อนสูงเกิน การพิจารณาอุณหภูมิ
มอเตอร์ที่มีขนาดโครง (Frame size) ใหญ่ จะมีจำ�นวนขั้วสัมพันธ์กับความถี ่ ตารางที่ 2 มอเตอร์มีตัวประกอบ 2 ประการคือ
จะมีแรงม้าสูงหรือความเร็วต่� ำ ซึ่งขนาดโครง แสดงความเร็วซิงโครนัสตามขั้วมอเตอร์ที่ 1. อุณหภูมแิ วดล้อม คืออุณหภูมหิ อ้ งสูง
มาตรฐานจะระบุถึงแรงม้า, ความเร็ว และ ความถี่ 50 และ 60 ไซเกิล สุดที่มอเตอร์ทำ�งานต่อเนื่องที่ภาวะโหลดเต็ม
เปลือกหุ้ม ตารางที่ 2 ความเร็วซิงโครนัส ได้อย่างปลอดภัย โดยส่วนใหญ่พิกัดอุณหภูมิ
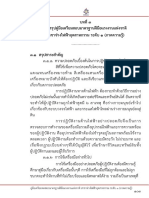
ชั้นแรงดันของฉนวน (Insulation class) ตามขั้วของมอเตอร์ แวดล้อมคือ 40 ํC
จำ�นวนขั้ว ความเร็วซิงโครนัส
แสดงถึงความต้านทานของฉนวนที่ทนความ 60 ไซเกิล 50 ไซเกิล 2. อุณหภูมิเพิ่ม คือ อุณหภูมิภายใน
ร้อนได้ ชั้นแรงดันของฉนวนที่ทนอุณหภูมิได้ 2 3,600 3,000 ขดลวดทีเ่ ปลีย่ นไปจากภาวะไม่ท�ำ งานถึงภาวะ
4 1,800 1,500
จากน้อยไปมากตามรูปที่ 2 มีสี่ประเภทคือ 6 1,200 1,000 โหลดเต็มต่อเนื่องพิกัดเวลา (Time rating) คือ
A, B, F และ H 8 900 750 พิกัดที่มอเตอร์สามารถทำ�งานได้ต่อเนื่องที่
10 720 600
ภาวะแรงบิดโหลดเต็มโดยไม่เกิดความร้อน
5. ตัวประกอบบริการ สูงเกิน
ตัวประกอบบริการคือ ตัวคูณที่แสดง 8. แรงบิด
ปริ ม าณโหลดเกิ น ที่ ม อเตอร์ ส ามารถรั บ ได้ แรงบิดคือแรงหมุนที่เกิดจากเพลาของ
เช่น มอเตอร์ที่มีตัวประกอบบริการเป็น 1.0 มอเตอร์ หน่วยของแรงบิดเป็นเมตรกิโลกรัม
จะไม่สามารถรับโหลดต่อเนื่องได้เกินกว่าแรง หรือฟุตปอนด์ รูปที่ 4 แสดงแรงบิดชนิดต่างๆ
ม้าบนเนมเพลต แต่มอเตอร์ที่มีตัวประกอบ
รูปที่ 2 ระดับชั้นแรงดันของฉนวน บริการเป็น 1.15 จะสามารถรับโหลดเป็น
พักๆ ได้สูงจากแรงม้าบนเนมเพลตถึง 15%
ความสำ�คัญมากที่สุดของการนำ�มอเตอร์ 6. ความเร็วสลิปและความเร็ว
มาใช้งานคือ มอเตอร์สอดคล้องกับชนิดของ ซิงโครนัส
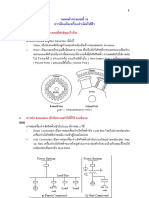
โหลด ซึ่งชนิดของโหลดตามรูปที่ 3 มีดังนี้ ความเร็วสลิปคือความแตกต่างระหว่าง
ความเร็วซิงโครนัสของมอเตอร์กับความเร็ว
โหลดเต็ ม โดยแสดงเป็ น
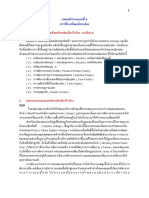
รูปที่ 4 เส้นโค้งความเร็ว-แรงบิดโดยทั่วไป
เปอร์ เ ซ็ น ต์ ข องความเร็ ว ซิ ง
โครนัส โดยปกติแล้วมอเตอร์ ● แรงบิดโหลดเต็ม (Full load torque)
ทั่ ว ไปจะเดิ น เครื่ อ งด้ ว ย คือแรงบิดต่อเนื่องตามพิกัดที่มอเตอร์ทำ�งาน
รูปที่ 3 ชนิดของโหลดสำ�หรับมอเตอร์ : โหลดแรงม้าคงที่ (ซ้าย), สลิ ป โหลดเต็ ม อยู่ ใ นช่ ว ง ได้โดยไม่เกิดความร้อนสูงเกินภายในพิกัด
โหลดแรงบิดคงที่ (กลาง), โหลดแรงบิดแปรค่าได้ (ขวา)
2% ถึง 5% ความเร็วซิงโครนัส เวลา
● โหลดแรงม้าคงที่ (Constant horse- คือ ความเร็วของสนามแม่เหล็กภายในมอเตอร์ ● แรงบิดค่ายอด (Peak torque) โหลด
power) คือโหลดคงที่ที่ต้องการแรงบิดต่�ำ ลง ที่กำ�ลังหมุน ซึ่งใกล้เคียงกับความเร็วมอเตอร์ จำ�นวนมากต้องการแรงบิดเปลี่ยนแปลงตาม
เมื่อความเร็วเพิ่มขึ้น ภาวะไม่มีโหลด เช่น มอเตอร์ 4 ขั้วที่ 50 ไซเกิล เครื่องจักร ซึ่งความต้องการแรงบิดสูงสุดที่
● โหลดแรงบิดคงที่ (Constant torque) มีความเร็วของสนามแม่เหล็กเป็น 1,500 รอบ จุดใดๆ คือ “ความต้องการแรงบิดค่ายอด”
คือโหลดที่ต้องการแรงบิดคงที่เพื่อขับโหลด ต่อนาทีตามตารางที่ 2 ส่วนความเร็วของ ● แรงบิ ด ดึ ง ออกหรื อ แรงบิ ด สุ ด กำ � ลั ง
