You might also like
- Bai04 - các Khâu Động Học Cơ BảnDocument15 pagesBai04 - các Khâu Động Học Cơ BảnPhạm Đình VõNo ratings yet
- Chương 2 - K64Document70 pagesChương 2 - K64Lộc TrầnNo ratings yet
- Lý Thuyết - Tín HiệuDocument21 pagesLý Thuyết - Tín HiệuDau DanhNo ratings yet
- MI1121 - Giải tích 2 Nhóm 1 - Đề cương Bài tập (01.2020)Document14 pagesMI1121 - Giải tích 2 Nhóm 1 - Đề cương Bài tập (01.2020)tomNo ratings yet
- Đồ án Thiết kế hệ thống cơ điện tử Thiết kế robot SCARA vận chuyển sản phẩm Mã học phần: ME5512Document37 pagesĐồ án Thiết kế hệ thống cơ điện tử Thiết kế robot SCARA vận chuyển sản phẩm Mã học phần: ME5512An DoNo ratings yet
- CÔNG THỨC VẬT LÝ 11 HK1 Chương DAO ĐỘNG & SÓNGDocument12 pagesCÔNG THỨC VẬT LÝ 11 HK1 Chương DAO ĐỘNG & SÓNGKhánh Vinh NguyễnNo ratings yet
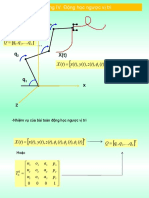
- Chuong 4 Dong Hoc NguocDocument39 pagesChuong 4 Dong Hoc NguocMaianh TranNo ratings yet
- Ky Thuat Xung - Bai Tap PDFDocument18 pagesKy Thuat Xung - Bai Tap PDFVo Dinh VuNo ratings yet
- Chuong 2 Bai 1Document41 pagesChuong 2 Bai 1Nguyễn Đức LongNo ratings yet
- 8e811 50892Document25 pages8e811 50892DUC TRUONGNo ratings yet
- Slide LTM - C345 PtitDocument62 pagesSlide LTM - C345 Ptittrinhpt10424No ratings yet
- Vật Lý Đại Cương Ôn CKDocument4 pagesVật Lý Đại Cương Ôn CKhoài an lê thịNo ratings yet
- Dap An LTDKTD 111Document29 pagesDap An LTDKTD 111LongNo ratings yet
- Báo Cáo TH C HànhDocument15 pagesBáo Cáo TH C HànhNguyễn Quang MinhNo ratings yet
- Dong Lucho C Can H Tay Robot TTRDocument11 pagesDong Lucho C Can H Tay Robot TTRsegourney7419635.vnNo ratings yet
- Tin Hiu H THNG 1Document14 pagesTin Hiu H THNG 1Thái VũNo ratings yet
- Ilovepdf MergedDocument33 pagesIlovepdf MergedTrần ThăngNo ratings yet
- ĐC LýDocument7 pagesĐC Lýhoài an lê thịNo ratings yet
- De Cuong 12khxh - hk1 - HsDocument75 pagesDe Cuong 12khxh - hk1 - Hsle HOANCAUNo ratings yet
- PHƯƠNG PHÁP DÙNG TÍCH PHÂN TRONG BÀI TOÁN VẬT LÝDocument14 pagesPHƯƠNG PHÁP DÙNG TÍCH PHÂN TRONG BÀI TOÁN VẬT LÝNguyễn Mã SinhNo ratings yet
- Lý thuyết - Tín hiệuDocument23 pagesLý thuyết - Tín hiệuGia Cương LêNo ratings yet
- Báo Cáo TH C HànhDocument20 pagesBáo Cáo TH C HànhDuy Văn NguyễnNo ratings yet
- 6. Đề cương ôn thi LTĐKTĐDocument7 pages6. Đề cương ôn thi LTĐKTĐTuấn AnhNo ratings yet
- ÔN TẬP THHTDocument140 pagesÔN TẬP THHTĐạt HuỳnhNo ratings yet
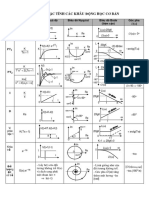
- Bang Tom Tat Dac Tinh Cac Khau Dong Hoc Co BanDocument1 pageBang Tom Tat Dac Tinh Cac Khau Dong Hoc Co BanPhạm Hữu KỳNo ratings yet
- Chuong 3Document35 pagesChuong 3Châu Nguyễn Châu Trần BảoNo ratings yet
- đề bài tập lớnDocument2 pagesđề bài tập lớnkhkpr9ky8yNo ratings yet
- DDDHDocument62 pagesDDDHLẬP NGUYỄN TẤNNo ratings yet
- Vật Lý BTLDocument8 pagesVật Lý BTLThanh PhuNo ratings yet
- LêCôngViệtAnh 22021503 NguyễnVănDuy 22021530Document21 pagesLêCôngViệtAnh 22021503 NguyễnVănDuy 22021530Duy Văn NguyễnNo ratings yet
- NH Màn Hình 2022-04-04 Lúc 14.30.56Document37 pagesNH Màn Hình 2022-04-04 Lúc 14.30.56Tuấn Kiệt ĐinhNo ratings yet
