You might also like
- CMOS Inverter Static CharactersticsDocument47 pagesCMOS Inverter Static CharactersticsIndrajeet GautamNo ratings yet
- MEL ZG621 VLSI DESIGN (Lect 5)Document32 pagesMEL ZG621 VLSI DESIGN (Lect 5)2023ht80200No ratings yet
- CMOS Digital Integrated Circuits Analysis and Design 4th Edition Kang Solutions Manual 1Document24 pagesCMOS Digital Integrated Circuits Analysis and Design 4th Edition Kang Solutions Manual 1james100% (38)
- WINSEM2020-21Document70 pagesWINSEM2020-21Aryaman ChandraNo ratings yet
- Chapter (5) Part (2) (Long Channel MOSFET)Document22 pagesChapter (5) Part (2) (Long Channel MOSFET)Ahmed SalehNo ratings yet
- Differential AmplifierDocument24 pagesDifferential AmplifierT H ChoudhuryNo ratings yet
- Nmos InverterDocument9 pagesNmos InverterlokeshwarrvrjcNo ratings yet
- MOS Transistor - ExerciseDocument22 pagesMOS Transistor - Exercisehasan bishNo ratings yet
- Lecture 1Document17 pagesLecture 1amrsalah40820No ratings yet
- Lecturer On Mos InverterDocument24 pagesLecturer On Mos InvertersoumikbhNo ratings yet
- Inverter NmosDocument124 pagesInverter Nmosapoorva10393No ratings yet
- Power DissipationDocument23 pagesPower DissipationVidhya DsNo ratings yet
- Nil Tarim Spring 2009: Digital Electronic CircuitsDocument8 pagesNil Tarim Spring 2009: Digital Electronic CircuitsneslihanNo ratings yet
- ECE 334 Lecture Chapter 16 InverterDocument20 pagesECE 334 Lecture Chapter 16 InverterSaied Aly SalamahNo ratings yet
- SP07 L13Document17 pagesSP07 L13NITIN NAYANNo ratings yet
- Intro To Mosfets PDFDocument8 pagesIntro To Mosfets PDFGustavoNo ratings yet
- CMOS Inverter: Ankur R ChangelaDocument25 pagesCMOS Inverter: Ankur R ChangelaAnkur PatelNo ratings yet
- Soln Midsem 20Document10 pagesSoln Midsem 20Akul Kumar SinghNo ratings yet
- DC-DC Conveters Lecture 5Document46 pagesDC-DC Conveters Lecture 5AMV STREAMNo ratings yet
- Current Sources and Sinks: V V V V V V VDocument7 pagesCurrent Sources and Sinks: V V V V V V VSyed HyderNo ratings yet
- Switched Capacitor DC-DC Converters: Topologies and ApplicationsDocument25 pagesSwitched Capacitor DC-DC Converters: Topologies and Applicationssaigautham123No ratings yet
- Active LoadDocument69 pagesActive LoadVijay P. LabdeNo ratings yet
- Analog Electronics Lecture-27-21032024Document24 pagesAnalog Electronics Lecture-27-21032024Sayam SanchetiNo ratings yet
- Problems Solution MOSFET at DCDocument9 pagesProblems Solution MOSFET at DCMd. Nymur Rahman HemelNo ratings yet
- Ee 560 Combinational Mos Logic Circuits: Static and Dynamic CharacteristicsDocument56 pagesEe 560 Combinational Mos Logic Circuits: Static and Dynamic Characteristicssachin rajputNo ratings yet
- L040 CS&CEOutputStagesDocument10 pagesL040 CS&CEOutputStagesaramshishmanyanNo ratings yet
- EE42 100 Wb-Lecture16 073113-FDocument42 pagesEE42 100 Wb-Lecture16 073113-FozanistzNo ratings yet
- Chapter 3 - Rectifier Filter ClipperDocument38 pagesChapter 3 - Rectifier Filter ClipperfaizalabdullahNo ratings yet
- Mos Inverters: Static CharacteristicsDocument22 pagesMos Inverters: Static Characteristicskeshav guptaNo ratings yet
- Fet Small Signal Amplifier-Part 3Document20 pagesFet Small Signal Amplifier-Part 3Iqmal HaqimNo ratings yet
- 3.1. Resistive Load Mos Inverter: An ExampleDocument41 pages3.1. Resistive Load Mos Inverter: An Exampleerdem10139No ratings yet