โดยไม่คำ�นึงถึงความเร็ว เพลามอเตอร์ที่ภาวะไม่มีโหลดจะใกล้เคียง (Pull out torque, Breakdown torque) คือ
● โหลดแรงบิดแปรค่าได้ (Variable กับ 1,500 รอบต่อนาที เช่น 1,498 รอบต่อนาที แรงบิดสูงสุดที่ได้เมื่อมอเตอร์ท�ำ งานที่แรงดัน
torque) คือโหลดที่ต้องการแรงบิดสูงขึ้นเมื่อ ซึ่ ง ความแตกต่ า งระหว่ า งความเร็ ว ซิ ง โคร ไฟฟ้าเต็มและความเร็วเต็ม
ความเร็วสูงขึ้น นัสกับความเร็วโหลดเต็มคือความเร็วสลิป ● แรงบิดดึงขึ้น (Pull up torque) คือ
70 ISSUE4/18FEBRUARY-APRIL2012
69-�����������������4-18.indd 2 4/15/12 11:30 PM
กล
ไฟ
ฟ้ ง
าแล
ะ เ ค รื่ อ
จุ ด ต่ำ� สุด บนเส้นโค้งความเร็ว-แรงบิดของ ยังมีอปุ กรณ์อน่ื อีกด้วย เช่น เซอร์กติ เบรกเกอร์ ปลายสายให้กับระบบเดินสายที่ต้องการได้
มอเตอร์ที่เร่งสู่ความเร็วเต็ม การออกแบบ ของสายป้อนวงจรย่อย, หม้อแปลงย่อย, แผง ดังนี้
มอเตอร์ในบางครั้งจะไม่คำ�นึงถึงค่าแรงบิด ไฟฟ้า, ชุดขับและตัวควบคุมแบบโปรแกรม ● ประเภท 1 เป็นการจัดกลุ่มทางกล
ดึงขึ้น เนื่องจากจุดต่�ำ สุดบนเส้นโค้งความเร็ว ได้ รวมทั้งการวัดและการเฝ้าตรวจไฟฟ้า โดยจั ด รู ป แบบชุ ด ควบคุ ม มอเตอร์ ร วมกั น
● แรงบิดอาจเกิดขึ้นที่จุดโรเตอร์ถูกยึด อุปกรณ์ข้างต้นที่ใช้ใน MCC จะมี MCC ประเภทนี้หลายชุดจะต่อกับบัสไฟฟ้า
(แรงบิดดึงขึ้นเท่ากับแรงบิดขณะยึดโรเตอร์) ลักษณะเป็นโมดูลลาร์ตามรูปที่ 6 ซึ่งโดย ร่วมโดยทำ�งานอิสระต่อกัน และไม่มีการเดิน
● แรงบิ ด เริ่ ม เดิ น หรื อ แรงบิ ด ขณะยึ ด ทั่วไปจะกว้างประมาณ 40 ซม. และมีความ สายภายในระหว่างชุด MCC หรือไม่มี
โรเตอร์ (Starting torque, Locked rotor สูงขึ้นกับอุปกรณ์ภายใน กรณี MCC เป็นตู้ อินเตอร์ล็อกระหว่างชุด MCC หรือไม่มีการ
torque) คือแรงบิดที่ได้เมื่อเร่งความเร็วให้ โครงสร้างเหล็กที่แยกเป็นตู้ย่อย ซึ่งแต่ละตู้ อินเตอร์ล็อกไปยังอุปกรณ์ระยะไกล
โหลดที่หยุดอยู่ ย่อยมีขนาดประมาณ 50 ซม. ทำ�ให้ต่อเชื่อม ● ประเภท 2 เป็นการจัดกลุ่มรวมกัน
เข้าด้วยกันที่หน้างานได้ นอกจากนั้นยังมีตู้ เพื่อให้ระบบสมบูรณ์ของชุดควบคุมมอเตอร์,
การนำ�ศูนย์ควบคุมมอเตอร์ที่ทัน MCC แบบพิเศษ เช่น แบบต้านฝุ่นและ ชุดต่อแยกสายป้อน และชุดอื่นๆ MCC
สมัยมาใช้งาน น้ำ�มัน, แบบกันฝน เป็นต้น ประเภทนี้หลายชุดจะต่อกับบัสไฟฟ้าร่วมโดย
ศูนย์ควบคุมมอเตอร์ (Motor control มีอินเตอร์ล็อกทางไฟฟ้า หรือมีการเดินสาย
center-MCC) เป็นวิธีจัดทำ�กลุ่มทำ�งานและ ภายในระหว่างชุด MCC หรืออินเตอร์ล็อกไป
ควบคุมให้กับตัวควบคุมมอเตอร์และอุปกรณ์ ยังอุปกรณ์ระยะไกลได้
จ่ายไฟฟ้ารวมทั้งอุปกรณ์อัตโนมัติ โดยตั้งบน ● ชนิด A เป็น MCC ที่เดินสายน้อย
พื้นได้อย่างอิสระ การออกแบบเป็นรูปแบบ ที่สุดและราคาต่ำ�สุด ซึ่งโหลดของผู้ใช้และ
โมดู ล ลาร์ จ ะง่ า ยต่ อ การติ ด ตั้ ง และใช้ ง าน การเดินสายควบคุมจะต่อกับชุดสตาร์ตโดย
ตลอดจนประหยัดเวลาและราคารวมทั้งใช้ ตรง
พื้นที่ได้อย่างประหยัดอีกด้วย รูปที่ 6 ชุดสตาร์ตมอเตอร์ที่ติดตั้งใน MCC ● ชนิด B เป็น MCC ที่มีแผงขั้วต่อ
MCC ติดตั้งชุดสตาร์ตร่วมกันได้หลาย แบบโมดูลาร์ สายจากโรงงานสำ�หรับสายควบคุม กล่อง
ชนิด เช่น ชนิดหมุนกลับแบบแรงดันไฟฟ้า MCC จะมีรางเดินสายแบบเครือข่าย ขั้วต่อสายอาจจะติดตั้งอยู่ในชุดสตาร์ตหรือ
