You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- 5Document61 pages5ahmed salimNo ratings yet
- Module5-Signals and systems-ZTDocument14 pagesModule5-Signals and systems-ZTAkul PaiNo ratings yet
- Discrete Time Control SystemDocument17 pagesDiscrete Time Control SystemAshokNo ratings yet
- CH 10Document74 pagesCH 10洪崇恩No ratings yet
- The Z-Transform and Its Roc Properties: - ObjectivesDocument11 pagesThe Z-Transform and Its Roc Properties: - ObjectivesJane LitouwNo ratings yet
- Ch3-DSP ZDocument90 pagesCh3-DSP ZtrucquynhtudoanNo ratings yet
- Z-Transform EasiestDocument31 pagesZ-Transform EasiestGhulam AbbasNo ratings yet
- WINSEM2022-23 BECE202L TH VL2022230502136 2023-04-03 Reference-Material-IDocument11 pagesWINSEM2022-23 BECE202L TH VL2022230502136 2023-04-03 Reference-Material-IAnooshree vijayakumarNo ratings yet
- DSP 2018 Lecture 2Document81 pagesDSP 2018 Lecture 2Alphonse BiziyaremyeNo ratings yet
- 6-Structures For DSPDocument54 pages6-Structures For DSPBomber KillerNo ratings yet
- Z Trns Part1Document21 pagesZ Trns Part1Sourya DasguptaNo ratings yet
- Unit 2 - Digital Signal Processing - WWW - Rgpvnotes.inDocument13 pagesUnit 2 - Digital Signal Processing - WWW - Rgpvnotes.inRohit kumarNo ratings yet
- Chapter3 STDocument99 pagesChapter3 STHoang TranNo ratings yet
- Lecture 28Document11 pagesLecture 28Diptiben GanatraNo ratings yet
- The Z-Transform: ECON 397 Macroeconometrics CunninghamDocument22 pagesThe Z-Transform: ECON 397 Macroeconometrics CunninghamChris AlunanNo ratings yet
- The Z-Transform: Electrical & Electronics Engineering Department Eastern Visayas State UniversityDocument39 pagesThe Z-Transform: Electrical & Electronics Engineering Department Eastern Visayas State Universityryan reasNo ratings yet
- Z TansformDocument65 pagesZ TansformThe Aviator00No ratings yet
- WINSEM2022-23 BECE202L TH VL2022230502136 2023-03-31 Reference-Material-IDocument97 pagesWINSEM2022-23 BECE202L TH VL2022230502136 2023-03-31 Reference-Material-IAnooshree vijayakumarNo ratings yet
- EEE 237 Z TransformDocument68 pagesEEE 237 Z Transformmahir faisalNo ratings yet
- Chapter 4. The Z-Transform: Gao Xinbo School of E.E., Xidian UnivDocument42 pagesChapter 4. The Z-Transform: Gao Xinbo School of E.E., Xidian UnivREYNOLS279No ratings yet
- Chap 3 Z TransformDocument93 pagesChap 3 Z TransformJames Jone100% (1)
- The Z-Transform and Inverse Z-Transform: Digital Signal ProcessingDocument22 pagesThe Z-Transform and Inverse Z-Transform: Digital Signal Processingsahale sheraNo ratings yet
- D DTTF FTT N NE EN NP P ZZ Ee: DSP - Z-Transform IntroductionDocument24 pagesD DTTF FTT N NE EN NP P ZZ Ee: DSP - Z-Transform IntroductionSheelaj BabuNo ratings yet
- Frequency Analysis of Signals & Systems: Electrical & Electronics Engineering Department Eastern Visayas State UniversityDocument39 pagesFrequency Analysis of Signals & Systems: Electrical & Electronics Engineering Department Eastern Visayas State Universityryan reasNo ratings yet
- L01 - Review of Z TransformDocument17 pagesL01 - Review of Z TransformRanjith KumarNo ratings yet
- DSP Lecture Notes 1-2Document78 pagesDSP Lecture Notes 1-2Ashok BattulaNo ratings yet
- As A Tool For Solving Discrete-Time Linear Time-Invariant SystemsDocument39 pagesAs A Tool For Solving Discrete-Time Linear Time-Invariant Systemsmjrahimi.eee2020No ratings yet
- Lecture 16: Z-Transform: XZ XNZDocument6 pagesLecture 16: Z-Transform: XZ XNZSourav BanikNo ratings yet
- Region of Convergence and Causality (V1.1)Document24 pagesRegion of Convergence and Causality (V1.1)NURUL SYAHIRAH ANIS BINTI ABD SAMAT STUDENTNo ratings yet
- DSP-Chapter5 Student 19072015Document35 pagesDSP-Chapter5 Student 19072015Ngọc Minh LêNo ratings yet