- Chapter Outline: Basic Concept of A CMOS Inverter Power DissipationDocument26 pagesChapter Outline: Basic Concept of A CMOS Inverter Power DissipationAnkur PatelNo ratings yet
- CCH - 8 - Differential and Multistage AmplifierDocument124 pagesCCH - 8 - Differential and Multistage Amplifier鄭又嘉No ratings yet
- Lect 9,10 - MOSFET DC AnalysisDocument17 pagesLect 9,10 - MOSFET DC Analysisshashikala kotiNo ratings yet
- Lab Manual - Exp - 2Document6 pagesLab Manual - Exp - 2ApoorvaNo ratings yet
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- The Inverter The Inverter: ReferencesDocument124 pagesThe Inverter The Inverter: Referencessalman1992No ratings yet
- Analog &digital VLSI DESIGN: Instructor: Dr. Darshak K BhattDocument30 pagesAnalog &digital VLSI DESIGN: Instructor: Dr. Darshak K BhattK.KARTHIKEYAN IYERNo ratings yet
- Pertemuan6 Diode AplcDocument46 pagesPertemuan6 Diode AplcmbloexNo ratings yet
- Electronics Ch15Document21 pagesElectronics Ch15Boudi ChouNo ratings yet
- CS Amplifier With Diode Connected Load 020303Document23 pagesCS Amplifier With Diode Connected Load 020303mayank_parasrampuriaNo ratings yet
- DC-AC Conversion - Lecture 10, 11 and 12Document45 pagesDC-AC Conversion - Lecture 10, 11 and 12madiha100% (1)
- Homework5 SolutionsDocument17 pagesHomework5 SolutionsAijaz Ahmed100% (1)
- Cmos Digital Vlsi Design: Cmos Inverter Basics - IDocument20 pagesCmos Digital Vlsi Design: Cmos Inverter Basics - ISrikanth PasumarthyNo ratings yet
- Ee 560 Mos Inverters: Static Characteristics: ContinuedDocument37 pagesEe 560 Mos Inverters: Static Characteristics: Continuedsachin rajputNo ratings yet
- HCTM Ece StudentsDocument22 pagesHCTM Ece StudentsMunish VermaNo ratings yet
- Cmos Notes PDFDocument32 pagesCmos Notes PDFShwetaGautamNo ratings yet
- Prob 15Document12 pagesProb 15asdfjkl;asdjfkl;No ratings yet
- Experiment No. 1Document53 pagesExperiment No. 1Sumer SainiNo ratings yet
- DC-AC Conversion - Lecture 10Document15 pagesDC-AC Conversion - Lecture 10madihaNo ratings yet
- EEC 140B: MOSFTE: Modern DevicesDocument18 pagesEEC 140B: MOSFTE: Modern DevicesGerardo SanchezNo ratings yet
- Diffamps 1Document60 pagesDiffamps 1Shrinidhi MohanNo ratings yet
- ECE 1312 IIUM L16 FET DC AnalysisDocument20 pagesECE 1312 IIUM L16 FET DC AnalysisFatihah AinaNo ratings yet
- Cmos InverterDocument64 pagesCmos InverterAkashNo ratings yet
- Perhitungan SummingDocument3 pagesPerhitungan Summing1D222YUNITA ABABILNo ratings yet
- Topic 3 - Ac ConverterDocument53 pagesTopic 3 - Ac ConverterUsher Boy Blue WhiteNo ratings yet
- Power Consumption in CMOSDocument33 pagesPower Consumption in CMOSGagandeep Singh DhingraNo ratings yet
- 2012 Date Memory Map PosterDocument4 pages2012 Date Memory Map PosterPrasad M PrasadNo ratings yet
- Assignment 222Document1 pageAssignment 222Prasad M PrasadNo ratings yet
- Q PaperDocument8 pagesQ PaperPrasad M PrasadNo ratings yet
- Question Paper 2009-10Document4 pagesQuestion Paper 2009-10Prasad M PrasadNo ratings yet
- Question PaperDocument4 pagesQuestion PaperPrasad M PrasadNo ratings yet
- Single Stage AmplifierDocument41 pagesSingle Stage AmplifierPrasad M PrasadNo ratings yet
- Design of Analog CMOS Integrated Circuits (Behzad Razavi) MarcadoDocument706 pagesDesign of Analog CMOS Integrated Circuits (Behzad Razavi) MarcadoAminAbed100% (4)
