You might also like
- Chuong 2. Bài tập xác suấtDocument28 pagesChuong 2. Bài tập xác suấtNguyen Trong KienNo ratings yet
- Câu hỏi ôn tập môn Điều khiển nối mạngDocument5 pagesCâu hỏi ôn tập môn Điều khiển nối mạngem linh100% (1)
- 345502465 Đo va điều khiển tốc độ động cơ dung PLC S7 1200Document18 pages345502465 Đo va điều khiển tốc độ động cơ dung PLC S7 1200Nguyễn Xuân ThanhNo ratings yet
- Sơ Đồ Tư Duy - Cái Nhìn Tổng Quan Về Cực Trị HàmDocument15 pagesSơ Đồ Tư Duy - Cái Nhìn Tổng Quan Về Cực Trị HàmDuy KhuấtNo ratings yet
- Bai Tap - Co Khi Dai Cuong - ME2030Document8 pagesBai Tap - Co Khi Dai Cuong - ME2030Duy KhuấtNo ratings yet
- BÃI ĐỖ XE Thông Minh Xoay Vòng Kiểu ĐứngDocument57 pagesBÃI ĐỖ XE Thông Minh Xoay Vòng Kiểu ĐứngBravo BravoNo ratings yet
- tính toán thiết kế robotDocument18 pagestính toán thiết kế robotNguyen Quang NamNo ratings yet
- Tài Liệu Học Tập Đồ Án Chi Tiết MáyDocument188 pagesTài Liệu Học Tập Đồ Án Chi Tiết MáyLê Danh Tuyên DHCDT13A2HNNo ratings yet
- Báo-Cáo Nhom10Document8 pagesBáo-Cáo Nhom10Vũ HoàngNo ratings yet
- Ôn tập TDHQTSXDocument6 pagesÔn tập TDHQTSXTrường ĐặngNo ratings yet
- Bao CaoDocument38 pagesBao CaoNguyễn Xuân TrườngNo ratings yet
- Bao Cao DKNCDocument68 pagesBao Cao DKNCNam Huỳnh100% (1)
- Nghiên Cứu Tích Hợp Điều Khiển PLC Trong Rô Bốt Công Nghiệp 4 Bậc Tự DoDocument99 pagesNghiên Cứu Tích Hợp Điều Khiển PLC Trong Rô Bốt Công Nghiệp 4 Bậc Tự DoMan EbookNo ratings yet
- THIẾT KẾ MÁY BẮN ĐÁDocument4 pagesTHIẾT KẾ MÁY BẮN ĐÁDươngNo ratings yet
- PHIẾU HỌC TẬP CÁ NHÂNDocument3 pagesPHIẾU HỌC TẬP CÁ NHÂNHoàng Nguyễn CôngNo ratings yet
- Tai Lieu Thi Nghiem Dieu Khien Tu DongDocument31 pagesTai Lieu Thi Nghiem Dieu Khien Tu DongTran VantuanNo ratings yet
- Nhóm 6 - Cơ S Máy CNCDocument16 pagesNhóm 6 - Cơ S Máy CNCQuang VanNo ratings yet
- 4 Toàn S ADocument91 pages4 Toàn S ABùi Bá Đức100% (1)
- Đồ an Nganh Điện Tử Phan Loại Sản Phẩm Dung PLCDocument31 pagesĐồ an Nganh Điện Tử Phan Loại Sản Phẩm Dung PLCtamNo ratings yet
- Nghiên Cứu Thiết Kế Và Chế Tạo Máy Phay Cnc Mini 4 TrụcDocument15 pagesNghiên Cứu Thiết Kế Và Chế Tạo Máy Phay Cnc Mini 4 TrụcHưng TrầnNo ratings yet
- Chuong 4 MẠCH ĐẾM - THANH GHI PDFDocument25 pagesChuong 4 MẠCH ĐẾM - THANH GHI PDFLê Tấn ĐạtNo ratings yet
- Khảo Sát Độ Chính Xác Robot Hàn Khung Vỏ ô TôDocument86 pagesKhảo Sát Độ Chính Xác Robot Hàn Khung Vỏ ô TôMan EbookNo ratings yet
- He Thong Dieu Khien SoDocument39 pagesHe Thong Dieu Khien SoNguyễn Thế QuânNo ratings yet
- Tính Toán Vít Me BiDocument26 pagesTính Toán Vít Me BiMohamet Vuong100% (2)
- TTTK Nhom1 FinalDocument76 pagesTTTK Nhom1 FinalThái Phan HồngNo ratings yet
- Noi Dung Luan Van Chinh Sua Sau Bao VeDocument78 pagesNoi Dung Luan Van Chinh Sua Sau Bao VeSĩ HùngNo ratings yet
- Thiết Kế Hệ Thống Giám Sát Liên Tục Nồng Độ Khí Thải Của Nhà Máy Xi MăngDocument74 pagesThiết Kế Hệ Thống Giám Sát Liên Tục Nồng Độ Khí Thải Của Nhà Máy Xi MăngMan EbookNo ratings yet
