You might also like
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Exercise Short Circuit Analysis 2020Document9 pagesExercise Short Circuit Analysis 2020shoptodipNo ratings yet
- EE4533 Tutorial 8 Solutions PDFDocument5 pagesEE4533 Tutorial 8 Solutions PDFcheeling1530No ratings yet
- EE4533 Tutorial 9 Solutions PDFDocument8 pagesEE4533 Tutorial 9 Solutions PDFcheeling1530No ratings yet
- 2.2 ExampleUnbalancedfaultDocument5 pages2.2 ExampleUnbalancedfaultHaekal AkiyatNo ratings yet
- Ee 410 Hw 2 Solution د - يولاجوب دمحأDocument5 pagesEe 410 Hw 2 Solution د - يولاجوب دمحأMohammed DawNo ratings yet
- TET 4115 - 2015.solution To Assignment 3Document5 pagesTET 4115 - 2015.solution To Assignment 3eh2asham1No ratings yet
- Unbalanced Faults PDFDocument36 pagesUnbalanced Faults PDFnafahimNo ratings yet
- Power System Analysis M5 VTUDocument21 pagesPower System Analysis M5 VTUAndrewNo ratings yet
- Tutorial 9solutionn21Document8 pagesTutorial 9solutionn21Daniel ChaiNo ratings yet
- 5.1 Symmetrical Components and Its RequirementDocument13 pages5.1 Symmetrical Components and Its RequirementDharamNo ratings yet
- Tutorial 11solutionn21Document3 pagesTutorial 11solutionn21Daniel ChaiNo ratings yet
- EE251 Note 10 - Computer Solution of Shunt FaultsDocument66 pagesEE251 Note 10 - Computer Solution of Shunt Faults0dz012No ratings yet
- Symmetrical Components I: Dave Angell Idaho Power 21st Annual Hands-On Relay SchoolDocument76 pagesSymmetrical Components I: Dave Angell Idaho Power 21st Annual Hands-On Relay SchoolAhmedNo ratings yet
- Generators in Parallel OperationDocument24 pagesGenerators in Parallel OperationRianne AguilarNo ratings yet
- Chapter 9 Balanced Faults: Fault, and Double-Line-To-Ground Fault. All of These Are Unbalanced Faults. The BalancedDocument6 pagesChapter 9 Balanced Faults: Fault, and Double-Line-To-Ground Fault. All of These Are Unbalanced Faults. The BalancedJontelli SimonNo ratings yet
- AC Circuit Analysis HandoutDocument11 pagesAC Circuit Analysis HandoutAyedh AlqahtaniNo ratings yet
- AC Voltage Controllers: AC To Ac ConvertersDocument20 pagesAC Voltage Controllers: AC To Ac ConvertersDuy Bùi Thế MinhNo ratings yet
- Unsymmetrical Fault AnalysisDocument22 pagesUnsymmetrical Fault AnalysissujapsgNo ratings yet
- Review Seluruh Materi Transformator: Teknik Elektro Universitas GunadarmaDocument46 pagesReview Seluruh Materi Transformator: Teknik Elektro Universitas GunadarmabayuindraNo ratings yet
- HS STL AsimetrisDocument27 pagesHS STL AsimetrisAdien GumilangNo ratings yet
- 1 4 Fault Analysis Tutorial Unbalanced FDocument4 pages1 4 Fault Analysis Tutorial Unbalanced FWilliams EspinozaNo ratings yet
- Geometry of The Transformer Phasor DiagramDocument9 pagesGeometry of The Transformer Phasor DiagramJeans GonzalezNo ratings yet
- Chapter 6 - Two-Port NetworkDocument35 pagesChapter 6 - Two-Port NetworkAnonymous 20Uv9c2No ratings yet
- Tutorial 3 - July 2010Document9 pagesTutorial 3 - July 2010Kim KeatNo ratings yet
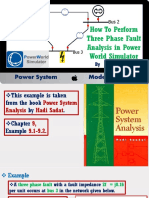
- Modelling of Fault Analysis in Power World SimulatorDocument18 pagesModelling of Fault Analysis in Power World SimulatorAnantShrivastavaNo ratings yet
- B 31290735Document75 pagesB 31290735chibssa alemayehuNo ratings yet
- Sinusoidal Voltage - Non Sinusoidal Current ProblemDocument2 pagesSinusoidal Voltage - Non Sinusoidal Current ProblemChihiya Fitria NurhayatiNo ratings yet