- Nguyễn Tiến Hưng 20186050 KDDH 22.06.2022Document10 pagesNguyễn Tiến Hưng 20186050 KDDH 22.06.2022Hưng PilotNo ratings yet
- Dieu Che AMDocument5 pagesDieu Che AMNguyễn Tuấn CườngNo ratings yet
- Bài tập Phương trình vi phânDocument36 pagesBài tập Phương trình vi phânthienlong1707No ratings yet
- Tuyến tính cấp 2Document1 pageTuyến tính cấp 2Phát NguyễnNo ratings yet
- Tổng Hợp Các Công Thức Vật Lí 12 Cơ BảnDocument11 pagesTổng Hợp Các Công Thức Vật Lí 12 Cơ Bảnanh thưNo ratings yet
- Homework DRT NVD 2,3Document116 pagesHomework DRT NVD 2,3Vĩnh- B19DCVT442 Nguyễn VănNo ratings yet
- Chapter 1 - Quá Trình Quá ĐộDocument31 pagesChapter 1 - Quá Trình Quá Độthanhcong442004No ratings yet
- DAO ĐỘNG -ĐỒ THỊDocument17 pagesDAO ĐỘNG -ĐỒ THỊThanh Minh LêNo ratings yet
- GT Chương 1 Ôn Thi 2020 2021Document60 pagesGT Chương 1 Ôn Thi 2020 2021Linh Nguyễn Thị KhánhNo ratings yet
- HomeWork - DRT - NVD 2,3 PDFDocument115 pagesHomeWork - DRT - NVD 2,3 PDFLipton IceTeaNo ratings yet
- 1 SNS Ch3 P3Document8 pages1 SNS Ch3 P3SÁNG QUANGNo ratings yet
- Đề Cương Ôn Tập Toán Kỹ ThuậtDocument12 pagesĐề Cương Ôn Tập Toán Kỹ ThuậtLong HoangNo ratings yet
- Bài Làm FourierDocument17 pagesBài Làm FourierSang Vũ MinhNo ratings yet
- Ôn Lý Đại Cương Cuối KỳDocument7 pagesÔn Lý Đại Cương Cuối Kỳhoài an lê thịNo ratings yet
- Dap An BTCC Buoi 1Document47 pagesDap An BTCC Buoi 1Kỳ TrầnNo ratings yet
- Bài Làm FourierDocument17 pagesBài Làm FourierSang Vũ MinhNo ratings yet
- Final CO2011 VI 2022 213 268x With KeysDocument25 pagesFinal CO2011 VI 2022 213 268x With KeysNHÂN TRẦN TRỌNGNo ratings yet
- Chuong2 TinhieuvahethongDocument24 pagesChuong2 TinhieuvahethongB21DCDT105Nguyễn Duy Việt HưngNo ratings yet
- CSĐK Mô Tơ TH y L CDocument4 pagesCSĐK Mô Tơ TH y L CHào Võ VănNo ratings yet
- Chương 4Document8 pagesChương 4Thiện TrịnhNo ratings yet
- PPTBTLDocument12 pagesPPTBTLXUÂN THIÊNNo ratings yet
- Chương III Biến Đổi LaplaceDocument27 pagesChương III Biến Đổi LaplaceĐạt HuỳnhNo ratings yet
- PHT Chuong 1Document4 pagesPHT Chuong 1ngbahongphuca2k61No ratings yet
- Bao Cao Thuc Hanh LTDKTD (Cô Vân)Document39 pagesBao Cao Thuc Hanh LTDKTD (Cô Vân)Hiếu LêNo ratings yet
- CK 141Document2 pagesCK 141Phạm Đăng BảoNo ratings yet
- MẠCH DAO ĐỘNG LC ôn tậpDocument4 pagesMẠCH DAO ĐỘNG LC ôn tậpLinh KhánhNo ratings yet
- T.H rời rạc theo thời gian Tín hiệu liên tục theo thời gian Tín hiệu số Tín hiệu tương tựDocument10 pagesT.H rời rạc theo thời gian Tín hiệu liên tục theo thời gian Tín hiệu số Tín hiệu tương tựĐạt HuỳnhNo ratings yet
- ScaraDocument4 pagesScaraHTV AT ChannelNo ratings yet
- mẫu đk học phầnDocument1 pagemẫu đk học phầnDuc NguyenNo ratings yet
- Thời khóa biểuDocument1 pageThời khóa biểuDuc NguyenNo ratings yet
- (Bai Giang 1) .1Document3 pages(Bai Giang 1) .1Duc NguyenNo ratings yet
- kĩ năng mềm btDocument2 pageskĩ năng mềm btDuc NguyenNo ratings yet
- chiến thắng bản thânDocument2 pageschiến thắng bản thânDuc NguyenNo ratings yet
- Quản trị thời gianDocument5 pagesQuản trị thời gianDuc NguyenNo ratings yet
- BaiTap1 DTCSDocument4 pagesBaiTap1 DTCSDuc NguyenNo ratings yet