You might also like
- Báo Cáo Thí Nghiệm Cơ Sở Điều Khiển & Tự ĐộngDocument73 pagesBáo Cáo Thí Nghiệm Cơ Sở Điều Khiển & Tự ĐộngKhang NguyenNo ratings yet
- Bài thí nghiệm số 4Document9 pagesBài thí nghiệm số 4Ân Nguyễn VănNo ratings yet
- Thiet Ke Theo Tieu Chuan Tich Phan So Iae Itae Ise Itse Ket Hop Voi Dead Beat Khau Dieu Chinh Toc Do Dong Co DC Servo Harmonic rfs32 6018Document16 pagesThiet Ke Theo Tieu Chuan Tich Phan So Iae Itae Ise Itse Ket Hop Voi Dead Beat Khau Dieu Chinh Toc Do Dong Co DC Servo Harmonic rfs32 6018VideoVidNo ratings yet
- 01.boost PHTTDocument28 pages01.boost PHTTpm0412222No ratings yet
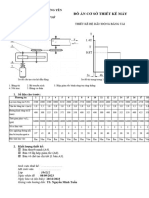
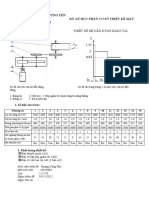
- Đồ Án Cơ Sở Thiết Kế MáyDocument8 pagesĐồ Án Cơ Sở Thiết Kế Máynguyenhongson01062003No ratings yet
- Bài Tập Ví dụ - TDD - Đtinh cơ DC - ACDocument5 pagesBài Tập Ví dụ - TDD - Đtinh cơ DC - ACBùi Đức Huy-DHTD13A1No ratings yet
- Nháp RobotDocument20 pagesNháp RobotjtNo ratings yet
- Tailieunhanh Bai Tap Lon Dieu Khien So 7041Document16 pagesTailieunhanh Bai Tap Lon Dieu Khien So 7041dotkichvdk1810No ratings yet
- Hán Công ĐỉnhDocument59 pagesHán Công ĐỉnhHán Công ĐỉnhNo ratings yet
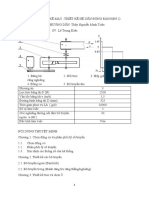
- ************ Thiết Kế Hệ Dẫn Động Băng TảiDocument4 pages************ Thiết Kế Hệ Dẫn Động Băng TảiKim VănNo ratings yet
- Chương 3Document23 pagesChương 3api-3810214100% (2)
- PhamVanBao18151155 Baii 4Document22 pagesPhamVanBao18151155 Baii 4Nam NguyễnNo ratings yet
- CƠ SỞ HTIẾT KẾ MÁY WORD1Document91 pagesCƠ SỞ HTIẾT KẾ MÁY WORD1donglevan0022No ratings yet
- btl thầy thanhDocument21 pagesbtl thầy thanhLong Vũ DuyNo ratings yet
- Banh Rang ThangDocument68 pagesBanh Rang Thangnguyenduyanh127203No ratings yet
- bai tap matlab-đã chuyển đổiDocument12 pagesbai tap matlab-đã chuyển đổiLê.Q Thắng100% (1)
- NỘI DUNG THUYẾT MINHDocument5 pagesNỘI DUNG THUYẾT MINHhungdaiquach63No ratings yet
- Bài 5 GTMDocument14 pagesBài 5 GTMThành Tiến VănNo ratings yet
- Bai 4Document5 pagesBai 4Bùi Văn SỷNo ratings yet
- De Thi HT DKTD HK II 2019 2020 - CLCDocument2 pagesDe Thi HT DKTD HK II 2019 2020 - CLCNhật Lâm Xuân MinhNo ratings yet
- Các bước thiết lập thông số và cấu hình điều khiển DC Servo bằng PLC S7-1200Document8 pagesCác bước thiết lập thông số và cấu hình điều khiển DC Servo bằng PLC S7-1200cuonghuynhjrNo ratings yet
- Báo Cáo CSĐKTĐDocument20 pagesBáo Cáo CSĐKTĐPhùng AnNo ratings yet
- Xe Tu Can BangDocument19 pagesXe Tu Can BangVăn Dương Tiên SinhNo ratings yet
- De1 Solieu4Document8 pagesDe1 Solieu4Thái Quốc HuyNo ratings yet
- Bài Thí Nghiệm 3. Khảo Sát Đặc Tính Động Học Hệ ThốngDocument16 pagesBài Thí Nghiệm 3. Khảo Sát Đặc Tính Động Học Hệ ThốngtrucquynhtudoanNo ratings yet
- Dethi CSKTD Hk202 ĐaDocument6 pagesDethi CSKTD Hk202 ĐaQuách Dũng ThiệuNo ratings yet
- DADocument83 pagesDAChi NguyễnNo ratings yet
- Động cơ R k k J L C G 10 18 1.1 0.3 0.22 55 0.25 10 Phần 1: Thành Lập Phương Trình Toán HọcDocument26 pagesĐộng cơ R k k J L C G 10 18 1.1 0.3 0.22 55 0.25 10 Phần 1: Thành Lập Phương Trình Toán HọcNguyễn KhoaNo ratings yet