- Z Transform: Z Transform and Its Application To The Analysis of LTI SystemsDocument12 pagesZ Transform: Z Transform and Its Application To The Analysis of LTI SystemsJaume TornilaNo ratings yet
- Z TransformDocument71 pagesZ TransformSmitha VasNo ratings yet
- Z TransformDocument81 pagesZ TransformAlberto ManhuaNo ratings yet
- DSP 3Document98 pagesDSP 3Charlaine Bufi PanchoNo ratings yet
- Chapter#4 Z-TransformDocument39 pagesChapter#4 Z-TransformAbraham JemberuNo ratings yet
- Z - Transform - and FiltersDocument30 pagesZ - Transform - and FilterssharifahnabiryeNo ratings yet
- Biosignals & Biosystems: Block 2. The Z-TransformDocument69 pagesBiosignals & Biosystems: Block 2. The Z-Transformmaria reverteNo ratings yet
- XN U N XN XZ XNZ U NZ Z Z XZ ZZ XZDocument2 pagesXN U N XN XZ XNZ U NZ Z Z XZ ZZ XZSudhakar KumarNo ratings yet
- DSP 3Document97 pagesDSP 3Diptiben GanatraNo ratings yet
- Ch6 Z Transform2022Document29 pagesCh6 Z Transform2022Trần TânNo ratings yet
- Keywords: Inversion Method, Method of Residues: XN XZZ DZ JDocument15 pagesKeywords: Inversion Method, Method of Residues: XN XZZ DZ JVipil VijayNo ratings yet
- Digital Signal Processing UWO Lecture+8,+February+1stDocument24 pagesDigital Signal Processing UWO Lecture+8,+February+1stGASR2017No ratings yet
- Lec 5 Ztransforms PDFDocument19 pagesLec 5 Ztransforms PDFdhananjay dudheNo ratings yet
- Fast Fourier Transform (FFT) : ) ( Elsewhere, 0 1 0), ( ) (E N X K X N N N X N XDocument27 pagesFast Fourier Transform (FFT) : ) ( Elsewhere, 0 1 0), ( ) (E N X K X N N N X N XVivien VilladelreyNo ratings yet
- EE302 The Z-TransformDocument23 pagesEE302 The Z-TransformMohmed Al NajarNo ratings yet
- EC 2314 Digital Signal Processing: by Dr. K. UdhayakumarDocument98 pagesEC 2314 Digital Signal Processing: by Dr. K. UdhayakumarSatyam SinghNo ratings yet
- The Z-TransformDocument16 pagesThe Z-TransformDr. Mohiuddin AhmadNo ratings yet
- TT2223 Week 12a Z-TransformDocument39 pagesTT2223 Week 12a Z-TransformAjiMaulanaNo ratings yet
- Chapter 3 Handout Full NewDocument37 pagesChapter 3 Handout Full Newmeseret sisayNo ratings yet
- Z TransformDocument35 pagesZ TransformLai Yon PengNo ratings yet
- Z TransformDocument33 pagesZ TransformSomnathNo ratings yet
- EENG 5610: Digital Signal Processing: Class 3: The Z-Transform and Its ApplicationsDocument32 pagesEENG 5610: Digital Signal Processing: Class 3: The Z-Transform and Its ApplicationsSantosh BommakantiNo ratings yet
- Module1 ZTDocument35 pagesModule1 ZTShruti KumariNo ratings yet
- ZpropDocument1 pageZpropmuhammad jatiNo ratings yet
- Z-Transform: Dang Nguyen Chau. Ho Chi Minh City University of Technology Email: Chaudn@hcmut - Edu.vnDocument28 pagesZ-Transform: Dang Nguyen Chau. Ho Chi Minh City University of Technology Email: Chaudn@hcmut - Edu.vnthienminhNo ratings yet
- Chpter 5 Part 1Document22 pagesChpter 5 Part 1PenziiNo ratings yet
- Lec 8Document59 pagesLec 8Saif AlabdullahNo ratings yet
- ECE411 - 4a - The Z-TransformDocument7 pagesECE411 - 4a - The Z-TransformMartine JimenezNo ratings yet
- Lab4 Z TransformDocument10 pagesLab4 Z Transform215231No ratings yet
- Group-I Main Syllabus Final 05.10.2018Document14 pagesGroup-I Main Syllabus Final 05.10.2018Prasanth PHNo ratings yet
- Java 1Document69 pagesJava 1Kavya MamillaNo ratings yet
- Java 5Document38 pagesJava 5Kavya MamillaNo ratings yet
- CERTI - Copy - Copy (2) - Copy - Copy - Copy (2 Files Merged)Document84 pagesCERTI - Copy - Copy (2) - Copy - Copy - Copy (2 Files Merged)Kavya MamillaNo ratings yet
- Thirrunavukkarasu 2021Document5 pagesThirrunavukkarasu 2021Kavya MamillaNo ratings yet
- Java 4Document65 pagesJava 4Kavya MamillaNo ratings yet
- Common Recruitment Process (CRP) For Recruitment of Probationary Officers - Management Trainees in Participating Banks (CRP PO - MT-XII)Document4 pagesCommon Recruitment Process (CRP) For Recruitment of Probationary Officers - Management Trainees in Participating Banks (CRP PO - MT-XII)Kavya MamillaNo ratings yet