- ECE 476 Power System Analysis: Lecture 21: Unbalanced Faults, ProtectionDocument31 pagesECE 476 Power System Analysis: Lecture 21: Unbalanced Faults, ProtectionsohaibNo ratings yet
- The Balanced Three-Phase Fault: D Firas Mohamme - DR Power Year Electrical 4Document8 pagesThe Balanced Three-Phase Fault: D Firas Mohamme - DR Power Year Electrical 4Ahmad AliNo ratings yet
- Ste - Week 7 PerhitunganDocument29 pagesSte - Week 7 PerhitunganEstika Vriscilla GintingNo ratings yet
- Chapter9 Unsymmetrical FaultsDocument64 pagesChapter9 Unsymmetrical Faultsoadipphone7031No ratings yet
- AC Machine Lecture No2Document28 pagesAC Machine Lecture No2Mohammed Dyhia AliNo ratings yet
- EE3726 - Chapter 10 - Sinusoidal Steady State AnalysisDocument16 pagesEE3726 - Chapter 10 - Sinusoidal Steady State AnalysisTrần Minh ĐứcNo ratings yet
- 13 Transformer ContDocument12 pages13 Transformer ContHusseinZyoudNo ratings yet
- Chapter 10 Sym Comp and Unbalanced FaultDocument45 pagesChapter 10 Sym Comp and Unbalanced FaultjaysonlkhNo ratings yet
- Example 7: D Firas Mohamme Dr. Power Year Electrical 4Document15 pagesExample 7: D Firas Mohamme Dr. Power Year Electrical 4Ahmad AliNo ratings yet
- สื่อบรรยาย 01026212 Feb 21 2018Document35 pagesสื่อบรรยาย 01026212 Feb 21 2018Wid SiritananNo ratings yet
- Lecture 5Document5 pagesLecture 5none. xNo ratings yet
- Unbalanced Fault of GeneratorDocument13 pagesUnbalanced Fault of GeneratorAlung GuntoroNo ratings yet
- Exp 1Document10 pagesExp 1Arpan GayenNo ratings yet
- AC Circuit Analysis - KVL - KCLDocument24 pagesAC Circuit Analysis - KVL - KCLjenniferNo ratings yet
- Chapter 2 Problems Solutions: 2.1 The Network Input Impedance Is Given byDocument18 pagesChapter 2 Problems Solutions: 2.1 The Network Input Impedance Is Given bycluisyNo ratings yet
- L02 Feedback AmplifiersDocument37 pagesL02 Feedback Amplifiersabdeee4000No ratings yet
- IRS2304 and IR2304 ComparisonDocument7 pagesIRS2304 and IR2304 ComparisonGiraldoCarpioRamosNo ratings yet
- Practical 05Document32 pagesPractical 05anuj jainNo ratings yet
- Homework 3Document3 pagesHomework 3Houseman74No ratings yet
- Electrical EngineeringDocument46 pagesElectrical EngineeringRaja AbbasNo ratings yet
- Chapter 4 TransformersDocument37 pagesChapter 4 TransformersMostafa MongyNo ratings yet
- Power System Lab2Document9 pagesPower System Lab2faisalbanNo ratings yet
- Symmetrical Components, Networ Sequence, and FaultsDocument33 pagesSymmetrical Components, Networ Sequence, and FaultsAhmed SabriNo ratings yet
- Ee310 Sol BJTDocument7 pagesEe310 Sol BJTBanupriya-No ratings yet
- DirectionalDocument14 pagesDirectionalavgNo ratings yet
- Slides of Lecture5Document26 pagesSlides of Lecture5rudra patraNo ratings yet
- 6.2 & 6.3 MESH & NODE Analysis KKKDocument4 pages6.2 & 6.3 MESH & NODE Analysis KKKcutiesfunnypetNo ratings yet
- Bee Midterm ProjectDocument9 pagesBee Midterm ProjectMARIA RHODORA BITBITNo ratings yet
- Fiitjee All India Test Series: Concept Recapitulation Test - IiiDocument17 pagesFiitjee All India Test Series: Concept Recapitulation Test - IiiShreya DesaiNo ratings yet
- Experiment 01 Plotting The VI Characteristics of Silicon DiodeDocument3 pagesExperiment 01 Plotting The VI Characteristics of Silicon Diodeshahid rasheedNo ratings yet
- Application Note AN-1108: IRS2111 and IR2111 ComparisonDocument7 pagesApplication Note AN-1108: IRS2111 and IR2111 ComparisonadiNo ratings yet
- Exper-10 Digital Comparator CircuitDocument5 pagesExper-10 Digital Comparator CircuitMohammed Dyhia AliNo ratings yet
