You might also like
- BT1 CSTD CQ HK221Document4 pagesBT1 CSTD CQ HK221khiemNo ratings yet
- 45Document9 pages45Dương LêNo ratings yet
- 20220913 - Bài tập chương 1 - 2 - D15TDH1 - V1Document3 pages20220913 - Bài tập chương 1 - 2 - D15TDH1 - V1Việt Anh Nguyễn HuyNo ratings yet
- Bai 4 - Dieu Khien Doi Tuong Co TreDocument4 pagesBai 4 - Dieu Khien Doi Tuong Co TreThảo Đỗ Thị ThuNo ratings yet
- 03 Homework #1Document1 page03 Homework #1Lê Thanh TânNo ratings yet
- CỦNG CỐ TOÁN 9- TẬP 2 Về nhàDocument113 pagesCỦNG CỐ TOÁN 9- TẬP 2 Về nhàThương PhạmNo ratings yet
- BT4 CSTD CQ HK221Document3 pagesBT4 CSTD CQ HK221khiemNo ratings yet
- BTC45 CSTDDocument3 pagesBTC45 CSTDThảo Đỗ Thị ThuNo ratings yet
- PID Giam Soc Xe Li Thuyet Đ.KDocument36 pagesPID Giam Soc Xe Li Thuyet Đ.KQui NguyễnNo ratings yet
- (123doc) - Tai-Lieu-Thuc-Hanh-Xu-Ly-Tin-Hieu-SoDocument26 pages(123doc) - Tai-Lieu-Thuc-Hanh-Xu-Ly-Tin-Hieu-SoXuan Duc TranNo ratings yet
- Đề cương ôn tập môn ĐKSDocument3 pagesĐề cương ôn tập môn ĐKSLê Quang TùngNo ratings yet
- 0009 - Nguyễn Minh TrựcDocument44 pages0009 - Nguyễn Minh TrựcDư Nguyễn Trường ThịnhNo ratings yet
- OntapTHVLKT 2020Document8 pagesOntapTHVLKT 2020Trần Trọng TríNo ratings yet
- Môn Tin Học Ứng DụngDocument5 pagesMôn Tin Học Ứng DụngbodaudongrocNo ratings yet
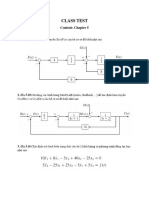
- ClassTest Chapter5Document2 pagesClassTest Chapter5Khoa NguyễnNo ratings yet
- Bài Tập Lớn MatlabDocument2 pagesBài Tập Lớn MatlabDaniel100% (1)
- Trắc Nghiệm Mô PhỏngDocument115 pagesTrắc Nghiệm Mô PhỏngTrần Thị Tuyết Mai - B18DCVT278No ratings yet
- TH C Hành MATLAB PrintDocument27 pagesTH C Hành MATLAB PrintBùi Duy TânNo ratings yet
- Bài Tập Lớn Lý Thuyết Điều Khiển Nâng Cao HK222Document3 pagesBài Tập Lớn Lý Thuyết Điều Khiển Nâng Cao HK222Ngọc NguyễnNo ratings yet
- Bao Cao Doan2Document59 pagesBao Cao Doan2Tùng NguyễnNo ratings yet
- báo cáo tin họcDocument33 pagesbáo cáo tin họcDư Nguyễn Trường ThịnhNo ratings yet
- Matlab Simulink Mô Hình HóaDocument30 pagesMatlab Simulink Mô Hình HóaLê KiênNo ratings yet
- De Cuong Hoc Ky 2 Toan 9 Nam 2022 2023 Truong Thcs Long Toan BR VTDocument9 pagesDe Cuong Hoc Ky 2 Toan 9 Nam 2022 2023 Truong Thcs Long Toan BR VT210453 Lê Hương LanNo ratings yet
- BT Tuần 4 - Phân loại hệ thống, đáp ứng xung, tính tích chậpDocument4 pagesBT Tuần 4 - Phân loại hệ thống, đáp ứng xung, tính tích chậpLong HảiNo ratings yet
- Ứng Dụng Matlab Simulink Nguyễn Huy Việt Anh 2081040060Document41 pagesỨng Dụng Matlab Simulink Nguyễn Huy Việt Anh 2081040060Việt Anh Nguyễn HuyNo ratings yet
- Tin-Hieu-He-Thong (TH HT) Tai Lieu Thuc Hanh 20191 - (Cuuduongthancong - Com)Document29 pagesTin-Hieu-He-Thong (TH HT) Tai Lieu Thuc Hanh 20191 - (Cuuduongthancong - Com)Hoàng ChuNo ratings yet
- Bai Tap MatlabDocument12 pagesBai Tap MatlabHuỳnh Anh Hoàng TúNo ratings yet