- General Interview QuestionsDocument8 pagesGeneral Interview QuestionsKavya MamillaNo ratings yet
- Cloud Computing Identity As A Service (IDaaS)Document4 pagesCloud Computing Identity As A Service (IDaaS)Kavya MamillaNo ratings yet
- PLSQL Interview QuestionsDocument6 pagesPLSQL Interview QuestionsShabarish SreekakulaNo ratings yet
- Cloud Computing Infrastructure As A Service (IaaS)Document5 pagesCloud Computing Infrastructure As A Service (IaaS)Kavya MamillaNo ratings yet
- Cloud Computing Platform As A Service (PaaS)Document5 pagesCloud Computing Platform As A Service (PaaS)Kavya MamillaNo ratings yet
- PL - SQL - Quick GuideDocument141 pagesPL - SQL - Quick GuideKavya MamillaNo ratings yet
- Cloud Computing Software As A Service (SaaS)Document5 pagesCloud Computing Software As A Service (SaaS)Kavya MamillaNo ratings yet
- Java Interview QuestionsDocument44 pagesJava Interview QuestionsKavya MamillaNo ratings yet
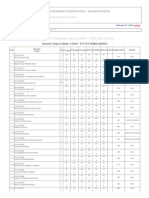
- S W P R April - 2022 (SSC Ossc) : S C N:15346 - Z P H S VemulakotaDocument3 pagesS W P R April - 2022 (SSC Ossc) : S C N:15346 - Z P H S VemulakotaKavya MamillaNo ratings yet
- SQL Interview QuestionsDocument16 pagesSQL Interview QuestionsKavya MamillaNo ratings yet
- DSA Interview QuestionsDocument15 pagesDSA Interview QuestionsKavya MamillaNo ratings yet
- Python Interview QuestionsDocument28 pagesPython Interview QuestionsKavya MamillaNo ratings yet
- Computer Fundamentals - Quick GuideDocument87 pagesComputer Fundamentals - Quick GuideKavya MamillaNo ratings yet
- SQL - Quick GuideDocument163 pagesSQL - Quick GuideKavya MamillaNo ratings yet
- Instructions - While Attending The PLI TestsDocument1 pageInstructions - While Attending The PLI TestsKavya MamillaNo ratings yet
- Prep For Texas Instruments: Who Are We?Document4 pagesPrep For Texas Instruments: Who Are We?Kavya MamillaNo ratings yet
- Selection List Final Jul-22Document12 pagesSelection List Final Jul-22Kavya MamillaNo ratings yet
- Change The World. Love Your Job.: About Texas Instruments India Groups Within TIDocument2 pagesChange The World. Love Your Job.: About Texas Instruments India Groups Within TIKavya MamillaNo ratings yet
- Change The World. Love Your Job.: About Texas Instruments India Groups Within TIDocument2 pagesChange The World. Love Your Job.: About Texas Instruments India Groups Within TIKavya MamillaNo ratings yet
- Ece Pgecet SyllabusDocument2 pagesEce Pgecet SyllabuszakitNo ratings yet
- Accounting Basics - Quick GuideDocument118 pagesAccounting Basics - Quick GuideKavya MamillaNo ratings yet
- Gist of Yojana August 2021Document20 pagesGist of Yojana August 2021Kavya MamillaNo ratings yet
- Syllabus & Weightage of Questions For On-Line Examination ADVERTISEMENT No: 05/2020 Manager (Fire Services)Document9 pagesSyllabus & Weightage of Questions For On-Line Examination ADVERTISEMENT No: 05/2020 Manager (Fire Services)Satya PrakashNo ratings yet
- The Average Distance in A Random GraphDocument22 pagesThe Average Distance in A Random GraphpremNo ratings yet
- C++ Lecture 14Document15 pagesC++ Lecture 14Sagni LamessaNo ratings yet
- A Quick Guide To Understanding The Impact of Test Time On Estimation of Mean Time Between Failure (MTBF)Document7 pagesA Quick Guide To Understanding The Impact of Test Time On Estimation of Mean Time Between Failure (MTBF)ra44993541No ratings yet
- Research Methodology - Multi Variate Analysis 13 10 23Document17 pagesResearch Methodology - Multi Variate Analysis 13 10 23Muthu KumarNo ratings yet