เต็ม, ชนิดหลายความเร็ว, ชนิดสตาร์ตแบบ ซึ่งรางเดินสายแนวดิ่งจะมีความสูงเต็มในแต่ ที่รางเดินสายแนวดิ่งใกล้ชุดสตาร์ต ซึ่งเดิน
ลดแรงดันไฟฟ้า เป็นต้น และรวมถึงชุดส ละตู่ย่อย และต่อกับรางแนวนอนที่ด้านบน สายให้โหลดของผู้ใช้ที่มีขนาดใหญ่ให้ต่อตรง
ตาร์ตแบบโซลิดสเตต ดังตัวอย่างในรูปที่ 5 และด้านล่าง ซึ่งการเพิ่มตู้ย่อยจะเดินสาย กับขั้วต่อสายของชุดสตาร์ต
ไฟฟ้าไปยังแต่ละตู่ย่อยได้โดยไม่ต้องใช้ท่อ ● ชนิด C เป็น MCC ที่มีบล็อกขั้วต่อ
ระบบบัสไฟฟ้าจะมีบัสแนวนอนเดินเต็ม สายจากโรงงาน โดยมีกลุ่มบล็อกขั้วต่อสาย
ความยาว และกระจายไปแต่ละตู้ย่อย บัส หลักที่ใกล้กับสายด้านเข้าที่ด้านบนหรือด้าน
แนวนอนอาจจะเป็นอะลูมิเนียมเคลือบดีบุก ล่างของแต่ละตู้ย่อย
หรือทองแดงเคลือบดีบุก หรือทองแดงเคลือบ 2. พิกัดลัดวงจร
เงิน โดยมีพิกัดทั่วไปจาก 600A ถึง 2000A โดยปกติแล้วพิกัดของชุดโครงสร้างบัส
แต่ ล ะตู้ ย่ อ ยจะมี ร ะบบบั ส แนวดิ่ ง ที่ รั บ และชุดสตาร์ตจะแยกกัน ซึ่งที่โครงสร้างบัส
รูปที่ 5 MCC ติดตั้งชุดสตาร์ตชนิดต่างๆ ไฟฟ้าจากบัสแนวนอน ซึ่งส่วนใหญ่จะเสียบ จะต้องมีพิกัดทนกระแสไฟฟ้าสูงสุดได้โดยไม่
และอุปกรณ์ต่างๆ ได้
อุปกรณ์ประกอบเข้ากับบัสแนวดิ่ง โดยปกติ ทำ�ให้ส่วนประกอบหรือฉนวนของบัสเสียหาย
ส่วนประกอบแต่ละชิ้นใน MCC จะไม่ แล้วบัสแนวดิ่งจะมีพิกัด 300A ถึง 600A ชุดส่วนประกอบจะต้องมีพิกัดการตัดกระแส
ต่างจากตัวควบคุมที่ติดตั้งแต่ละชุด นั่นคือ ลัดวงจรที่สามารถตัดกระแสไฟฟ้าสูงสุดของ
ชุดสตาร์ตที่รวมกันใน MCC จะมีการทำ�งาน 1. ชนิดและประเภทตาม NEMA ชุดสตาร์ตหรือชุดสายป้อนวงจรย่อยได้อย่าง
เช่ น เดี ย วกั บ ชุ ด สตาร์ ต หลายชุ ด ที่ แ ยกอยู่ NEMA มีการจัดประเภท (class) และ ปลอดภัย
คนละตู้ ชนิด (type) ของการเดินสายของ MCC เพื่อ พิกัดการลัดวงจรสูงสุดของ MCC ทั้ง
นอกจากชุดสตาร์ตที่อยู่ใน MCC แล้ว ให้สามารถเลือกประเภทและชนิดในการเข้า หมดจะต้องเป็นพิกัดการทนได้ของโครงสร้าง
ISSUE4/18FEBRUARY-APRIL2012
71
69-�����������������4-18.indd 3 4/15/12 11:30 PM
กล
ไฟ
ฟ้ ง
าแล
ะ เ ค รื่ อ
บัสและพิกัดการตัดกระแสของชุด MCC โดยใช้เครื่องช่วยฟังเสียง (เช่นเดียวกับหูฟัง เครื่องมือวัดความตึงของสายพานในรูปที่ 8
3. ข้อดีของการใช้ MCC ของแพทย์) หรือเครื่องสแกนอินฟราเรดตาม และทำ�งานโดยไม่เกิดเสียงรบกวนมากเกินไป
การใช้ MCC มีข้อดีคือ การติดตั้งและ รูปที่ 7
การเดินสาย MCC แต่ละชุดทำ�ได้ง่าย ไลน์
ไฟฟ้าของชุด MCC ทั้งหมดจะเชื่อมต่อกับ
หนึ่งบัสได้ง่ายและประหยัด ทำ�ให้ค่าติดตั้ง
ลดลงจากค่าติดตั้งชุดสตาร์ตหลายชุดรวม
กันเป็นอย่างมาก
นอกจากนี้ MCC ทำ�ให้ประหยัดพื้นที่ได้
มากและวางตัง้ ได้อย่างเป็นอิสระ อีกทัง้ สามารถ
วางใกล้กับอุปกรณ์ที่กำ�ลังควบคุมได้มากกว่า
กรณีที่ต้องการขยาย MCC ก็ทำ�ได้ง่ายโดย รูปที่ 7 การตรวจสอบด้วยอินฟราเรดใน
มอเตอร์ 100 แรงม้าของปั๊มน้ำ�เย็น เพื่อได้
วางในพื้นที่ว่างต่อจาก MCC เดิมและยึด ภาพความร้อนของแบริ่งและคับลิง
ด้วยสกรู
เทคโนโลยีล่าสุดที่นำ�มาไว้ใน MCC คือ 1. การบำ�รุงรักษามอเตอร์
ชุดสตาร์ตแบบลดแรงดันไฟฟ้าชนิดโซลิดสเตต, การบำ�รุงรักษาเบือ้ งต้นสำ�หรับมอเตอร์คอื รูปที่ 8 การใช้เครื่องมือวัดความตึงของ
ชุดขับแบบแปรความเร็วได้ชนิดโซลิดสเตต, การหล่อลืน่ ทีแ่ บริง่ และเครือ่ งจักรตามคูม่ อื ของ สายพาน
