You might also like
- Tính Toán Bộ Truyền Bánh RăngDocument10 pagesTính Toán Bộ Truyền Bánh RăngTrần MinhNo ratings yet
- Baohv HD Tinh Thietke Botruyen Dai 20180710 SuaDocument11 pagesBaohv HD Tinh Thietke Botruyen Dai 20180710 SuaHuỳnh Tấn HuyNo ratings yet
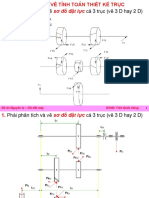
- 4 - Tinh Toan Thiet Ke TRUCDocument8 pages4 - Tinh Toan Thiet Ke TRUCVu Nguyen TruongNo ratings yet
- DACTM - Sai - Sot - Thuong - GapDocument6 pagesDACTM - Sai - Sot - Thuong - GapHùng TốngNo ratings yet
- Đề Cương Ôn Tập Thiết Kế MáyDocument9 pagesĐề Cương Ôn Tập Thiết Kế MáyNguyen Duy DuongNo ratings yet
- HD GearDocument12 pagesHD Geardu.tran05No ratings yet
- 2.chon Dong Co Phan Phoi TST - REV01Document5 pages2.chon Dong Co Phan Phoi TST - REV01Le Dang KhoaNo ratings yet
- 2.chon Dong Co Phan Phoi TST - REV02Document5 pages2.chon Dong Co Phan Phoi TST - REV02khanhvanle2022No ratings yet
- 4.tinh Toan Bo Truyen Banh Rang - REV00Document15 pages4.tinh Toan Bo Truyen Banh Rang - REV00Le Dang KhoaNo ratings yet
- 4 - Tinh Toan Thiet Ke TRUCDocument7 pages4 - Tinh Toan Thiet Ke TRUCtrungNo ratings yet
- CSTKM2 Chuong 2-Bánh Răng-SVDocument38 pagesCSTKM2 Chuong 2-Bánh Răng-SVPhúc ĐỗNo ratings yet
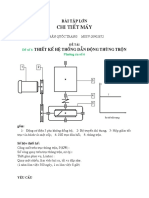
- Thiết Kế Hệ Thống Dẫn Động Băng Tải (Kèm Bản Vẽ Autocad)Document34 pagesThiết Kế Hệ Thống Dẫn Động Băng Tải (Kèm Bản Vẽ Autocad)Tieu Ngoc LyNo ratings yet
- NLMJJJJDocument10 pagesNLMJJJJThanh Sơn NguyễnNo ratings yet
- BANTHUYETMINHDocument70 pagesBANTHUYETMINHMạnh QuânNo ratings yet
- Thiết Kế Hệ Thống Dẫn Động Băng Tải (Đại Học Bách Khoa)Document34 pagesThiết Kế Hệ Thống Dẫn Động Băng Tải (Đại Học Bách Khoa)Tieu Ngoc Ly0% (1)
- Bai Tap 1Document12 pagesBai Tap 1thanhhang020918No ratings yet
- Chuong05 Bo Truyen Xich HK222 2Document33 pagesChuong05 Bo Truyen Xich HK222 2HUY HUỲNH CHÂU QUỐCNo ratings yet
- Chương 9 - TrucDocument44 pagesChương 9 - Trucchuongkm123No ratings yet
- hỏi đáp 2Document21 pageshỏi đáp 2vietictNo ratings yet
- Đồ Án CTM - Nguyễn Hữu DũngDocument71 pagesĐồ Án CTM - Nguyễn Hữu DũngMạnh QuânNo ratings yet
- Tính Toán Bộ Truyền NgoàiDocument6 pagesTính Toán Bộ Truyền NgoàiTrần MinhNo ratings yet
- TÍNH TOÁN BỘ TRUYỀN NGOÀIDocument6 pagesTÍNH TOÁN BỘ TRUYỀN NGOÀIchibao2004dtNo ratings yet
- Dacstkm Nguyễn Anh TuấnDocument43 pagesDacstkm Nguyễn Anh Tuấntrannguyentuan13032003.viettelNo ratings yet
- Hộp số 3 trụcDocument43 pagesHộp số 3 trụcMinh Hiếu VũNo ratings yet
- Chương 2Document27 pagesChương 2Buii PhongNo ratings yet
- Đoàn Bá Linh N7Document31 pagesĐoàn Bá Linh N7Đạt TrầnNo ratings yet
- Chương 12Document16 pagesChương 12leduc24092004No ratings yet
- Đề Cương Dao Động Và Cân Bằng Động Cơ Đốt TrongDocument27 pagesĐề Cương Dao Động Và Cân Bằng Động Cơ Đốt TrongThiện ĐàoNo ratings yet
- Co-So-Thiet-Ke-May - Tran-Thien-Phuc - Bai-Tap-Lon-Chi-Tiet-May - Thiet-Ke-He-Thong-Dan-Dong-Thung-Tron - (Cuuduongthancong - Com)Document8 pagesCo-So-Thiet-Ke-May - Tran-Thien-Phuc - Bai-Tap-Lon-Chi-Tiet-May - Thiet-Ke-He-Thong-Dan-Dong-Thung-Tron - (Cuuduongthancong - Com)Bạch Quang TiếnNo ratings yet
- 6 - TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN BÁNH RĂNG TRỤDocument9 pages6 - TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN BÁNH RĂNG TRỤBùi Ngọc ĐứcNo ratings yet
