You might also like
- Suggestion On How To Use: © 2001 Cooper Bussmann, IncDocument60 pagesSuggestion On How To Use: © 2001 Cooper Bussmann, IncMohammedSaadaniHassaniNo ratings yet
- Basics of SCDocument25 pagesBasics of SCMohamed SabeerNo ratings yet
- Frequency of Maintenance TestingDocument5 pagesFrequency of Maintenance TestingIsmael AhmedNo ratings yet
- Arrivals - Dragon Fist (Zhu Shaoji)Document34 pagesArrivals - Dragon Fist (Zhu Shaoji)Christopher Giataganas92% (12)
- 22 - 5 - 7UT6 Low Imp. REF - enDocument26 pages22 - 5 - 7UT6 Low Imp. REF - enMohammedSaadaniHassaniNo ratings yet
- Transformer TestsDocument54 pagesTransformer TestsMohammedSaadaniHassani75% (4)
- CT SizingDocument62 pagesCT SizingMohamed TalebNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Overcurrent Protection For Phase and Earth FaultsDocument30 pagesOvercurrent Protection For Phase and Earth Faultshossein2012100% (1)
- Current Transformer f2Document61 pagesCurrent Transformer f2MohammedSaadaniHassani100% (3)
- Protection PresentationDocument31 pagesProtection PresentationMohammedSaadaniHassaniNo ratings yet
- Modeling and Simulation in Engineerging Using ModelicaDocument288 pagesModeling and Simulation in Engineerging Using ModelicaRóbinson Erazo100% (3)
- Dr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)Document37 pagesDr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)MohammedSaadaniHassani67% (6)
- Practical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsFrom EverandPractical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsNo ratings yet
- Interposing CT Connections in 3-ph TRDocument12 pagesInterposing CT Connections in 3-ph TRMohammedSaadaniHassaniNo ratings yet
- Energy Loss at 11kv Rural Distribution Feeders in Anand District A Case Study - Confer Paper - 2011 - Prajapati Et AlDocument3 pagesEnergy Loss at 11kv Rural Distribution Feeders in Anand District A Case Study - Confer Paper - 2011 - Prajapati Et AlBBJINo ratings yet
- Power System RelayingDocument22 pagesPower System RelayingKhairul AshrafNo ratings yet
- High Low Impedance BusBar ProtectionDocument92 pagesHigh Low Impedance BusBar ProtectionMohammedSaadaniHassani100% (7)
- Power System Protective Relaying-Part OneDocument22 pagesPower System Protective Relaying-Part OneMohammedSaadaniHassani100% (4)
- Power TransformersDocument90 pagesPower TransformersMohammedSaadaniHassani100% (4)
- 2 Tutorial Handouts 300Document30 pages2 Tutorial Handouts 300Cu Teo100% (1)
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocument44 pagesEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- A F700 PID ControlDocument8 pagesA F700 PID ControlPham LongNo ratings yet
- Paper On Automatic Reclosing Transmission Lines Applications and Its ConsiderationsDocument8 pagesPaper On Automatic Reclosing Transmission Lines Applications and Its ConsiderationsGagan GillNo ratings yet
- Thermal Overload Protection 4Document5 pagesThermal Overload Protection 4Anonymous DKv8vpNo ratings yet
- Differential Protection 7UT6: Power Transmission and DistributionDocument30 pagesDifferential Protection 7UT6: Power Transmission and DistributionMohammedSaadaniHassaniNo ratings yet
- Residual Current Devices in LVDocument36 pagesResidual Current Devices in LVDr_ReedNo ratings yet