- Luyện tậpDocument3 pagesLuyện tậpNgoan NguyễnNo ratings yet
- De Thi - CSTD - HK2 - 1819Document3 pagesDe Thi - CSTD - HK2 - 1819Trà Khánh DuyNo ratings yet
- (123doc) - Thiet-Ke-Va-Mo-Phong-Robot-3d-Tren-Matlab-Kem-Code-MatlabDocument20 pages(123doc) - Thiet-Ke-Va-Mo-Phong-Robot-3d-Tren-Matlab-Kem-Code-Matlabbình nghuyễnNo ratings yet
- MatlabDocument474 pagesMatlabPhạm Trọng ToànNo ratings yet
- Điều khiển thích nghi Robot công nghiệpDocument4 pagesĐiều khiển thích nghi Robot công nghiệppvdaiNo ratings yet
- Đề Cương Ktlt&GtDocument65 pagesĐề Cương Ktlt&GtbuaravietNo ratings yet
- BaocaothuchanhDocument24 pagesBaocaothuchanhvumanhhoach2003No ratings yet
- THTHKT BCDocument28 pagesTHTHKT BCHuỳnh Quang KhôiNo ratings yet
- 03- Thực hành tin học kỹ thuật -BC PDFDocument70 pages03- Thực hành tin học kỹ thuật -BC PDF38 Trường VănNo ratings yet
- Dethi - CSTD - GK1 - 2122 - CQ v2Document3 pagesDethi - CSTD - GK1 - 2122 - CQ v2buithikiemlien12c2No ratings yet
- Bài 1. Tín hiệu và hệ thống rời rạcDocument15 pagesBài 1. Tín hiệu và hệ thống rời rạcMinh LêNo ratings yet
- BT2 CSTD HK212Document3 pagesBT2 CSTD HK212Phúc Thành LạiNo ratings yet
- De Thi 20202Document1 pageDe Thi 20202dang le ducNo ratings yet
- DHGTVT - Huong Dan MatlabDocument15 pagesDHGTVT - Huong Dan MatlabNguyen Huu KhanhNo ratings yet
- Chương 3 MatlabDocument3 pagesChương 3 Matlabkiet.bui1511No ratings yet
- Bai Tap Lon Giai Tich 1 2012Document11 pagesBai Tap Lon Giai Tich 1 2012Bui Huu Binh0% (2)
- Bai Tap DKTDDocument6 pagesBai Tap DKTDNam LêNo ratings yet
- Đề Cương Lý Thuyết Điều Khiển Tự Động - 2023-2024Document9 pagesĐề Cương Lý Thuyết Điều Khiển Tự Động - 2023-2024nguyenhoang312003No ratings yet
- Bai Tap 20190417Document4 pagesBai Tap 20190417Phạm Trần Minh QuânNo ratings yet
- HW. BT Tuần 3 - Đáp ứng xung, tính tích chập - 1Document3 pagesHW. BT Tuần 3 - Đáp ứng xung, tính tích chập - 1Master DoomNo ratings yet
- BTL - Động lực học & Điều khiểnDocument33 pagesBTL - Động lực học & Điều khiểnCHI AN LeNo ratings yet
- ĐỀ CƯƠNG ÔN TẬP LTĐKTĐ 2022 2023Document8 pagesĐỀ CƯƠNG ÔN TẬP LTĐKTĐ 2022 2023Bắc Trần văn100% (2)
- (123doc) - Bai-Tap-Can-Ban-Va-Nang-CaoDocument12 pages(123doc) - Bai-Tap-Can-Ban-Va-Nang-CaoVy Tô Nguyễn TườngNo ratings yet
- BaitapDocument7 pagesBaitapRO ONNo ratings yet
- Thiết Kế Bộ Điều Khiển Đại Số Gia Tử Và Tối Ưu Bằng Giải Thuật Di Truyền Cho Robot Chuỗi Bám Quỹ ĐạoDocument12 pagesThiết Kế Bộ Điều Khiển Đại Số Gia Tử Và Tối Ưu Bằng Giải Thuật Di Truyền Cho Robot Chuỗi Bám Quỹ ĐạoHoàng ViệtNo ratings yet
- DCMH - EE3133 - Electrical Distribution EquipmentDocument6 pagesDCMH - EE3133 - Electrical Distribution EquipmentPhúc Thành LạiNo ratings yet
- SP1037-HK213-NỘI DUNG ÔN TẬP THI CUỐI KỲ MÔN TƯ TƯỞNG HỒ CHÍ MINH-HỆ CQ-CLCDocument1 pageSP1037-HK213-NỘI DUNG ÔN TẬP THI CUỐI KỲ MÔN TƯ TƯỞNG HỒ CHÍ MINH-HỆ CQ-CLCPhúc Thành LạiNo ratings yet