- Physics ProjectDocument5 pagesPhysics ProjectPrajvi0% (1)
- Discrete Functions MCR3U Unit 8 (May 2015)Document18 pagesDiscrete Functions MCR3U Unit 8 (May 2015)Shanaz ParsanNo ratings yet
- 170 Python ProjectsDocument15 pages170 Python Projectsrajeswari.bommanaboinaNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product SpecificationSsr ShaNo ratings yet
- Statistical Signal Processing: ECE 5615 Lecture Notes Spring 201 9Document32 pagesStatistical Signal Processing: ECE 5615 Lecture Notes Spring 201 9rizwanNo ratings yet
- DLL 10-11Document5 pagesDLL 10-11LORIBELLE MALDEPENANo ratings yet
- Aip 2023 San Diego Elementary School 121172 Leo Robedillo FinalDocument10 pagesAip 2023 San Diego Elementary School 121172 Leo Robedillo Finalruskyjeth16No ratings yet
- FPH-HP Install Manual V2.8Document38 pagesFPH-HP Install Manual V2.8steve67% (3)
- 50 Foundational Principles For Managing Projects 1698788014Document51 pages50 Foundational Principles For Managing Projects 1698788014Olivier RachoinNo ratings yet
- Synthetic Hi-Temp GreaseDocument1 pageSynthetic Hi-Temp GreasetariNo ratings yet
- EMRAX 188 Datasheet A00Document2 pagesEMRAX 188 Datasheet A00vicon16138No ratings yet
- Problem Solving & Root Cause AnalysisDocument8 pagesProblem Solving & Root Cause AnalysisPermanapurba100% (1)
- Natural and Artificial Rockslide DamsDocument649 pagesNatural and Artificial Rockslide DamsCarlos Augusto Sánchez RondónNo ratings yet
- Application of Six Sigma With Respect To Abbott Laboratories.Document17 pagesApplication of Six Sigma With Respect To Abbott Laboratories.NITIN SINGHNo ratings yet
- Lesson Presentation Risk Identification: Prepared By: Jamaal T. Villapaña, MBADocument5 pagesLesson Presentation Risk Identification: Prepared By: Jamaal T. Villapaña, MBAJolina PahayacNo ratings yet
- Teaching AssignmentDocument7 pagesTeaching Assignment9pk8kk69jsNo ratings yet
- Media PsychologyDocument38 pagesMedia PsychologyDr R Ravi KumarNo ratings yet
- Samwel Kipkorir YegonDocument77 pagesSamwel Kipkorir YegonSOULAIMANE EZZOUINENo ratings yet
- Cross Wallpaper Iphone - Google SearchDocument1 pageCross Wallpaper Iphone - Google SearchWill ThompsonNo ratings yet
- Tutorial CMMIDocument256 pagesTutorial CMMIsanthikumargNo ratings yet
- Lec 3 Precision Measuring Instrument PDFDocument20 pagesLec 3 Precision Measuring Instrument PDFUmair MalikNo ratings yet
- C250i C300i C360i Product GuideDocument40 pagesC250i C300i C360i Product GuideAndrzej OzięblewskiNo ratings yet
- List of Pre-Owned Vehicles For Sale - 09.23.22Document21 pagesList of Pre-Owned Vehicles For Sale - 09.23.22adFWSVNo ratings yet
- 10de Tieng AnhDocument144 pages10de Tieng AnhSix HoàngNo ratings yet
- Evaluation of Tenders and Selection of Preferred BidderDocument3 pagesEvaluation of Tenders and Selection of Preferred Biddercute_prabudassNo ratings yet
- MSCI ResponseDocument6 pagesMSCI Responseusman.naeemm1No ratings yet
- AP European History 2005 Free-Response Questions Form B: The College Board: Connecting Students To College SuccessDocument9 pagesAP European History 2005 Free-Response Questions Form B: The College Board: Connecting Students To College SuccessRich SevillaNo ratings yet
- 4 91 1 Air ServiceDocument32 pages4 91 1 Air ServiceAntony MorenoNo ratings yet
- Globalization: Chapter 2, Sec 4 Social StudiesDocument143 pagesGlobalization: Chapter 2, Sec 4 Social StudiesJoel CerezoNo ratings yet