รีเลย์โหลดเกินชนิดโซลิดสเตต, ระบบจัดการ ผู้ผลิต ในสภาพแวดล้อมที่ไม่ดีควรเปลี่ยน
พลังงานที่ใช้ไมโครโปรเซสเซอร์และตัวควบ น้�ำ มันหล่อลื่นอย่างน้อยเดือนละครั้ง และจะ 4. ตรวจสอบการวางแนว (Alignment)
คุมแบบโปรแกรมได้ ต้องระวังไม่ให้หล่อลื่นมากเกินไป เนื่องจาก ของมอเตอร์กบั โหลด ซึง่ การวางแนวทีเ่ หมาะสม
จารบีหรือน้ำ�มันหล่อลื่นอาจจะไหลเข้าในชุด ระหว่างมอเตอร์กับโหลดจะยืดอายุของแบริ่ง
การบำ�รุงรักษาเชิงป้องกัน ขดลวดและทำ�ให้ฉนวนเสื่อมได้ ออกไป รูปที่ 9 แสดงวิธตี รวจสอบการวางแนว
สำ�หรับมอเตอร์ มอเตอร์ ที่ สำ � คั ญ หรื อ มอเตอร์ ที่ มี ร อบ ด้วยมิเตอร์แบบหน้าปัด รูป (ก) มิเตอร์
การหยุดทำ�งานในโรงงานโดยบังเอิญ ส่ง ทำ�งานถี่นั้น ควรตรวจสอบและบำ�รุงรักษา แสดงมุมเพลาที่วางแนวผิด ซึ่งที่ถูกต้องจะ
ผลลัพธ์ให้เกิดความสูญเสียทางธุรกิจจำ�นวน ดังนี้ ต้องมีมุมเป็นศูนย์ ส่วนรูป (ข) มิเตอร์แสดง
มหาศาล จึงต้องมีการบำ�รุงรักษาเชิงป้องกัน 1. ตรวจสอบแบริ่ง โดยกระทำ�ทุกวัน การไม่อยู่ในแนวแกน ซึ่งแก้ไขได้โดยชดเชย
ที่วางแผนไว้อย่างดี เพื่อให้มอเตอร์ท�ำ งานได้ หรืออย่างน้อยทุกสัปดาห์ด้วยเครื่องช่วยฟัง การต่อเชื่อมเพียงเล็กน้อย รูป (ค), (ง), (จ)
อย่างมีประสิทธิภาพและอายุยาวนานขึ้น ซึ่ง เสียง, เครื่องสแกนอินฟราเรดหรือเครื่อง แสดงการตรวจสอบชุดขับสายพาน
การบำ�รุงรักษาเชิงป้องกันสำ�หรับมอเตอร์จะ วิเคราะห์การสั่นสะเทือน นอกจากนั้นควร
มีประสิทธิภาพเมื่อมีอุปกรณ์ทดสอบและมี ตรวจสอบอุณหภูมิผิวของแบริ่งด้วยเทอร์โม
การอบรมที่เหมาะสม ในการวางแผนจึงต้อง มิเตอร์หรือใช้อุปกรณ์วัดอุณหภูมิแบบอิเล็ก
พิจารณาอุปกรณ์และเวลาที่ต้องการตรวจ ทรอนิกส์ แล้วเปรียบเทียบอุณหภูมแิ บริง่ ทีร่ อ้ น
สอบและบันทึกผลอย่างเที่ยงตรง กับอุณหภูมิแบริ่งที่ทำ�งานปกติ
วิธีบำ�รุงรักษาแบบต่างๆ อาจจะใช้กับ 2. ตรวจสอบช่องอากาศ (Air gap)
มอเตอร์ แ ต่ ล ะชนิ ด และตั ว ควบคุ ม หรื อ ระหว่างโรเตอร์กบั สเตเตอร์ โดยวัดทัง้ ด้านบน
อุปกรณ์ที่เกี่ยวข้องแตกต่างกัน ซึ่งควรเลือก และด้านล่างของสเตเตอร์ด้วยแผ่นวัดช่อง
วิธีดีที่สุดและเหมาะกับงานที่ทำ� เช่น การ ว่าง (Feeler gauge) อย่างน้อยปีละครั้ง ซึ่ง
พิจารณารายละเอียดจากชิ้นส่วนต่างๆ ที่ ค่าความแตกต่างที่อ่านได้ในแต่ละปีจะแสดง รูการขั ปที่ 9 การตรวจสอบการขับแบบต่อตรงและ
บด้วยสายพาน
เกี่ยวกับอุณหภูมิและเสียงที่ผิดปกติ เพื่อ ถึงสภาพของชุดติดตั้งแบริ่ง
ตรวจซ่ อ มแบริ ่ ง ของมอเตอร์ หรือติดตั้ง 3. ตรวจสอบความตึงของสายพาน ให้
อ่ า น ต่ อ ห น้ า 7 7 ➪
อุปกรณ์เฝ้าตรวจอุณหภูมิและการตรวจสอบ มีความตึงพอดีกับชุดติดตั้งตามกำ�หนดด้วย
72 ISSUE4/18FEBRUARY-APRIL2012
69-�����������������4-18.indd 4 4/15/12 11:30 PM
กล
ไฟ
ฟ้ ง
าแล
ะ เ ค รื่ อ
ต่ อ จ า ก ห น้ า 7 2
5. ตรวจสอบแปรงถ่านและคอมมิวเต- แม่เหล็กแตะบนแบริ่งที่ต�ำ แหน่งต่างๆ เพื่อ พยากรณ์ จะช่วยโอนถ่ายข้อมูลจากเครื่อง
เตอร์ ในมอเตอร์ DC นั้นจะต้องแน่ใจว่า เปรียบเทียบกับค่าที่บันทึกไว้ตอนเริ่มติดตั้ง วิเคราะห์ไปยังเครื่องคอมพิวเตอร์ได้อย่าง
แปรงถ่ า นทั้ ง หมดมี ส ภาพนำ � ไฟฟ้ า และมี ซึ่งจะช่วยให้แก้ไขปัญหาได้ง่ายขึ้น รวดเร็ว ทำ�ให้วิเคราะห์ความล้มเหลวและ
ความแข็ ง ที่ เ หมาะสมโดยใส่ พ อดี กั บ ที่ ยึ ด มอเตอร์เกิดการสัน่ สะเทือนได้จากการหมุน สภาพบกพร่องต่างๆ ได้ เช่น แหวนแตก