- 5 - THIẾT KẾ BỘ TRUYỀN XÍCH PDFDocument5 pages5 - THIẾT KẾ BỘ TRUYỀN XÍCH PDFrooter2000bkaNo ratings yet
- Co Ly Thuyet SPKTDocument6 pagesCo Ly Thuyet SPKTHuan TranNo ratings yet
- 1. Bảng tóm tắt thông số thiết kế REV 9.1Document12 pages1. Bảng tóm tắt thông số thiết kế REV 9.1Thái PhiênNo ratings yet
- 2111970 - Võ Tấn Phát - Thuyết minhDocument67 pages2111970 - Võ Tấn Phát - Thuyết minhPHÁT VÕ TẤNNo ratings yet
- BìnhDocument5 pagesBìnhHoàng ĐinhNo ratings yet
- CNCTM Thiet Ket Hop Giam Toc 1 Cap Banh Tru Rang NghiengDocument36 pagesCNCTM Thiet Ket Hop Giam Toc 1 Cap Banh Tru Rang NghiengHoàng ĐứcNo ratings yet
- NLM CuongDocument8 pagesNLM CuongLa Hong LeNo ratings yet
- Thiết kế hệ thống thay dao tự độngDocument44 pagesThiết kế hệ thống thay dao tự độngShaco GVaseNo ratings yet
- Thuyết Minh Đồ Án CSTKMDocument68 pagesThuyết Minh Đồ Án CSTKMThành PhạmNo ratings yet
- 1. Bảng tóm tắt thông số thiết kế REV 9.1Document17 pages1. Bảng tóm tắt thông số thiết kế REV 9.1Trọng Nguyễn BáNo ratings yet
- De Bo Sung Lam MayDocument3 pagesDe Bo Sung Lam MayNhư Cương NguyễnNo ratings yet
- Thuyết Minh HGT 1 cấp răng thẳng 1 xích 1 đaiDocument63 pagesThuyết Minh HGT 1 cấp răng thẳng 1 xích 1 đaiPhong TrươngNo ratings yet
- Đồ án Chi tiết máy :Thiết kế hộp giảm tốc bộ truyền Bánh răng côn răng thẳngDocument61 pagesĐồ án Chi tiết máy :Thiết kế hộp giảm tốc bộ truyền Bánh răng côn răng thẳngquoccuongit91% (11)
- TRẢ LỜI CHO Đồ Án Thiết Kế Tính Toán HỘP SỐDocument10 pagesTRẢ LỜI CHO Đồ Án Thiết Kế Tính Toán HỘP SỐDaddy VõNo ratings yet
- Báo cáo tìm hiểu Robot 3 bánh 10 4 2020Document20 pagesBáo cáo tìm hiểu Robot 3 bánh 10 4 2020Tung HaNo ratings yet
- BÀI TẬP LỚP VI XU LY DIENDocument15 pagesBÀI TẬP LỚP VI XU LY DIENHieu DinhNo ratings yet
- TỔNG HỢP ĐỒ ÁN THẦY HÙNG PDFDocument57 pagesTỔNG HỢP ĐỒ ÁN THẦY HÙNG PDFHoàiLinhNguyễnNo ratings yet
- Tailieuxanh Tran Minh Tu N Copy 1777Document67 pagesTailieuxanh Tran Minh Tu N Copy 1777Cường Bùi MạnhNo ratings yet
- Chương 3Document29 pagesChương 3Đỗ ViệtNo ratings yet
- Huong Dan TKMH CTM - Chuong 4 - TR CDocument35 pagesHuong Dan TKMH CTM - Chuong 4 - TR Ctest dataNo ratings yet
- T2 06Document9 pagesT2 06caokhai132No ratings yet
- De Thi - Dap An Nlchi Tiettmmp230220 CQ-SPKT (30!5!2016)Document7 pagesDe Thi - Dap An Nlchi Tiettmmp230220 CQ-SPKT (30!5!2016)Anh Tuấn TrầnNo ratings yet
- CHM - CHƯƠNG 6. BỘ TRUYỀN BÁNH RĂNGDocument39 pagesCHM - CHƯƠNG 6. BỘ TRUYỀN BÁNH RĂNGtinhkinh58831No ratings yet
- Thuyet Minh Do AnDocument69 pagesThuyet Minh Do AnMrChangsitinhNo ratings yet
- đề 31Document12 pagesđề 31Nam HoàngNo ratings yet
- Chuong 5Document22 pagesChuong 5Nguyen Tuan AnhNo ratings yet
- CH 3 Chuong 3Document75 pagesCH 3 Chuong 3Nguyen Tuan AnhNo ratings yet
- Chuong 6 - Cac Cong Nghe Tao Hinh Dac BietDocument34 pagesChuong 6 - Cac Cong Nghe Tao Hinh Dac BietNguyen Tuan AnhNo ratings yet
- Chuong 2Document120 pagesChuong 2Nguyen Tuan AnhNo ratings yet
- CH 4 Chuong 4Document98 pagesCH 4 Chuong 4Nguyen Tuan AnhNo ratings yet
- Hướng dẫn làm bài dập tấmDocument1 pageHướng dẫn làm bài dập tấmNguyen Tuan AnhNo ratings yet
- De Cuong On Tap CN GCALDocument3 pagesDe Cuong On Tap CN GCALNguyen Tuan AnhNo ratings yet
- Tài liệu tự học Solidwork thiết kế lắp ráp tạo bản vẽ kỹ thuậtDocument87 pagesTài liệu tự học Solidwork thiết kế lắp ráp tạo bản vẽ kỹ thuậtNguyen Tuan AnhNo ratings yet