- BM NDK - Bai Tap Scada - VD4 PDFDocument12 pagesBM NDK - Bai Tap Scada - VD4 PDFĐức Thuận LýNo ratings yet
- Xe Dò LineDocument2 pagesXe Dò LineTrí Chốt100% (1)
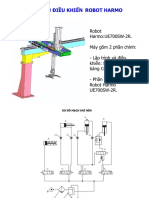
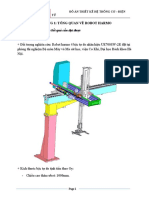
- Robot Harmo - Gui SVDocument19 pagesRobot Harmo - Gui SVNguyễn Duy AnhNo ratings yet
- Báo Cáo Đề Tài:: Thiết Kế, Chế Tạo Bộ Đếm Kết Hợp Cảm Biến Sử Dụng Module Arduino Uno R3Document12 pagesBáo Cáo Đề Tài:: Thiết Kế, Chế Tạo Bộ Đếm Kết Hợp Cảm Biến Sử Dụng Module Arduino Uno R3Lê Minh100% (1)
- Robot TemplateDocument28 pagesRobot TemplateHuy PhạmNo ratings yet
- Điện Công Nghiệp Và Điều Khiển Động Cơ - Phần 1 - 1277969Document155 pagesĐiện Công Nghiệp Và Điều Khiển Động Cơ - Phần 1 - 1277969ĐỗAnhNo ratings yet
- Báo cáo tìm hiểu Robot 3 bánh 10 4 2020Document20 pagesBáo cáo tìm hiểu Robot 3 bánh 10 4 2020Tung HaNo ratings yet
- Chuong 2Document44 pagesChuong 2Lê Công LuậtNo ratings yet
- Rèn dậpDocument19 pagesRèn dậpthiên đào100% (1)
- Báo Cáo Đ Án 2Document26 pagesBáo Cáo Đ Án 2Vũ Mạnh CườngNo ratings yet
- Buoi 3 ve nha 2 BỘ ĐIỀU KHIỂN PIDDocument7 pagesBuoi 3 ve nha 2 BỘ ĐIỀU KHIỂN PIDTrần BảoNo ratings yet
- Đồ án thiết kế hệ thống phân loại sản phẩmDocument42 pagesĐồ án thiết kế hệ thống phân loại sản phẩmLê Hải ĐăngNo ratings yet
- Báo Cáo Thí NghiệmDocument23 pagesBáo Cáo Thí NghiệmNHÂN LÊ HOÀNGNo ratings yet
- Bai Tap Lon Nguyen Ly May1234Document9 pagesBai Tap Lon Nguyen Ly May1234Trần Văn ĐộNo ratings yet
- Bai Tap Dung SaiDocument202 pagesBai Tap Dung SaiLe Thanh HaiNo ratings yet
- Thí nghiệm ĐLHDocument22 pagesThí nghiệm ĐLHMinh AnhNo ratings yet
- Bài tập lớn Robotics - Đại học Bách khoa Hà NộiDocument25 pagesBài tập lớn Robotics - Đại học Bách khoa Hà NộiTRAN LAM TRUONGNo ratings yet
- PHƯƠNG PHÁP GIA CÔNG BẰNG CHÙM ĐIỆN TỬDocument17 pagesPHƯƠNG PHÁP GIA CÔNG BẰNG CHÙM ĐIỆN TỬLê LinhNo ratings yet
- 15.UART S D NG DMADocument8 pages15.UART S D NG DMAMai Trần ThuyếtNo ratings yet
- Đ Án Nhóm 1Document20 pagesĐ Án Nhóm 1Tuấn PhạmNo ratings yet
- Xe T HànhDocument75 pagesXe T HànhThanh PhạmNo ratings yet
- NMDKTM - HK1 - 2021 - Bai Tap Ve Nha 04 PDFDocument3 pagesNMDKTM - HK1 - 2021 - Bai Tap Ve Nha 04 PDFDat DuNo ratings yet
- Bai Giang DKLG - PLC Ee4220 - 1Document100 pagesBai Giang DKLG - PLC Ee4220 - 1ĐăngDũngNo ratings yet
- Bai 1Document14 pagesBai 1Phạm Đức HuyNo ratings yet
- Luu Do Thuat ToanDocument8 pagesLuu Do Thuat ToanTrần Dương QuangNo ratings yet
- AGV xylanh điệnDocument97 pagesAGV xylanh điệnNguyễn Huy ToànNo ratings yet
- Tính Toán Và Thiết Hệ Thống ĐiệnDocument23 pagesTính Toán Và Thiết Hệ Thống Điện[VLVH] Nguyen Van ThangNo ratings yet
- Asm - Giai Đo N 1 (Ac18102)Document24 pagesAsm - Giai Đo N 1 (Ac18102)Béo TiếnNo ratings yet
- BÀI THÍ NGHIỆM 4 PID Auto-tuningDocument3 pagesBÀI THÍ NGHIỆM 4 PID Auto-tuningNgọc NguyễnNo ratings yet
- Báo Cáo Thí Nghiệm Điều Khiển Quá TrìnhDocument49 pagesBáo Cáo Thí Nghiệm Điều Khiển Quá TrìnhĐức Thiện100% (3)