- Schneider Ect128 - Design and Use of Current-Limiting Fuse - 1Document30 pagesSchneider Ect128 - Design and Use of Current-Limiting Fuse - 1lbk50100% (1)
- Power System Protective Relaying-Part TwoDocument78 pagesPower System Protective Relaying-Part TwoMohammedSaadaniHassani80% (5)
- Chapter 2 Slides - Overcurrent Protection of RelaysDocument68 pagesChapter 2 Slides - Overcurrent Protection of RelaysDale Steyn100% (3)
- Introduction To PmuDocument15 pagesIntroduction To PmuMahmoud M. ShahwanNo ratings yet
- Distribution System PlanningDocument91 pagesDistribution System PlanningOMAR METRINo ratings yet
- 1 - 2 Voltage Drop Calculations MATHCADDocument9 pages1 - 2 Voltage Drop Calculations MATHCADrian0201No ratings yet
- Total Losses in Power Distribution and Transmission Lines 1Document6 pagesTotal Losses in Power Distribution and Transmission Lines 1Muahmmad ShahzadNo ratings yet
- Protection Principles and ComponentsDocument57 pagesProtection Principles and Componentsyibelta abebeNo ratings yet
- PSCAD ENT Kb-Document-245Document32 pagesPSCAD ENT Kb-Document-245Daniel PrataNo ratings yet
- Bus Bar Protection REV 1Document18 pagesBus Bar Protection REV 1Jai GuptaNo ratings yet
- On-Load Tap-Changers OLTC Fundamentals: by Mats CarlssonDocument118 pagesOn-Load Tap-Changers OLTC Fundamentals: by Mats CarlssonMohammedSaadaniHassani100% (2)
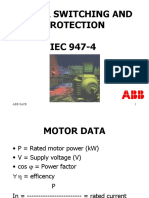
- Motor Switching and ProtectionDocument30 pagesMotor Switching and ProtectionMohammedSaadaniHassani100% (1)
- Reactive Power ManagementDocument120 pagesReactive Power ManagementfadihassanNo ratings yet
- Need For ProtectionDocument79 pagesNeed For ProtectionAbu Baker MuhammadNo ratings yet
- Analysis of Faults AREVADocument110 pagesAnalysis of Faults AREVAMohammedSaadaniHassani100% (3)
- CT154 (Anglais)Document31 pagesCT154 (Anglais)kamlzNo ratings yet
- Transmission Line Protection 2Document28 pagesTransmission Line Protection 2sebsbie zewdu100% (1)
- Protection Systems and Devices (Protective Relays) : Dr. Ahmed SaberDocument31 pagesProtection Systems and Devices (Protective Relays) : Dr. Ahmed SaberMichael AshrafNo ratings yet
- 87 CT Class ExplanationDocument11 pages87 CT Class ExplanationdskymaximusNo ratings yet
- MIND - UM - EN - 2010 - 07 - 2717 - 37 - 10H-9211-20-87439 iPM-9800 Operation Manual (En) 7.0Document300 pagesMIND - UM - EN - 2010 - 07 - 2717 - 37 - 10H-9211-20-87439 iPM-9800 Operation Manual (En) 7.0dianNo ratings yet
- Miniature Circuit Breaker-DetailsDocument7 pagesMiniature Circuit Breaker-Detailssrabon1059No ratings yet
- Application Manual Line Distance Protection REL670 Version 2.2 IEC PDFDocument798 pagesApplication Manual Line Distance Protection REL670 Version 2.2 IEC PDFSathish MuruganNo ratings yet
- PSV Sizing Psv-414 UpdateDocument7 pagesPSV Sizing Psv-414 UpdateBui Khoi NguyenNo ratings yet
- Numerical RelayingDocument49 pagesNumerical RelayingBhargav PandyaNo ratings yet
- Chp-1-Part-1 Fund. of Protection and RelaysDocument97 pagesChp-1-Part-1 Fund. of Protection and RelaysSentex Habasha100% (1)
- 01 - Power System Protection-Basics and Breakers v2 (Revised) PDFDocument55 pages01 - Power System Protection-Basics and Breakers v2 (Revised) PDFJawwad Sadiq Ayon100% (1)
- Arrester Protection DistanceDocument8 pagesArrester Protection DistanceyaoNo ratings yet