- NguyenTuanMInh BTLMRDocument21 pagesNguyenTuanMInh BTLMRNguyễn Tường MinhNo ratings yet
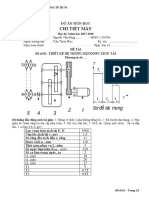
- THIẾT KẾ HỆ THỐNG DẪN ĐỘNG XÍCH TẢIDocument9 pagesTHIẾT KẾ HỆ THỐNG DẪN ĐỘNG XÍCH TẢIThái Quốc Huy0% (1)
- Báo Cáo CSĐKTĐDocument39 pagesBáo Cáo CSĐKTĐDuy Lại NguyễnNo ratings yet
- BC CUỐI KÌDocument21 pagesBC CUỐI KÌ0267Hồ Việt HoàngNo ratings yet
- BM - Bìa Trang Ký Quyển Đồ Án Chi Tiết MáyDocument67 pagesBM - Bìa Trang Ký Quyển Đồ Án Chi Tiết MáyphamquangnamtNo ratings yet
- PID EncoderDocument25 pagesPID EncoderMinh TiếnNo ratings yet
- BC MoHinhHoaMoPhong PDFDocument33 pagesBC MoHinhHoaMoPhong PDF20020595 Phùng Công NghiệpNo ratings yet
- CHƯƠNG 1 Đ Án FinalDocument4 pagesCHƯƠNG 1 Đ Án FinalQuang QuýNo ratings yet
- BAOCAOPBL2Document23 pagesBAOCAOPBL2Thái QuangNo ratings yet
- Đ Án TKM in 9t5Document24 pagesĐ Án TKM in 9t5Văn LongNo ratings yet
- DC DCDocument176 pagesDC DCĐINH ANH TÙNGNo ratings yet
- File Goc 785222Document4 pagesFile Goc 78522220142425No ratings yet
- 1 50trangDocument50 pages1 50trangMạnh ĐặngNo ratings yet
- Mở Đầu Tổng quan về Robot SCARA 1. Giới thiệu về Robot SCARADocument71 pagesMở Đầu Tổng quan về Robot SCARA 1. Giới thiệu về Robot SCARAHưng Trần ĐứcNo ratings yet
- BANTHUYETMINHDocument70 pagesBANTHUYETMINHMạnh QuânNo ratings yet
- Nguyen Vu Anh Khoa - 21146555 - BTL1Document16 pagesNguyen Vu Anh Khoa - 21146555 - BTL1Hoàng PhúcNo ratings yet
- % Cài dàt chu ky lày màu T và thọi giàn mọ phọng TstọpDocument12 pages% Cài dàt chu ky lày màu T và thọi giàn mọ phọng Tstọpquocbao166205No ratings yet
- Dap Ung Tan So DCDocument11 pagesDap Ung Tan So DCbaoduyct2003No ratings yet
- Baocaoso5 Nguyentantai 19151282Document17 pagesBaocaoso5 Nguyentantai 19151282Nguyen AnNo ratings yet
- Bộ biến đổi PFC kiểu BoostDocument24 pagesBộ biến đổi PFC kiểu BoostThọ VũNo ratings yet
- D An CHI TIT MAY HGT 2 CP Khai Trin PDFDocument48 pagesD An CHI TIT MAY HGT 2 CP Khai Trin PDFKim Long VoNo ratings yet
- Bài 1,2 Báo CáoDocument106 pagesBài 1,2 Báo Cáobothm123456789No ratings yet
- Mo Hinh Hoa Dong Co Dien 1 ChieuDocument8 pagesMo Hinh Hoa Dong Co Dien 1 Chieuhoangmai1987No ratings yet
- Bài Thí Nghiệm Số 4 Ứng Dụng Simulink Trong Mô Phỏng Và Đánh Giá Chất Lượng Của Hệ Thống 4.1 Mục đíchDocument42 pagesBài Thí Nghiệm Số 4 Ứng Dụng Simulink Trong Mô Phỏng Và Đánh Giá Chất Lượng Của Hệ Thống 4.1 Mục đíchBảo LongNo ratings yet
- Báo Cáo Bài Tập Lớn TKĐTCS - Vũ Minh Hiếu, Vũ Trọng HậuDocument49 pagesBáo Cáo Bài Tập Lớn TKĐTCS - Vũ Minh Hiếu, Vũ Trọng HậuHiếu VũNo ratings yet
- Báo cáo động cơ điện 1 chiềuDocument15 pagesBáo cáo động cơ điện 1 chiều20020569No ratings yet
- Do An CSTKM Chuong1+2+3+4+5Document73 pagesDo An CSTKM Chuong1+2+3+4+5Nguyễn Văn ThảoNo ratings yet
- PIC Micro Controller Example - QEI - ADC - InTDocument28 pagesPIC Micro Controller Example - QEI - ADC - InTDo Nguyen Tien Thong50% (2)
- TH C HànhDocument24 pagesTH C HànhHoàng Thị ThùyNo ratings yet