แปรงถ่าน นอกจากนั้นควรตรวจสอบความ การทราบถึงความถี่ในการหมุนที่มีฮาร์มอนิก ชำ�รุด, การไม่สมดุล, การหลุดหลวม เป็นต้น
ดันสปริงของที่ยึดแปรงถ่านซึ่งควรอยู่ในช่วง ทำ�ให้วิเคราะห์ปัญหาที่เกิดขึ้นได้ชัดเจน แม้ 7. ทำ � ให้ ม อเตอร์ ส ะอาดและเย็ น
2 - 2.5 ปอนด์ต่อตารางนิ้วของพื้นที่หน้าตัด ว่าเครื่องมือวิเคราะห์การสั่นสะเทือนสำ�หรับ สภาพแวดล้ อ มในการทำ � งานที่ ส กปรกนั้ น
แปรงถ่านตามรูปที่ 10 มอเตอร์จะมีหลายชนิด แต่เครื่องวิเคราะห์ ควรใช้ เ ครื่ อ งเป่ า ฝุ่ น ออกจากตั ว มอเตอร์
สเปกตรัมสั่นสะเทือนแบบแปลงฟูริเยร์เร็ว บ่อยๆ ส่วนบริเวณที่มีอุณหภูมิสูงควรเผื่อ
(Fast Fourier Transform - FFT) จะให้ผลที่ ขนาดมอเตอร์ให้มากขึ้น เนื่องจากอุณหภูมิ
เที่ยงตรงได้สูงถึง 200% บรรยากาศที่สูงเกินจะทำ�ให้อายุของมอเตอร์
เครือ่ งวิเคราะห์สเปกตรัมการสัน่ สะเทือน ลดลง ในช่วงที่มีวันหยุดและมีการบำ�รุงรักษา
FFT จะมีมเิ ตอร์เร่งความเร็ว (accelerometer) ระบบนั้นให้ตรวจสอบ, ทดสอบ, ทำ�ความ
ติดตั้งทางแม่เหล็ก และมีโพรบไว้สัมผัสกับ สะอาด และตรวจสอบอุปกรณ์เบ็ดเตล็ดเพื่อ
โครงมอเตอร์ ทำ�ให้สามารถเก็บข้อมูลได้ ปรับสภาพให้สมบูรณ์
ความถีใ่ นการหมุนเป็นส่วนหนึง่ ของสเปกตรัม 8. จัดทำ�รายงานอย่างเที่ยงตรง ควร
สัน่ สะเทือนทีใ่ ห้ประโยชน์ได้ เช่น ความเสถียร ทดสอบความต้านทานฉนวนประจำ �ปี และ
ของแบริ่ง, ความสมดุลของโรเตอร์, การตั้ง ทดสอบอื่นๆ ตามรูปที่ 13 การตรวจสอบ
ศูนย์และระยะห่างของเพลา เทคโนโลยี FFT มอเตอร์ด้วยสายตาก็มีความสำ�คัญเช่นเดียว
จะแปลงข้อมูลแอนาลอกเป็นดิจิตอล และ กั บ การตรวจสอบแรงดั นไฟฟ้ า และกระแส
แสดงผลเป็นรูปภาพหรือสเปกตรัมได้ตามรูป ไฟฟ้า ซึ่งรายงานและการเปรียบเทียบค่าที่
ที่ 12 อ่ า นได้ ใ นแต่ ล ะปี จ ะแสดงถึ ง แนวโน้ ม และ
นอกจากนี้หากใช้ซอฟแวร์บำ�รุงรักษาเชิง สภาพในการใช้งานของมอเตอร์
รูปที่ 10 การตรวจสอบแปรงถ่าน
6. ตรวจสอบการติดตั้ง โดยตรวจสอบ
โบลต์ยึดและฐานเหล็กว่ารองรับการกระเทือน
ได้และฐานคอนกรีตไม่แตกร้าวหรือกะเทาะ
รูปที่ 11 แสดงการทดสอบวิเคราะห์การสั่น
สะเทือนประจำ�ปีสำ�หรับมอเตอร์เหนี่ยวนำ� รูปที่ 12 ตัวอย่างการวัดความสั่นสะเทือนด้วยเครื่อง
250 แรงม้าด้วยเครื่องมือวัด โดยใช้โพรบ วิเคราะห์สเปกตรัมการสั่นสะเทือน FFT
รูปที่ 13 การทดสอบความต้านทาน
รูปที่ 11 การทดสอบวิเคราะห์การสั่นสะเทือนของมอเตอร์ ฉนวนด้วยเครื่องมือวัด
ISSUE4/18FEBRUARY-APRIL2012
77
69-�����������������4-18.indd 5 4/15/12 11:31 PM
กล
ไฟ
ฟ้ ง
าแล
ะ เ ค รื่ อ
2. การบำ�รุงรักษาระบบควบคุม แกนสเตเตอร์และแผ่นลามิเนตที่เป็นเหล็ก ปิดผนึก (Sealed bearing) จะป้องกันการ
มอเตอร์ บางเคลือบฉนวนเพื่อลดกระแสวน รวมทั้ง ปนเปื้อนและไม่ต้องหล่อลื่นตามวาระ แต่จะ
รายละเอี ย ดในการบำ � รุ ง รั ก ษาระบบ สภาพโรเตอร์ หลั ง จากนั ้ น จึ ง ตรวจสอบ เกิ ด ความฝื ด มากกว่ า แบริ่ ง แบบมี กำ � บั ง
ควบคุมมอเตอร์มีดังนี้ ชุดขดลวดดังตัวอย่างในรูปที่ 14 ซึ่งเป็นการ (Shielded bearing) หรือแบบเปิด (Open
1. ทำ � ความสะอาดอุ ป กรณ์ ค วบคุ ม เอาชุดขดลวดเก่าออกโดยการอบสเตเตอร์ใน bearing)
สภาพแวดล้อมในการทำ�งานทีส่ กปรกนัน้ ควร เตาอบเพื่อละลายวานิชที่เป็นฉนวน แต่จะ 3. การระบายอากาศ การใช้พดั ลมภาย