- 05-2022-Đề Cương Mới-tư Tưởng Hồ Chí Minh-sp1037Document18 pages05-2022-Đề Cương Mới-tư Tưởng Hồ Chí Minh-sp1037Dũng Phan ThếNo ratings yet
- Thi-Nghiem-He-Thong-Dien - BCHTD - Trikhanh - (Cuuduongthancong - Com)Document1 pageThi-Nghiem-He-Thong-Dien - BCHTD - Trikhanh - (Cuuduongthancong - Com)Phúc Thành LạiNo ratings yet
- BTL KTKT 221 - 2Document3 pagesBTL KTKT 221 - 2Phúc Thành LạiNo ratings yet
- ATD7 Chongset GuisvDocument12 pagesATD7 Chongset GuisvPhúc Thành LạiNo ratings yet
- Kinh Te Ky Thuat - IM1027 - HK221 - CQDocument5 pagesKinh Te Ky Thuat - IM1027 - HK221 - CQPhúc Thành LạiNo ratings yet
- PDT-02 - Chuyen NganhDocument1 pagePDT-02 - Chuyen NganhPhúc Thành LạiNo ratings yet
- De 121 - 140Document1 pageDe 121 - 140Phúc Thành LạiNo ratings yet
- Yêu cầu Đề TàiDocument1 pageYêu cầu Đề TàiTrung Phụ LêNo ratings yet
- DT05 17Document4 pagesDT05 17Phúc Thành LạiNo ratings yet
- TBD Bang TraDocument19 pagesTBD Bang TraPhúc Thành LạiNo ratings yet
- C3 HTNLX Vd.3 2021 HK211 6sDocument36 pagesC3 HTNLX Vd.3 2021 HK211 6sPhúc Thành LạiNo ratings yet
- Giai BT 3 - Chuong 2Document2 pagesGiai BT 3 - Chuong 2Phúc Thành LạiNo ratings yet
- Giai BT 4 - Chuong 2Document1 pageGiai BT 4 - Chuong 2Phúc Thành LạiNo ratings yet
- 2021 QL QCNDocument6 pages2021 QL QCNtientrung10a2No ratings yet
- BT2 CSTD HK212Document3 pagesBT2 CSTD HK212Phúc Thành LạiNo ratings yet
- Dethi CSTD GK2 2021 L01Document2 pagesDethi CSTD GK2 2021 L01Phúc Thành LạiNo ratings yet
- Tiểu luận - Năng lượng gió - 910221Document20 pagesTiểu luận - Năng lượng gió - 910221Phúc Thành LạiNo ratings yet
- BT ElDocument12 pagesBT ElPhúc Thành LạiNo ratings yet
- 2021 Mo QM1Document3 pages2021 Mo QM1Công Khanh Phạm HoàngNo ratings yet
- Lab 3 ITDocument8 pagesLab 3 ITPhúc Thành LạiNo ratings yet
- Dethi CSTD HK2 2122 DapanDocument6 pagesDethi CSTD HK2 2122 DapanPhúc Thành LạiNo ratings yet
- Chia Nhom BTL L03 L04Document1 pageChia Nhom BTL L03 L04Phúc Thành LạiNo ratings yet
- Năng Lượng Xanh 1.2. Các tác động đến môi trường từ việc khai thác năng lượng 1.2.1. Các tác động đến môi trường từ việc khai thác nhiên liệu hóa thạchDocument5 pagesNăng Lượng Xanh 1.2. Các tác động đến môi trường từ việc khai thác năng lượng 1.2.1. Các tác động đến môi trường từ việc khai thác nhiên liệu hóa thạchPhúc Thành LạiNo ratings yet
- L06 BT4 Luong Nguyen Song ThuongDocument4 pagesL06 BT4 Luong Nguyen Song ThuongPhúc Thành LạiNo ratings yet
- Đề tài Năng lượng xanh - Phần 2 (download tai tailieutuoi.com)Document24 pagesĐề tài Năng lượng xanh - Phần 2 (download tai tailieutuoi.com)Phúc Thành LạiNo ratings yet
- 1.6 Sơ đồ nối đất hạ thếDocument16 pages1.6 Sơ đồ nối đất hạ thếPhúc Thành LạiNo ratings yet
- Họ Và Tên: Đào Quang Huy 1913500 Lại Phúc Thành 2012044 Nguyễn Thái Linh 1711966Document2 pagesHọ Và Tên: Đào Quang Huy 1913500 Lại Phúc Thành 2012044 Nguyễn Thái Linh 1711966Phúc Thành LạiNo ratings yet