- VoTanDuy TTDocument26 pagesVoTanDuy TTHuy TùngNo ratings yet
- C2 Process Models Part IDocument58 pagesC2 Process Models Part InamanhdkNo ratings yet
- Báo Cáo Bài Tập Lớn Cuối KỳDocument30 pagesBáo Cáo Bài Tập Lớn Cuối Kỳem linhNo ratings yet
- Tai Lieu TN Dieu Khien Qua Trinh-2020Document30 pagesTai Lieu TN Dieu Khien Qua Trinh-2020led lightNo ratings yet
- Cambien5-3 (Sieu Am)Document49 pagesCambien5-3 (Sieu Am)em linhNo ratings yet
- Chủ Đề Lịch Rèn Luyện Kỹ NăngDocument2 pagesChủ Đề Lịch Rèn Luyện Kỹ Năngem linhNo ratings yet
- C5 Feedback Control Analysis-Trang-6Document1 pageC5 Feedback Control Analysis-Trang-6em linhNo ratings yet
- Bao Cao DKQT 1Document37 pagesBao Cao DKQT 1Kỳ ThủNo ratings yet
- Chủ đề Lịch rèn luyện kỹ năngDocument2 pagesChủ đề Lịch rèn luyện kỹ năngem linhNo ratings yet
- Đề bài tập lớn EE3550-trang-3Document1 pageĐề bài tập lớn EE3550-trang-3em linhNo ratings yet
- Bài tập lớn vi mạch tương tự Dùng các vi mạch tương tự tính toán thiết kế mạch đo và cảnh báo nhiệt độ sử dụng cảm biến nhiệt điện trở kim loạiDocument19 pagesBài tập lớn vi mạch tương tự Dùng các vi mạch tương tự tính toán thiết kế mạch đo và cảnh báo nhiệt độ sử dụng cảm biến nhiệt điện trở kim loạiem linhNo ratings yet
- Truờng Đại Học Bách Khoa Hà NộiDocument30 pagesTruờng Đại Học Bách Khoa Hà Nộiem linh100% (1)
- Op AmpDocument28 pagesOp AmpTrần Hữu Đăng KhoaNo ratings yet
- Tailieuxanh Cambien 2 bt1 4994Document1 pageTailieuxanh Cambien 2 bt1 4994em linhNo ratings yet
- Trongtruong So15a 31Document10 pagesTrongtruong So15a 31em linhNo ratings yet
- Tailieuxanh Cambien 2 bt1 4994Document1 pageTailieuxanh Cambien 2 bt1 4994em linhNo ratings yet
- lý thuyết OpAmpDocument23 pageslý thuyết OpAmpOscar Tấn XuânNo ratings yet
- Bao Cao Do An II - Vu Minh HieuDocument3 pagesBao Cao Do An II - Vu Minh Hieuem linhNo ratings yet
- Bài tập lớn vi mạch tương tự Dùng các vi mạch tương tự tính toán thiết kế mạch đo và cảnh báo nhiệt độ sử dụng cảm biến nhiệt điện trở kim loạiDocument19 pagesBài tập lớn vi mạch tương tự Dùng các vi mạch tương tự tính toán thiết kế mạch đo và cảnh báo nhiệt độ sử dụng cảm biến nhiệt điện trở kim loạiem linhNo ratings yet
- Tailieuxanh Levnu0031 02 3297Document69 pagesTailieuxanh Levnu0031 02 3297em linhNo ratings yet
- Bài Tập Lớn Điều Khiển Quá TrìnhDocument15 pagesBài Tập Lớn Điều Khiển Quá Trìnhhaitan981100% (1)
- kỹ thuật cảm biếnDocument15 pageskỹ thuật cảm biếnem linhNo ratings yet
- 751 902 1 PBDocument5 pages751 902 1 PBem linhNo ratings yet
- ReadmeDocument4 pagesReadmeem linhNo ratings yet
- 751 902 1 PBDocument5 pages751 902 1 PBem linhNo ratings yet
- Đề xuất phương án cải tiến sản phẩmDocument2 pagesĐề xuất phương án cải tiến sản phẩmem linhNo ratings yet
- Tỉnh Bình Dương thuộc miềnDocument3 pagesTỉnh Bình Dương thuộc miềnem linhNo ratings yet
- TRƯỜNG ĐẠI HỌC ĐẠI NAM đề số 4Document13 pagesTRƯỜNG ĐẠI HỌC ĐẠI NAM đề số 4em linhNo ratings yet