ใช้เครื่องเป่าฝุ่นออกไปทุกสัปดาห์ มิฉะนั้นจะ ต้องทำ�ให้อุณหภูมิในเตาอบเหมาะสมเพื่อ นอกจะให้ประสิทธิภาพต่�ำ กว่า ส่วนการระบาย
ต้องทำ�ความสะอาดอย่างสมบูรณ์ทุก 3 เดือน รักษาสภาพฉนวนของแผ่นลามิเนต อากาศจะขึน้ กับการออกแบบพัดลม เช่น เส้น
หรือทุก 6 เดือน ผ่านศูนย์กลาง, จำ�นวนและขนาดใบพัด, วัสดุ
2. ตรวจสอบการทำ�งานของคอนแทก และการเคลือบผิว และการทาสี เป็นต้น
เตอร์และรีเลย์ด้วยมือ ซึ่งทราบถึงการบิดงอ ทั้งนี้เส้นผ่านศูนย์กลางจะมีผลมากที่สุด และ
หรือสะดุดหรือไม่ ซึ่งชิ้นส่วนเคลื่อนที่ได้จะ ควรเปลี่ยนพัดลมที่ชำ�รุดด้วยพัดลมที่ลักษณะ
ต้องทำ�งานโดยไม่มีความฝืดมากเกินไป และ เหมือนเดิม
ควรตรวจสอบการหลุดหลวมของการต่อต่างๆ 4. การทดสอบ ทดสอบความสูญเสียใน
3. ตรวจเช็คหน้าสัมผัส (Contact) โดย แกนมีความสำ�คัญต่อการพิสูจน์สภาพแกน
ตรวจสภาพและตรวจสัญญาณการเกิดความ รูปที่ 14 การพันขดลวดใหม่ ให้มอเตอร์จะ ของสเตเตอร์ ซึ่งควรวัดค่าวัตต์ต่อกิโลกรัม
ร้อนสูง เช่น โลหะหรือฉนวนเปลี่ยนสี อีกทั้ง ต้องใช้ทักษะและเครื่องมือพิเศษ ก่อนและหลังการอบ โดยมีแผงทดสอบ, เครือ่ ง
ตรวจสอบความดันของหน้าสัมผัสว่าเหมาะ ควรทดสอบความสูญเสียในแกนก่อนและ มือ และแหล่งจ่ายไฟฟ้าที่เพียงพอต่อการ
สมตามรายละเอียดของผู้ผลิต หลังเอาชุดขดลวดเก่าออก โดยใช้วัตต์มเิ ตอร์ ทดสอบภาวะไม่มีโหลด รวมทั้งใช้บริดจ์ที่
4. ทดสอบรี ซิ ส แตนซ์ ข องหน้ า สั ม ผั ส และแหล่งจ่ายไฟฟ้า ค่าที่อ่านได้เป็นวัตต์ต่อ เที่ยงตรงเพื่อวัดรีซิสแตนซ์ของชุดขดลวดที่
ควรทดสอบรี ซิ ส แตนซ์ของหน้าสัมผัสด้วย ปอนด์หรือวัตต์ต่อกิโลกรัม จะช่วยให้ทราบ มีค่าต่ำ�มาก แล้วจึงปรับค่ารีซิสแตนซ์จาก
โอห์มมิเตอร์ที่มีความต้านทานต่ำ� ซึ่งค่า ว่าแกนอยู่ในสภาพดีและทนต่อการอบได้ อุณหภูมิของชุดขดลวดสู่อุณหภูมิมาตรฐาน
เหมาะสมควรประมาณ 50 ไมโครโอห์ม แล้ว 1. ชุดขดลวด พื้นที่หน้าตัดของลวดตัว (25 ํC)
บันทึกค่าที่อ่านได้ไว้เปรียบเทียบในอนาคต นำ�ทำ�ให้ทราบถึงปริมาณทองแดงในมอเตอร์ รูปที่ 15 แสดงความสูญเสียต่างๆ ของ
5. ตรวจสอบและทำ�ความสะอาดรีเลย์ ซึ่งพื้นที่หน้าตัดของลวดตัวนำ�ที่มีขนาดใหญ่ มอเตอร์ เช่น ความสูญเสียปลีกย่อยเนื่องจาก
โหลดเกิน โดยปกติแล้วในการบำ�รุงรักษา จะมี ค วามสู ญ เสี ย ในทองแดงหรื อ ความ โหลด (Stray load loss), ความสูญเสียจากลม
รีเลย์นค้ี อื ตรวจสอบว่าพิกดั หรือปรับตัง้ ถูกต้อง ต้านทานต่�ำ ซึ่งขนาดหน้าตัดต่อแอมป์ของ และความฝืด (Friction and windage loss),
และทำ�ความสะอาดหน้าสัมผัสไม่ให้มอี อกไซด์ ชุดขดลวดใหม่จะต้องไม่ต่ำ�กว่าชุดขดลวด ความสูญเสียของชุดขดลวดสเตเตอร์ (Stator
นอกจากนี้ควรทดสอบและปรับเทียบรีเลย์ทุก เดิมมิฉะนั้นประสิทธิภาพจะลดลง winding loss), ความสูญเสียในแกนของสเตเตอร์
หนึ่งปีถึงสามปี โดยใช้อุปกรณ์เฉพาะในการ 2. แบริ่ง ระยะห่างภายในของแบริ่งจะ (Stator core loss), ความสูญเสียของโรเตอร์
ทดสอบ เช่น เครื่องทดสอบรีเลย์โหลดเกิน กำ�หนดตามมาตรฐานทัว่ ไป (C-3) แบริง่ แบบ (Rotor loss)
เป็นต้น
3. การพันขดลวดมอเตอร์ใหม่
การพันขดลวดมอเตอร์ให้มปี ระสิทธิภาพ
สูงขึ้นได้นั้น จะต้องทราบถึงกระบวนการพัน
ขดลวดก่อนดำ�เนินการ เช่น การพิจารณา
ความต้านทานของชุดขดลวดที่คำ�นวณใหม่
ให้ตรงตามอุณหภูมิใช้งาน และการทดสอบ
ความสูญเสียในแกน รวมทัง้ ส่วนประกอบอืน่ ๆ
และวิธีพันขดลวดใหม่
