You might also like
- TÍNH TOÁN VÍT ME ĐAI ỐC BIDocument14 pagesTÍNH TOÁN VÍT ME ĐAI ỐC BIShaco GVase100% (1)
- THUYẾT MINH TÍNH TOÁN GÔNG CẨU MC175CDocument4 pagesTHUYẾT MINH TÍNH TOÁN GÔNG CẨU MC175CNguyễn Hữu BìnhNo ratings yet
- Jig GaDocument8 pagesJig GaNguyễn Duy ThànhNo ratings yet
- Chuong 3 KEP CHAT VA CO CAU KEP CHATDocument21 pagesChuong 3 KEP CHAT VA CO CAU KEP CHATMinh HàNo ratings yet
- (123doc) - Tinh-Toan-Va-Thiet-Ke-Do-GaDocument6 pages(123doc) - Tinh-Toan-Va-Thiet-Ke-Do-GaQuân LêNo ratings yet
- BÀI TẬP LỚN VỀ ĐỒ GÁ - 687246Document12 pagesBÀI TẬP LỚN VỀ ĐỒ GÁ - 687246Thiết ĐàoNo ratings yet
- bài tập lớn đồ gáDocument8 pagesbài tập lớn đồ gátranvanmanh30082003No ratings yet
- THUYẾT MINHDocument10 pagesTHUYẾT MINHQuang TrườngNo ratings yet
- lực kẹpDocument3 pageslực kẹpLe Xuan HuyNo ratings yet
- Chuong IV. Truc Khuyu - Banh DaDocument54 pagesChuong IV. Truc Khuyu - Banh DaLong NguyễnNo ratings yet
- Thiết kế đồ gáDocument9 pagesThiết kế đồ gáNguyen Manh Duc100% (1)
- 01-LyThuyet - 1den4-Đã G PDocument67 pages01-LyThuyet - 1den4-Đã G PPhạm Trọng ThứcNo ratings yet
- ĐỀ CƯƠNG ĐỒ GÁDocument25 pagesĐỀ CƯƠNG ĐỒ GÁAnh Quân CulesNo ratings yet
- Chi Tiet May 03. Xac Dinh He So Xiet Tren Moi Ghep Ren (Cuuduongthancong - Com)Document9 pagesChi Tiet May 03. Xac Dinh He So Xiet Tren Moi Ghep Ren (Cuuduongthancong - Com)minh thi lương trầnNo ratings yet
- 03. Xác Định Hệ Số Xiết Trên Mối Ghép RenDocument9 pages03. Xác Định Hệ Số Xiết Trên Mối Ghép RenNguyễn Nhựt TânNo ratings yet
- 02. Xác định lực kéo đứt bulongDocument13 pages02. Xác định lực kéo đứt bulongQuốc Trí LêNo ratings yet
- Chuyển vị của dầm chịu uốnDocument18 pagesChuyển vị của dầm chịu uốnlionkidsNo ratings yet
- Chuong 7 - Truc - 2022Document14 pagesChuong 7 - Truc - 202204 Phan Thế AnhNo ratings yet
- Công TH C KCTDocument31 pagesCông TH C KCTton an khangNo ratings yet
- 3.CHCT-Nội lực trong hệ tĩnh định (Compatibility Mode)Document60 pages3.CHCT-Nội lực trong hệ tĩnh định (Compatibility Mode)Trần Nhật HoàngNo ratings yet
- Nhóm 9Document77 pagesNhóm 9Công NgôNo ratings yet
- Huong Dan DACN-5Document30 pagesHuong Dan DACN-5Nhân NguyễnNo ratings yet
- C5 Cdio VPDocument24 pagesC5 Cdio VPKhue2002 NguyenNo ratings yet
- BTL 41Document14 pagesBTL 41du.tran05No ratings yet
- CSTKMQLDocument29 pagesCSTKMQLLâm Đặng100% (1)
- BÀI TẬP LỚN ĐỒ GÁDocument12 pagesBÀI TẬP LỚN ĐỒ GÁdai1905202No ratings yet
- 07 CTM TR CDocument34 pages07 CTM TR CNguyễn Nhật TânNo ratings yet
- KhanangchiucatcuadamnoitrongketcauloinhacaotangtheoTCVN55742018 NTC DXQDocument4 pagesKhanangchiucatcuadamnoitrongketcauloinhacaotangtheoTCVN55742018 NTC DXQTrần Minh ThuậnNo ratings yet