- This Function Solves Linear Equation Systems Such As Ax B Using SOR Method. Sor (A, X, B, W, Max - It, Tol)Document5 pagesThis Function Solves Linear Equation Systems Such As Ax B Using SOR Method. Sor (A, X, B, W, Max - It, Tol)YohannesNo ratings yet
- First Sem 2021 2022-GE 4 - SECOND EXAM - QUESTIONNAIRE (PART 2) Updated As of 2nd Term First Sem 2021 2022Document2 pagesFirst Sem 2021 2022-GE 4 - SECOND EXAM - QUESTIONNAIRE (PART 2) Updated As of 2nd Term First Sem 2021 2022菲希傑Tamayo100% (1)
- EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020Document12 pagesEN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020SAYED JAVED ALI SHAHNo ratings yet
- How To Compute The PSNR (Peak Signal-To-Noise Ratio)Document3 pagesHow To Compute The PSNR (Peak Signal-To-Noise Ratio)sdancer75No ratings yet
- Problem Solving Using Search - (Single Agent Search) : Version 2 CSE IIT, KharagpurDocument14 pagesProblem Solving Using Search - (Single Agent Search) : Version 2 CSE IIT, KharagpurTanmay GoyalNo ratings yet
- No Kadar: Nama: Dio Fikri Rizaldy NPM: 173610786Document7 pagesNo Kadar: Nama: Dio Fikri Rizaldy NPM: 173610786Dio FikriNo ratings yet
- Practice ProblemsDocument4 pagesPractice ProblemsGanesh PeketiNo ratings yet
- Scaled Consensus Tracking Under Constant Time DelayDocument4 pagesScaled Consensus Tracking Under Constant Time Delaytuvantoan17No ratings yet
- The RSA AlgorithmDocument15 pagesThe RSA AlgorithmveenadivyakishNo ratings yet
- The Prisoner'S Dilemma and The Game of Life: Katarzyna ZbiećDocument6 pagesThe Prisoner'S Dilemma and The Game of Life: Katarzyna ZbiećLewis CoatesNo ratings yet
- Data Structure Lab ManualDocument20 pagesData Structure Lab ManualISHITANo ratings yet
- Transportation Problem: A Special Case For Linear Programming ProblemsDocument36 pagesTransportation Problem: A Special Case For Linear Programming ProblemsAlem Abebe AryoNo ratings yet
- Unit 2 Public KeyDocument45 pagesUnit 2 Public KeyAniket ChandaNo ratings yet
- ProbDocument2 pagesProbShreya SinghNo ratings yet
- Probability AssignmentDocument4 pagesProbability AssignmentAbdurrahman KhanNo ratings yet
- Jacob Eisenstein - Natural Language Processing-MIT PressDocument591 pagesJacob Eisenstein - Natural Language Processing-MIT Presskpratik41No ratings yet
- Katharina Tluk v. Toschanowitz, Barbara Hammer and Helge Ritter - Mapping The Design Space of Reinforcement Learning Problems - A Case StudyDocument11 pagesKatharina Tluk v. Toschanowitz, Barbara Hammer and Helge Ritter - Mapping The Design Space of Reinforcement Learning Problems - A Case StudyGrettszNo ratings yet
- Introduction To K-Maps: Boolean AdjacencyDocument4 pagesIntroduction To K-Maps: Boolean AdjacencyJp FiniganNo ratings yet
- Security Constraint Optimal Power Flow (SCOPF) - A Comprehensive SurveyDocument11 pagesSecurity Constraint Optimal Power Flow (SCOPF) - A Comprehensive SurveyEngidaw Abel HailuNo ratings yet
- Journal of Computational Physics: Pierre Lallemand, Li-Shi Luo, Manfred Krafczyk, Wen-An YongDocument52 pagesJournal of Computational Physics: Pierre Lallemand, Li-Shi Luo, Manfred Krafczyk, Wen-An YongLi RexNo ratings yet
- Solved Problem - Critical Path MethodDocument6 pagesSolved Problem - Critical Path MethodDarshan M MNo ratings yet
- Public-Key Cryptography and Message AuthenticationDocument28 pagesPublic-Key Cryptography and Message Authenticationishita chakrabortyNo ratings yet
- Ergodicity Breaking Provably Robust To Arbitrary PerturbationsDocument15 pagesErgodicity Breaking Provably Robust To Arbitrary PerturbationsGB RaghavkrishnaNo ratings yet
- Ross-1973 - Agency Theory, Principal's ProblemDocument7 pagesRoss-1973 - Agency Theory, Principal's ProblemMohsinNo ratings yet
- Presentation A NuDocument45 pagesPresentation A NuRoopa ShreeNo ratings yet
- Application of Partition Function (B)Document2 pagesApplication of Partition Function (B)NITISH KUMARNo ratings yet