You might also like
- Thiet Ke Tong Hop Ic So Va He Thong So Lecture7 Cuong (Cuuduongthancong - Com)Document40 pagesThiet Ke Tong Hop Ic So Va He Thong So Lecture7 Cuong (Cuuduongthancong - Com)PhiPhiNo ratings yet
- Metastability and Clock Domain Crossing: IN3160 IN4160Document30 pagesMetastability and Clock Domain Crossing: IN3160 IN4160kumarNo ratings yet
- L5: Simple Sequential Circuits and VerilogDocument25 pagesL5: Simple Sequential Circuits and VerilogKaleb FikreNo ratings yet
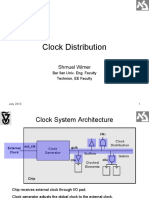
- Clock Distribution: Shmuel WimerDocument75 pagesClock Distribution: Shmuel Wimersenthilkumar100% (1)
- An Introductory Analysis of Pipelines: I I I I I Clock CyclesDocument2 pagesAn Introductory Analysis of Pipelines: I I I I I Clock CyclesWerda FarooqNo ratings yet
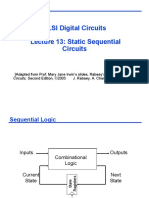
- Static Sequential CircuitsDocument29 pagesStatic Sequential CircuitsfneojwgfjeNo ratings yet
- Timing DiagramDocument23 pagesTiming DiagramAnmol Gupta100% (1)
- VLSI Design I VLSI Design I VLSI Design I VLSI Design IDocument23 pagesVLSI Design I VLSI Design I VLSI Design I VLSI Design ISaksham sangwanNo ratings yet
- Archl FSM 04Document52 pagesArchl FSM 04Ajax KrausNo ratings yet
- Digital IC Design MUXESDocument40 pagesDigital IC Design MUXESPraful KabadiNo ratings yet
- Lecture 8 - Sequantial Logic Circuits - 2014Document32 pagesLecture 8 - Sequantial Logic Circuits - 2014DineshNo ratings yet
- Sequential StaticDocument20 pagesSequential Staticvivek singhNo ratings yet
- Static Timing AnalysisDocument10 pagesStatic Timing AnalysisPushkarNo ratings yet
- Digital Circuits and Systems: Spring 2015 Week 5Document9 pagesDigital Circuits and Systems: Spring 2015 Week 5sharath chandraNo ratings yet
- Capacitance-Resistance Model - Larry Lake PDFDocument99 pagesCapacitance-Resistance Model - Larry Lake PDFsotorkNo ratings yet
- Parallelism in Uniprocessor System and GranularityDocument5 pagesParallelism in Uniprocessor System and GranularityBravoYusuf100% (5)
- Static Sequential CircuitsDocument23 pagesStatic Sequential CircuitsAnubhav SinghNo ratings yet
- Lecture 3 STADocument55 pagesLecture 3 STAAn HuynhNo ratings yet
- Digital Phase Lock LoopsDocument17 pagesDigital Phase Lock LoopsMegha BadadNo ratings yet
- Clocking StrategiesDocument21 pagesClocking Strategiesswapnikasharma100% (1)
- Lec 8Document4 pagesLec 8Ashok kumar MNo ratings yet
- Latch Versus Register: Latch Stores Data When Clock Is LowDocument23 pagesLatch Versus Register: Latch Stores Data When Clock Is LowSrikrishna JanaNo ratings yet
- 04-ECE612-S14-Dynamic Combinational LogicDocument42 pages04-ECE612-S14-Dynamic Combinational LogicOmar Abd ElrhmanNo ratings yet
- Lecture 5Document47 pagesLecture 5Ershad ShaikNo ratings yet
- Introduction To Pipelining Introduction To PipeliningDocument35 pagesIntroduction To Pipelining Introduction To PipeliningKokila IshwarNo ratings yet
- ECEG-4221 VLSI Design: Addis Ababa Institute of Technology (AAIT) Department of Electrical and Computer EngineeringDocument18 pagesECEG-4221 VLSI Design: Addis Ababa Institute of Technology (AAIT) Department of Electrical and Computer EngineeringNuhamin BirhanuNo ratings yet
- Transfer System 101Document14 pagesTransfer System 101Hermione Calliope ChanNo ratings yet
- DSD Exp 5Document7 pagesDSD Exp 5Kanika SinghNo ratings yet
- Digital Integrated Circuits: A Design PerspectiveDocument60 pagesDigital Integrated Circuits: A Design Perspectivesteves0118No ratings yet
- Facilities Design Facilities DesignDocument66 pagesFacilities Design Facilities DesignWahyu SuryaNo ratings yet
- Brkiot 2517Document92 pagesBrkiot 2517Senta ClausNo ratings yet
