You might also like
- Analog Haberleşme Çözümlü Vize SorularıDocument23 pagesAnalog Haberleşme Çözümlü Vize Sorularısefa bilen50% (2)
- Acil 30x12 Limit-Türev-İntegral Deneme (13-20) - B PDFDocument25 pagesAcil 30x12 Limit-Türev-İntegral Deneme (13-20) - B PDFEda NurNo ratings yet
- Acil 30x12 Limit-Türev-İntegral Deneme (2-12) - BDocument35 pagesAcil 30x12 Limit-Türev-İntegral Deneme (2-12) - BMehmetSezgin100% (1)
- Kesit Tesir DiyagramlarıDocument10 pagesKesit Tesir DiyagramlarıOrhan GünsalNo ratings yet
- T Erskine Ma TikDocument22 pagesT Erskine Ma TikIbrahim ÇelikNo ratings yet
- MTitreşimler - 3.hafta-Tek Serbestlik-Sönümsüz-25Document26 pagesMTitreşimler - 3.hafta-Tek Serbestlik-Sönümsüz-25Hasan OğuzNo ratings yet
- Sinyaller Ve Sistemler Sunum-4Document22 pagesSinyaller Ve Sistemler Sunum-4EMRE GÖKGEDİK GÖKGEDİKNo ratings yet
- 2020 2021 Final Thermoeconomic-Analysis-And-Optimization (20210604 A4) DocxDocument2 pages2020 2021 Final Thermoeconomic-Analysis-And-Optimization (20210604 A4) DocxHer şey Hakkında HerşeyNo ratings yet
- MTitreşimler - 4.hafta-Tek Serbestlik-Sönümsüz UYG-48Document48 pagesMTitreşimler - 4.hafta-Tek Serbestlik-Sönümsüz UYG-48Hasan OğuzNo ratings yet
- MTitreşimler - 10.hafta-Çok Serbestlik-Sönümlü+YTS+DDS-20Document21 pagesMTitreşimler - 10.hafta-Çok Serbestlik-Sönümlü+YTS+DDS-20Hasan OğuzNo ratings yet
- 8 Ma'ruzaDocument7 pages8 Ma'ruzahikmatraximov731No ratings yet
- Eks 2122 b5xDocument34 pagesEks 2122 b5xmhuseyink.1093No ratings yet
- Mekanik Tesisat Borularda Isi Kaybi Programi1Document2 pagesMekanik Tesisat Borularda Isi Kaybi Programi1bulabi2000No ratings yet
- Ss Final ButlerDocument92 pagesSs Final ButlerMahir ÖzçelikNo ratings yet
- Kuantum Fiziği Basamak PotansiyeliDocument4 pagesKuantum Fiziği Basamak Potansiyelinejla güler polatNo ratings yet
- 5 Mekani̇k Ti̇treşi̇mlerDocument95 pages5 Mekani̇k Ti̇treşi̇mlersefaNo ratings yet
- Transfer FonksiyonuDocument7 pagesTransfer Fonksiyonuمحمد محمدNo ratings yet
- Kesirli Diferensiyel Denklemler-Fractional Differential EquationsDocument25 pagesKesirli Diferensiyel Denklemler-Fractional Differential EquationsSara MaghsoudiNo ratings yet
- MekTit Ders Notu K1-3-Tek Serbestlik-Sönümlü 18slytDocument19 pagesMekTit Ders Notu K1-3-Tek Serbestlik-Sönümlü 18slytTaha SavacıNo ratings yet
- Signum Tam Değer2 TestDocument4 pagesSignum Tam Değer2 Testjoud mahfouzNo ratings yet
- 2 HaftaDocument2 pages2 HaftaTugce KaraNo ratings yet
- PROSES KONTROL Arasınav Güz2021Document2 pagesPROSES KONTROL Arasınav Güz2021moonie0No ratings yet
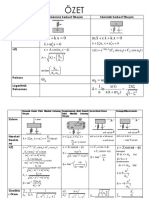
- Mekani̇k Ti̇treşi̇mler Özet TabloDocument3 pagesMekani̇k Ti̇treşi̇mler Özet TabloMehmet AydınNo ratings yet
- Arasınav Çalışma Soruları (2022-2023 Güz)Document5 pagesArasınav Çalışma Soruları (2022-2023 Güz)nurettinmutlu12No ratings yet
- 12 HaftaDocument14 pages12 HaftaTugce KaraNo ratings yet