- Ciclotron Tip 4000 h2 IIDocument3 pagesCiclotron Tip 4000 h2 IIcarlos alvaresNo ratings yet
- SSD 9971Document4 pagesSSD 9971Popa GabrielNo ratings yet
- Integrated CircuitDocument5 pagesIntegrated Circuiturwah dzNo ratings yet
- 2 N 2955Document2 pages2 N 2955Antony BurgersNo ratings yet
- Semi-Integrated SOG/TEOS Etchback Process For Multimetal Submicron DevicesDocument4 pagesSemi-Integrated SOG/TEOS Etchback Process For Multimetal Submicron DevicesJohn KikidisNo ratings yet
- Module6 - PVT VariationDocument17 pagesModule6 - PVT Variationdilshan singhNo ratings yet
- = 510 μA. Determine β, α, and iDocument6 pages= 510 μA. Determine β, α, and ib1041049 110-niu-studentNo ratings yet
- SGT40N60FD2PN enDocument9 pagesSGT40N60FD2PN enJeferson TarsoNo ratings yet
- Cmos ThesisDocument144 pagesCmos ThesisSumit Attri100% (2)
- IC Transistors ResistorsDocument17 pagesIC Transistors ResistorsKarthik KoneruNo ratings yet
- Lecture05 Ee474 Layout PDFDocument77 pagesLecture05 Ee474 Layout PDFsridharNo ratings yet
- 2SK30 HKHJHLJKG HFJGJDocument3 pages2SK30 HKHJHLJKG HFJGJpaijo_suladosNo ratings yet
- Unit 3: MOS Electrostatics: The Mobile Charge vs. Gate VoltageDocument22 pagesUnit 3: MOS Electrostatics: The Mobile Charge vs. Gate VoltagealNo ratings yet
- Theory and Fabrication of Integrated CircuitsDocument29 pagesTheory and Fabrication of Integrated CircuitsJomar DadorNo ratings yet
- PMOS NMOS Equations and ExamplesDocument3 pagesPMOS NMOS Equations and ExamplesAhmad ShdifatNo ratings yet
- C200H CPU01-E-03-11 Program Controller Installation ManualDocument159 pagesC200H CPU01-E-03-11 Program Controller Installation ManualcoronaqcNo ratings yet
- Current Components in A Transistor - Electrical4uDocument8 pagesCurrent Components in A Transistor - Electrical4umanoj reddyNo ratings yet
- Nanometrical Devices - MOSFET in Synopsys SentaurusDocument15 pagesNanometrical Devices - MOSFET in Synopsys SentaurusJuan VALVERDENo ratings yet
- Tesla CoilDocument6 pagesTesla CoilKim AffandiNo ratings yet
- Mini ProjectDocument25 pagesMini Projectcharan524No ratings yet
- AUIRFB4610 AUIRFS4610: V 100V R Typ. 11m Max. 14m I 73ADocument13 pagesAUIRFB4610 AUIRFS4610: V 100V R Typ. 11m Max. 14m I 73ATomi OzzyNo ratings yet
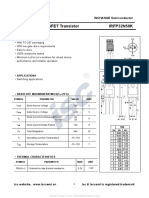
- Isc N-Channel MOSFET Transistor IRFP32N50K: INCHANGE SemiconductorDocument2 pagesIsc N-Channel MOSFET Transistor IRFP32N50K: INCHANGE SemiconductorWilson Yecit OrtizNo ratings yet
- Catalog Componente Depasite (Obsolete)Document2,433 pagesCatalog Componente Depasite (Obsolete)corneliusflavius713257% (7)
- Chapter 3XDocument38 pagesChapter 3XdsaNo ratings yet
- NPN Silicon TransistorDocument1 pageNPN Silicon TransistorSaulo JosiasNo ratings yet
- Sipmos Small-Signal Transistor: GS (TH)Document7 pagesSipmos Small-Signal Transistor: GS (TH)Miloud ChouguiNo ratings yet
- Activity: Silicon Controlled Rectifiers (SCR) - ADALM1000 (Analog Devices Wiki)Document1 pageActivity: Silicon Controlled Rectifiers (SCR) - ADALM1000 (Analog Devices Wiki)Justin OkumuNo ratings yet
- 2016 Ch2-MOS TransistorsDocument47 pages2016 Ch2-MOS Transistorsជើងកាង ភូមិNo ratings yet
- 01 Power ElectronicsDocument134 pages01 Power Electronicspunith gowda75% (4)
- CircuiTikz ManualDocument38 pagesCircuiTikz ManualKonstantinos MamisNo ratings yet