- WINSEM2021-22 ECE5014 ETH VL2021220505486 Reference Material III 27-04-2022 STA Fundamentals Session2Document31 pagesWINSEM2021-22 ECE5014 ETH VL2021220505486 Reference Material III 27-04-2022 STA Fundamentals Session2AMIT VERMANo ratings yet
- Time Borring and Clock SkewDocument18 pagesTime Borring and Clock SkewNitin Suyan PanchalNo ratings yet
- Section 7: Pipelining Techniques RevisitedDocument15 pagesSection 7: Pipelining Techniques RevisitedMurali SrinivasaiahNo ratings yet
- Lec 7 Inverters IIDocument21 pagesLec 7 Inverters IIjishahaneeshNo ratings yet
- Lecture 11Document34 pagesLecture 11ajayNo ratings yet
- Session 11 CPA PYTHON 44Document6 pagesSession 11 CPA PYTHON 44Chaitanya PatilNo ratings yet
- ADV1594BU FORMATTED FINAL 1507829874065001ITMvDocument53 pagesADV1594BU FORMATTED FINAL 1507829874065001ITMvscribd!!No ratings yet
- Advanced VLSI Design: Timing IssuesDocument88 pagesAdvanced VLSI Design: Timing IssuesSudhanshu BadolaNo ratings yet
- Testability in EOCHL (And Beyond ) : Vladimir ZivkovicDocument24 pagesTestability in EOCHL (And Beyond ) : Vladimir ZivkovicsenthilkumarNo ratings yet
- Lecture2b - AM DemodulationDocument7 pagesLecture2b - AM DemodulationChiranjeev SinghNo ratings yet
- Digital VLSI Design Timing Analysis: Semester B, 2021-22 Lecturer: Zvika Webb 21 March 2022Document86 pagesDigital VLSI Design Timing Analysis: Semester B, 2021-22 Lecturer: Zvika Webb 21 March 2022Shay Samia100% (1)
- SNUG Austin 2012 Paper51 PresentationDocument21 pagesSNUG Austin 2012 Paper51 PresentationvjemmanNo ratings yet
- Thiet Ke Vi Mach So Nang Cao Truong Quang Vinh Asic&Ip Ch4 p1 (Cuuduongthancong - Com)Document31 pagesThiet Ke Vi Mach So Nang Cao Truong Quang Vinh Asic&Ip Ch4 p1 (Cuuduongthancong - Com)tle708062No ratings yet
- Digital Filter Structures Digital Filter StructuresDocument10 pagesDigital Filter Structures Digital Filter StructuresSandeep KumarNo ratings yet
- Brief Introduction To Logic Simulation: Kinds of Logic SimulatorsDocument14 pagesBrief Introduction To Logic Simulation: Kinds of Logic SimulatorsPanku RangareeNo ratings yet
- Vout Vin: EC2006: Control SystemsDocument6 pagesVout Vin: EC2006: Control SystemsMANOJ KUMAR DASNo ratings yet
- EE-221 Chap07 Part-02Document19 pagesEE-221 Chap07 Part-02AliNo ratings yet
- The Deadline-Based Scheduling of Divisible Real-Time Workloads On Multiprocessor PlatformsDocument16 pagesThe Deadline-Based Scheduling of Divisible Real-Time Workloads On Multiprocessor PlatformsAbd Hakim ZakariaNo ratings yet
- Lecture7 Part3Document35 pagesLecture7 Part3aadiNo ratings yet
- Static Sequential XIDocument30 pagesStatic Sequential XISHOBHIT SHARMANo ratings yet
- Chip Level Timing: ECE124 Digital Circuits and SystemsDocument18 pagesChip Level Timing: ECE124 Digital Circuits and SystemspdnoobNo ratings yet
- A Tutorial: Transient Domain Flip-Flop Models For Mixed-Mode SimulationDocument28 pagesA Tutorial: Transient Domain Flip-Flop Models For Mixed-Mode SimulationVinitKharkarNo ratings yet
- Clock Tree Synthesis - Why Clock Tree Synthesis Is Necessary - CSDN BlogDocument21 pagesClock Tree Synthesis - Why Clock Tree Synthesis Is Necessary - CSDN BlogAgnathavasiNo ratings yet
- Static Timing Analysis - MaharshiDocument29 pagesStatic Timing Analysis - MaharshiSatish Yada100% (1)
- L5: Simple Sequential Circuits and VerilogDocument25 pagesL5: Simple Sequential Circuits and VerilogKadal ChaitraNo ratings yet
- Lecture09 Ee620 Digital PLLsDocument45 pagesLecture09 Ee620 Digital PLLsLâm Trần ThànhNo ratings yet
- EE-382M Vlsi-Ii Flip-Flops: Gian Gerosa, IntelDocument48 pagesEE-382M Vlsi-Ii Flip-Flops: Gian Gerosa, IntelDavidNo ratings yet
- Transactional Idiom Analysis Theory and Practice LiontasDocument6 pagesTransactional Idiom Analysis Theory and Practice LiontasMarinaCelesteNo ratings yet