- Welcome To The Schneider Electric Seminar On : LV Power Concepts and Devices'Document51 pagesWelcome To The Schneider Electric Seminar On : LV Power Concepts and Devices'MohammedSaadaniHassani100% (3)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Strategic Price NegotiationDocument9 pagesStrategic Price NegotiationMarket Dojo100% (3)
- Fundamentals of Teleprotection SystemsDocument36 pagesFundamentals of Teleprotection SystemsMohammedSaadaniHassani100% (4)
- ABB Transformers Protection CourseDocument56 pagesABB Transformers Protection Coursejha100% (3)
- Introduction of Num - RelayDocument22 pagesIntroduction of Num - RelayManoj SharmaNo ratings yet
- Unit CommitmentDocument50 pagesUnit Commitmentkaouther creationNo ratings yet
- Assignment No. 2: High Voltage Engineering (Eed-421) On Insulation Coordination and Over Voltages in Power SystemsDocument35 pagesAssignment No. 2: High Voltage Engineering (Eed-421) On Insulation Coordination and Over Voltages in Power SystemsRishabh KaliaNo ratings yet
- My NotesDocument87 pagesMy NotesjaimanNo ratings yet
- Electrical Distribution Systems DOC1Document25 pagesElectrical Distribution Systems DOC1Ravi TejaNo ratings yet
- Fault Current and The Effects On Clampstar®: Test At)Document4 pagesFault Current and The Effects On Clampstar®: Test At)Dante FilhoNo ratings yet
- Lec2 (1) PS .NPTEL PDFDocument18 pagesLec2 (1) PS .NPTEL PDFShantha KumarNo ratings yet
- Avoiding Risk of Voltage Instability in A Power System Through Reactive Power Rescheduling and Load SheddingDocument30 pagesAvoiding Risk of Voltage Instability in A Power System Through Reactive Power Rescheduling and Load SheddingManish Kumar sharmaNo ratings yet
- 3 Distribution System DesignDocument15 pages3 Distribution System DesignAHMED YOUSEFNo ratings yet
- Power System Operation and ControlDocument9 pagesPower System Operation and ControlranjithrawalNo ratings yet
- Chapter 1 RegDocument34 pagesChapter 1 RegAlebel AyalnehNo ratings yet
- IdmtDocument3 pagesIdmtAdeel RazaNo ratings yet
- Lightning and Over Voltages ProtectionDocument24 pagesLightning and Over Voltages Protectionvenki249No ratings yet
- Voltage Stability AnalysisDocument29 pagesVoltage Stability Analysisyohannis masreshaNo ratings yet
- Over Current RelayDocument42 pagesOver Current Relayyousafali15100% (1)
- 3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation GuideDocument5 pages3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation Guidesiddiq shahNo ratings yet
- Chapter 3 - CT&VT - Part 2Document34 pagesChapter 3 - CT&VT - Part 2zhafranNo ratings yet
- 04 Non-Pilot Protection of Transmission Lines PDFDocument9 pages04 Non-Pilot Protection of Transmission Lines PDFAHMED BILAL100% (1)
- 鹰爪门擒拿术Document321 pages鹰爪门擒拿术MohammedSaadaniHassani100% (2)
- 1.2 Esquemas de ProteccionDocument40 pages1.2 Esquemas de ProteccionelectricacipNo ratings yet
- 鹰爪派翻子门十路行拳Document151 pages鹰爪派翻子门十路行拳Ng Chee Peng100% (5)
- Wing Chun Fighting Power Method SIU NIM TAODocument184 pagesWing Chun Fighting Power Method SIU NIM TAOAnonymous KMWzXegk100% (1)
- HVDC TransmissionDocument25 pagesHVDC Transmissionmuez zabenNo ratings yet
- Safety SummaryDocument29 pagesSafety SummaryMohammedSaadaniHassaniNo ratings yet
- Star Point LinksDocument4 pagesStar Point LinksMohammedSaadaniHassaniNo ratings yet