- MTitreşimler - 5.hafta-Tek Serbestlik-Sönümlü+UYG-36Document37 pagesMTitreşimler - 5.hafta-Tek Serbestlik-Sönümlü+UYG-36Hasan OğuzNo ratings yet
- 47 TürevDocument3 pages47 TürevFatih DurmuşNo ratings yet
- Trigonometri 2Document7 pagesTrigonometri 2sevvallseverr46No ratings yet
- SEY - Euler-Bernoulli Kiriş ProblemleriDocument25 pagesSEY - Euler-Bernoulli Kiriş ProblemleriOscar LyonNo ratings yet
- TTTTTTTTTTTVMNBDocument5 pagesTTTTTTTTTTTVMNBemresnmz95No ratings yet
- SS 80 Z-TransformDocument43 pagesSS 80 Z-TransformMuhammet AliciNo ratings yet
- Sis Mod 2020-2021 Bahar Hw2 TRDocument2 pagesSis Mod 2020-2021 Bahar Hw2 TRad astraNo ratings yet
- 1 GirişDocument4 pages1 Girişömer bağlıNo ratings yet
- Lys Matemati̇k İntegrali̇ Bi̇ti̇ren SorularDocument6 pagesLys Matemati̇k İntegrali̇ Bi̇ti̇ren Sorulareyüp kabaktepeNo ratings yet
- Nümeri̇k İntegralDocument5 pagesNümeri̇k İntegralahmet çolakNo ratings yet
- Fonksiyonlar Konu Anlatımı Testi 1Document12 pagesFonksiyonlar Konu Anlatımı Testi 1sertkalsuphan15No ratings yet
- Hafta Fourier SerileriDocument3 pagesHafta Fourier SerilerisergenNo ratings yet
- MTitreşimler - 9.hafta-Çok Serbestlik-Sönümsüz UYG-35Document36 pagesMTitreşimler - 9.hafta-Çok Serbestlik-Sönümsüz UYG-35Hasan OğuzNo ratings yet
- Formule 2Document5 pagesFormule 2Lavinia BodnarNo ratings yet
- 04 ChapterDocument159 pages04 ChapterKasim PolatNo ratings yet
- Fi̇z101l-Deney 8-2023-2024-Güz Dönemi̇Document12 pagesFi̇z101l-Deney 8-2023-2024-Güz Dönemi̇Arşimet EğinNo ratings yet
- Sut Ve BalDocument7 pagesSut Ve BalIşıl ÇelikNo ratings yet
- Hafta İntegral Yardımıyla Tanımlanan Fonksiyonlar Ve Leibnitz KuralıDocument3 pagesHafta İntegral Yardımıyla Tanımlanan Fonksiyonlar Ve Leibnitz KuralısergenNo ratings yet
- Mod Süperpozisyon Yöntemi-TBDY-2018Document13 pagesMod Süperpozisyon Yöntemi-TBDY-2018ÇağatayNo ratings yet
- A GrubumnDocument4 pagesA Grubumn9v9kcbm429No ratings yet
- 1617guz ArasinavDocument4 pages1617guz Arasinavtalhakiran122No ratings yet
- K 7Document4 pagesK 7ömer bağlıNo ratings yet
- K 8Document4 pagesK 8ömer bağlıNo ratings yet
- Sinif Yaziliya HazirlikDocument6 pagesSinif Yaziliya Hazirlikdundaryagiz38No ratings yet
- Uygulama 23052021Document26 pagesUygulama 23052021Boran BoranNo ratings yet
- İnsaat Muhendisligi 2Document13 pagesİnsaat Muhendisligi 2khaledNo ratings yet
- Mektit ÖdevDocument14 pagesMektit ÖdevBarış TaktakNo ratings yet
- 2006 Öss 2Document7 pages2006 Öss 2pimatemaikNo ratings yet
- Sinyaller Ve Sistemler 1. Bölüm Ödev ÇözümleriDocument2 pagesSinyaller Ve Sistemler 1. Bölüm Ödev ÇözümleriKeremNo ratings yet
- Çalışma SorularıDocument7 pagesÇalışma SorularıFırat IşıkNo ratings yet
- 2-Difference Equation-Turkish Note-Fark Denklemleri-2Document124 pages2-Difference Equation-Turkish Note-Fark Denklemleri-2Sara MaghsoudiNo ratings yet
- Matris Lin DNK 121206Document37 pagesMatris Lin DNK 121206habip inanlıNo ratings yet
- DSA-Neslihan Serap ŞengöDocument90 pagesDSA-Neslihan Serap ŞengöTeknik Hayat0% (1)