รูปที่ 15 ความสูญเสียต่างๆ ของมอเตอร์
การตรวจสอบมอเตอร์เก่าจะต้องพิจารณา
78 ISSUE4/18FEBRUARY-APRIL2012
69-�����������������4-18.indd 6 4/15/12 11:31 PM
You might also like
- การใช้งานและการบำรุงรักษามอเตอร์Document6 pagesการใช้งานและการบำรุงรักษามอเตอร์Warong Natdurong100% (2)
- Drive Motor ReportDocument17 pagesDrive Motor ReportNatthakit1965No ratings yet
- 84Document21 pages84Tor-tahan Chanasongkram OnchuNo ratings yet
- Tip MotorDocument11 pagesTip Motortou007No ratings yet
- ความรู้พื้นฐานเครื่องกำเนิดไฟฟ้าDocument13 pagesความรู้พื้นฐานเครื่องกำเนิดไฟฟ้าWarawutBoondethNo ratings yet
- หม้อแปลงไฟฟ้าDocument6 pagesหม้อแปลงไฟฟ้าPadungdet thammacharoenNo ratings yet
- TNP Unit 8 PDFDocument48 pagesTNP Unit 8 PDFเคที อิเลกNo ratings yet
- ปรับตั้งโอเวอร์โหลดDocument4 pagesปรับตั้งโอเวอร์โหลดVorapoj Pa SNo ratings yet
- บทที่ 1-5Document67 pagesบทที่ 1-5Arthit Somrang0% (1)
- การบำรุงรักษามอเตอร์ไฟฟ้าDocument12 pagesการบำรุงรักษามอเตอร์ไฟฟ้าPitiporn Hasuankwan50% (2)
- กระแส ทอร์ค และการเลือก vfd ที่เหมาะสมกับ motorDocument8 pagesกระแส ทอร์ค และการเลือก vfd ที่เหมาะสมกับ motormoral2525No ratings yet
- มอเตอร์ยูนิเวอร์แซลDocument17 pagesมอเตอร์ยูนิเวอร์แซลBank67% (3)
- แหล่งจ่ายไฟDocument35 pagesแหล่งจ่ายไฟchanok2210% (1)
- EE7Document16 pagesEE7nutchai2538No ratings yet
- 36 รถยนต์Document39 pages36 รถยนต์ອູ່ ໄຊ ອິນເຕີNo ratings yet
- Assignment ที่1 Pijaya 64601233Document5 pagesAssignment ที่1 Pijaya 64601233Pijaya ChartpolrakNo ratings yet
- Chapter1มอเตอร์ไฟฟ้ากระแสสลับ 1 เฟสDocument18 pagesChapter1มอเตอร์ไฟฟ้ากระแสสลับ 1 เฟสประสิทธิ์ สุวรรณโณNo ratings yet
- มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสDocument33 pagesมอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสThananuwat Suksaro100% (4)
- การทดสอบสมรรถนะของเครื่องกำเนิดไฟฟ้าDocument133 pagesการทดสอบสมรรถนะของเครื่องกำเนิดไฟฟ้าKittisakNo ratings yet
- Assignment ที่2 Pijaya 64601233Document5 pagesAssignment ที่2 Pijaya 64601233Pijaya ChartpolrakNo ratings yet
- บทที่08- การป้องกันมอเตอร์-01Document12 pagesบทที่08- การป้องกันมอเตอร์-01Ahmed Sabri100% (2)
- 33Document32 pages33ອູ່ ໄຊ ອິນເຕີNo ratings yet
- MCC ElectricalDocument16 pagesMCC ElectricalKuroba Kaito100% (1)
- Ex Short PaperDocument8 pagesEx Short Paperเกศมณี เกษมุติNo ratings yet
- Hall SensorDocument17 pagesHall Sensormanat_swuNo ratings yet
- รายงานเตม บท2 3 4 5 PDFDocument56 pagesรายงานเตม บท2 3 4 5 PDFjakkol11No ratings yet
- ศุภกร 033 อุปกรณ์เอาต์พุตDocument10 pagesศุภกร 033 อุปกรณ์เอาต์พุตsupakorn khlangNo ratings yet
- บทที่01- ปรัชญาทั่วไปของระบบป้องกัน-01Document16 pagesบทที่01- ปรัชญาทั่วไปของระบบป้องกัน-01Ahmed Sabri50% (2)
- 14มอเตอร์Document17 pages14มอเตอร์thunpana pereephonNo ratings yet
- GetA EEE106 Lab 7 - Synchronous GeneratorDocument17 pagesGetA EEE106 Lab 7 - Synchronous GeneratorWattana SaeleNo ratings yet