- PHẦN VIIIDocument7 pagesPHẦN VIIINghiax TVNo ratings yet
- Tinh Cau TrucDocument3 pagesTinh Cau TrucThắngg TrịnhhNo ratings yet
- Sức Bền Vật Liệu 1: Giảng Viên: Ts. Nguyễn Tất ThắngDocument21 pagesSức Bền Vật Liệu 1: Giảng Viên: Ts. Nguyễn Tất ThắngViệt Trinh (chin)No ratings yet
- 3.CHCT-Nội lực trong hệ tĩnh địnhDocument60 pages3.CHCT-Nội lực trong hệ tĩnh địnhnekoNo ratings yet
- Tinh Toan Cot Thep XienDocument6 pagesTinh Toan Cot Thep XienDỹ Bùi TuấnNo ratings yet
- Bài 5 Đ Án CTMDocument14 pagesBài 5 Đ Án CTML & NNo ratings yet
- Truc Hop So Xe TaiDocument8 pagesTruc Hop So Xe TaiNguyễn NhânNo ratings yet
- Chuong 7-TrucDocument16 pagesChuong 7-TrucNguyễn Minh HảoNo ratings yet
- Chương 3Document29 pagesChương 3Đỗ ViệtNo ratings yet
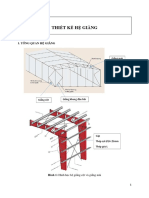
- 1.2 - Thiết kế hệ giằngDocument6 pages1.2 - Thiết kế hệ giằngHuy Truong Nguyen GiaNo ratings yet
- tính bền trục khuỷu bánh đàDocument9 pagestính bền trục khuỷu bánh đàTuấn TrungNo ratings yet
- Chuong 5 Truc ThenDocument16 pagesChuong 5 Truc ThenTrọng Nguyễn Bá100% (1)
- C1 - P2. Tải trọng.Document37 pagesC1 - P2. Tải trọng.Hùng Cường TrầnNo ratings yet
- May MaiDocument77 pagesMay Maiad adNo ratings yet
- Chương 4-Độ Bền Của Chi Tiết MáyDocument18 pagesChương 4-Độ Bền Của Chi Tiết MáyVăn Tuân NguyễnNo ratings yet
- BG C04 CVDCB 2014Document11 pagesBG C04 CVDCB 2014Tâm PhanNo ratings yet
- Sức bền vật liệu - Chương 1Document19 pagesSức bền vật liệu - Chương 1Chiến PhanNo ratings yet
- TDD2Document8 pagesTDD2accads111No ratings yet
- Chương V: Thiết Kế Trục Và Tính ThenDocument17 pagesChương V: Thiết Kế Trục Và Tính ThenNguyễn Văn ThànhNo ratings yet
- Chương 2-3Document15 pagesChương 2-3voanhkiem.32No ratings yet
- Đặng Hoàng HiệpDocument12 pagesĐặng Hoàng HiệpKevin NguyễnNo ratings yet
- Tính toán sử dụng các thiết bị nâng chuyển - Phạm Huy Chính PDFDocument142 pagesTính toán sử dụng các thiết bị nâng chuyển - Phạm Huy Chính PDFPhu DoNo ratings yet
- eBook Tính Toán Sử Dụng Các Thiết Bị Nâng Chuyển Phần 1 - Phạm Huy ChínhDocument84 pageseBook Tính Toán Sử Dụng Các Thiết Bị Nâng Chuyển Phần 1 - Phạm Huy ChínhQuốc TườngNo ratings yet
- Chuong 7Document63 pagesChuong 715-Vũ Đình ĐạtNo ratings yet
- Chương 9 - TrucDocument44 pagesChương 9 - Trucchuongkm123No ratings yet
- BTCT1 - Baitap T12-2020Document29 pagesBTCT1 - Baitap T12-2020Nguyễn Trường PhấnNo ratings yet
- Phầ8YUDocument12 pagesPhầ8YUdangthanh1932k4No ratings yet
- Chapt 6Document26 pagesChapt 6phuNo ratings yet
- SBVL Xoan NewDocument28 pagesSBVL Xoan NewncuonzNo ratings yet
- DapAn Ketcaucongtrinhthep HKII2018-2019Document5 pagesDapAn Ketcaucongtrinhthep HKII2018-2019abccNo ratings yet