- Classification of Electrical System According To Neutral DistributionDocument36 pagesClassification of Electrical System According To Neutral DistributionMohammedSaadaniHassaniNo ratings yet
- Transformer: Professor Mohamed A. El-SharkawiDocument87 pagesTransformer: Professor Mohamed A. El-SharkawiMohammedSaadaniHassani67% (3)
- Transformers: Linear Circuit TheoryDocument19 pagesTransformers: Linear Circuit TheoryMohammedSaadaniHassaniNo ratings yet
- Nickel Aluminium Bronze For Seawater Flattered by ComparisonDocument21 pagesNickel Aluminium Bronze For Seawater Flattered by Comparisondps32No ratings yet
- BW 216Document2 pagesBW 216THRTHQANo ratings yet
- Thermal Conductivity and Stability of Paraffin Wax With Various Nanoparticles Without RevisionDocument30 pagesThermal Conductivity and Stability of Paraffin Wax With Various Nanoparticles Without Revisionvahit06No ratings yet
- Heat Transfer of Non-Newtonian Fluids in Circular Micro-TubeDocument14 pagesHeat Transfer of Non-Newtonian Fluids in Circular Micro-TubeGaurav KhamesraNo ratings yet
- VJTI Presentation DR PawadeDocument67 pagesVJTI Presentation DR PawadeDIPAK VINAYAK SHIRBHATENo ratings yet
- RXV2700Document173 pagesRXV2700Евгений ЗахаровNo ratings yet
- Inside Plant Network Engineer ILEC Telecommunications in Carrollton TX Resume John BallardDocument1 pageInside Plant Network Engineer ILEC Telecommunications in Carrollton TX Resume John BallardJohnBallard2No ratings yet
- NB 65B19 PDFDocument113 pagesNB 65B19 PDFalexNo ratings yet
- Ventilex Breadcrumb Production LeafletDocument5 pagesVentilex Breadcrumb Production LeafletSri. SiriNo ratings yet
- Bruntons Bridge To Cowwarr Weir: RiverDocument1 pageBruntons Bridge To Cowwarr Weir: RiverSunnyNo ratings yet
- ElectricalDocument15 pagesElectricalVictor RamonNo ratings yet
- Elecs Diagnostic ExamDocument2 pagesElecs Diagnostic ExammgoldiieeeeNo ratings yet
- Project ReportDocument7 pagesProject ReportShubham SharmaNo ratings yet
- Processor Verification PDFDocument7 pagesProcessor Verification PDFdovesnest_inNo ratings yet
- Hand Book Jumper SettingDocument30 pagesHand Book Jumper SettingRanjeet SinghNo ratings yet
- Work, Energy, & Power: Chapter 6 (C&J) Chapter 10 (Glencoe)Document29 pagesWork, Energy, & Power: Chapter 6 (C&J) Chapter 10 (Glencoe)Emieleah Lorenzo PauigNo ratings yet
- Ishikawa Diagram: For PowerpointDocument3 pagesIshikawa Diagram: For PowerpointSudhagarNo ratings yet
- 645Document2 pages645Elmon Ray JuratilNo ratings yet
- Pulley 1Document4 pagesPulley 1Vijayakumar SamyNo ratings yet
- Persuasive OutlineDocument4 pagesPersuasive OutlineAlina PortilloNo ratings yet
- Status Report For EDW RB For Katni-Singrauli 5th Sept 2017 1709 Hours CORRECTED Monthly PositionDocument4 pagesStatus Report For EDW RB For Katni-Singrauli 5th Sept 2017 1709 Hours CORRECTED Monthly PositionmchkppNo ratings yet
- 1 Dplmhs ElemDocument136 pages1 Dplmhs ElemPRC Board0% (2)
- The SAC Programme Is Managed by Enterprise SingaporeDocument37 pagesThe SAC Programme Is Managed by Enterprise SingaporeAlanNo ratings yet
- Rev A1: Oman Tank Terminal Company (Ottco)Document2 pagesRev A1: Oman Tank Terminal Company (Ottco)ANIL PLAMOOTTILNo ratings yet
- Honda GCV135 PartsDocument80 pagesHonda GCV135 PartsLUCAPRATNo ratings yet