- ใบงานที่ 6 engee103Document21 pagesใบงานที่ 6 engee103Yannawit JantaNo ratings yet
- 08 Motor ProtectionDocument90 pages08 Motor ProtectionEkarat TopolNo ratings yet
- UntitledDocument51 pagesUntitledSaksit AowhanatNo ratings yet
- 8 - File - 6 บทที่ 3 ช่างไฟฟ้าอุตสาหกรรม - 19102559132854 -Document8 pages8 - File - 6 บทที่ 3 ช่างไฟฟ้าอุตสาหกรรม - 19102559132854 -sing epe.sNo ratings yet
- บทที่04- หลักการของรีเลย์ป้องกัน-01Document13 pagesบทที่04- หลักการของรีเลย์ป้องกัน-01Ahmed Sabri100% (2)
- เครื่องสูบน้ำDocument14 pagesเครื่องสูบน้ำMECHANICAL ENGINEERINGNo ratings yet
- short circuit transformer บทที่ 2 -by nawaphon kaeoketsriDocument21 pagesshort circuit transformer บทที่ 2 -by nawaphon kaeoketsriนวพล แก้วเกษศรีNo ratings yet
- เอกสารประกอบการสอน การวัดและควบคุมกระบวนการ หน่วยที่ 6 ตัวแปลงสัญญาณDocument32 pagesเอกสารประกอบการสอน การวัดและควบคุมกระบวนการ หน่วยที่ 6 ตัวแปลงสัญญาณEngineering ServiceNo ratings yet
- บทที่10- การป้องกันเครื่องกำเหนิดไฟฟ้า-01Document24 pagesบทที่10- การป้องกันเครื่องกำเหนิดไฟฟ้า-01Ahmed Sabri100% (2)
- ความรู้พื้นฐานเรื่องโรงไฟฟ้าDocument46 pagesความรู้พื้นฐานเรื่องโรงไฟฟ้าmanbkk100% (2)
- ABC of DrivesDocument80 pagesABC of DrivesคุณทองดำNo ratings yet
- การวิเคราะห์ข้อมูลการใช้พลังงานไฟฟ้าDocument20 pagesการวิเคราะห์ข้อมูลการใช้พลังงานไฟฟ้าpatcharapon10870No ratings yet
- Graduatekku,+##default Groups Name editor##,+08Chanthy+Phok 1Document15 pagesGraduatekku,+##default Groups Name editor##,+08Chanthy+Phok 1phum 1996No ratings yet
- 3-บทที่1 ความรู้เบื้องต้นDocument12 pages3-บทที่1 ความรู้เบื้องต้นusa boonbumroongNo ratings yet
- การวิเคราะห์ความผิดปกติในมอเตอร PDFDocument25 pagesการวิเคราะห์ความผิดปกติในมอเตอร PDFSurachat SannokNo ratings yet
- a0671031 ชนิดของมอเตอร์ไฟฟ้ากระแสตรงDocument7 pagesa0671031 ชนิดของมอเตอร์ไฟฟ้ากระแสตรงปาย หนาว67% (3)
- 1Document30 pages1Kanokwan HayaminNo ratings yet
- ออปแอมป์Document47 pagesออปแอมป์chanok22175% (4)
- Bay21 High Efficiency MotorsDocument26 pagesBay21 High Efficiency Motorsyannawitjanta1412No ratings yet
- Electronics Ignition SystemsDocument20 pagesElectronics Ignition Systemswoon3211No ratings yet
- บทที่09- การป้องกันหม้อแปลง-01Document16 pagesบทที่09- การป้องกันหม้อแปลง-01Ahmed Sabri60% (5)
- บทที่ 10Document18 pagesบทที่ 10Thor FunNNo ratings yet
- ระบบไฮดรอลิกในรถแทรกเตอร์Document27 pagesระบบไฮดรอลิกในรถแทรกเตอร์Watsapon JunpayapNo ratings yet
- รายงาน Stepping MotorsDocument7 pagesรายงาน Stepping MotorsKnow2Pro100% (2)
- a7162133 คุณสมบัติมอเตอร์ไฟฟ้ากระแสตรงและการใช้งานDocument12 pagesa7162133 คุณสมบัติมอเตอร์ไฟฟ้ากระแสตรงและการใช้งานabhasaputra100% (1)
- 1 20141103-221329Document9 pages1 20141103-221329ອູ່ ໄຊ ອິນເຕີNo ratings yet
- บทที่ 2 เครื่องให้อาหารแมวDocument12 pagesบทที่ 2 เครื่องให้อาหารแมวParzival D QueenNo ratings yet