- The Business Case For AI Ethics: Moving From Theory To ActionDocument82 pagesThe Business Case For AI Ethics: Moving From Theory To ActionAll Tech Is Human100% (4)
- Sarah White - Depoliticising Development The Uses and Abuses of ParticipationDocument11 pagesSarah White - Depoliticising Development The Uses and Abuses of Participationpria priyaNo ratings yet
- Semantic Network Analysis in Social SciencesDocument249 pagesSemantic Network Analysis in Social SciencesJUAN FRANCISCO ROZAS DE QUINTANANo ratings yet
- REDASDocument42 pagesREDASSean Franz VilardoNo ratings yet
- Coastal Resource ManagementDocument20 pagesCoastal Resource ManagementJacques GasapoNo ratings yet
- Apigee: People Management Practices and The Challenge of GrowthDocument2 pagesApigee: People Management Practices and The Challenge of GrowthHarsh AgrawalNo ratings yet
- Mistakes Leaders MakeDocument4 pagesMistakes Leaders MakemiaaniaaNo ratings yet
- Software Engineering Notes UNIT 3 Notes Part 2Document8 pagesSoftware Engineering Notes UNIT 3 Notes Part 2Zuhaib AyazNo ratings yet
- Chem Module 3 NotesDocument13 pagesChem Module 3 NotesSujal KavirajNo ratings yet
- 06 Chapter 1Document43 pages06 Chapter 1Lamhot NaibahoNo ratings yet
- Predictive Maintenance - From Data Collection To Value CreationDocument12 pagesPredictive Maintenance - From Data Collection To Value CreationVladimir MarinkovicNo ratings yet
- Unit Assessment Pack (UAP) - Cover Sheet: Student and Trainer/Assessor DetailsDocument106 pagesUnit Assessment Pack (UAP) - Cover Sheet: Student and Trainer/Assessor DetailsTaniyaNo ratings yet
- P&S.01 Top-Down Back-To-Front Project Planning: Dr. Faramarz Fred Rahbar and Dr. James E. Rowings JR., PE CCEDocument7 pagesP&S.01 Top-Down Back-To-Front Project Planning: Dr. Faramarz Fred Rahbar and Dr. James E. Rowings JR., PE CCEBTconcordNo ratings yet
- Knowledge Management As A DoughnutDocument7 pagesKnowledge Management As A DoughnutNigel Psalm YapNo ratings yet
- How To Establish A Water Users AssociationDocument30 pagesHow To Establish A Water Users Associationmirarif80No ratings yet
- CCM 3225 Community DiagnosisDocument7 pagesCCM 3225 Community DiagnosisLulano MbasuNo ratings yet
- Communicating Across CulturesDocument94 pagesCommunicating Across Culturesanca_ramona_sNo ratings yet
- Recomended Books For Geography MainsDocument3 pagesRecomended Books For Geography MainsNizamuddin KhanNo ratings yet
- Inte 2017 0902Document16 pagesInte 2017 0902AniKelbakianiNo ratings yet
- Rani 2Document69 pagesRani 2jainayan819No ratings yet
- ReadingDocument12 pagesReadingAnDreez CamphozNo ratings yet
- William R. Uttal - The Neuron and The Mind - Microneuronal Theory and Practice in Cognitive Neuroscience-Routledge (2016)Document221 pagesWilliam R. Uttal - The Neuron and The Mind - Microneuronal Theory and Practice in Cognitive Neuroscience-Routledge (2016)gfrtbvhNo ratings yet
- Chapter 3: Aims, Objectives and Policy ZonesDocument12 pagesChapter 3: Aims, Objectives and Policy ZonesShivalika SehgalNo ratings yet
- Gathering Network RequirementsDocument30 pagesGathering Network RequirementsAmin ZangetsuNo ratings yet
- 076 - Zainab Assignment 1Document3 pages076 - Zainab Assignment 117460920-076No ratings yet
- 3 Stages of Change ProcessDocument3 pages3 Stages of Change ProcessAsmadera Mat EsaNo ratings yet
- PepsiCo Leadership Competencies / ModelDocument16 pagesPepsiCo Leadership Competencies / Modelconsulting2011100% (5)
- NOTES FOR PRESENTATION. Communication in A WorkplaceDocument5 pagesNOTES FOR PRESENTATION. Communication in A Workplacemarissge909No ratings yet
- MeshingTechniques TrainingWebinar Abaqus612 PDFDocument28 pagesMeshingTechniques TrainingWebinar Abaqus612 PDFMustafa AkbarNo ratings yet