You might also like
- De Thi - 2016-Đã G PDocument18 pagesDe Thi - 2016-Đã G PNguyễn Mạnh HùngNo ratings yet
- De Thi - Dien - 16 06 2017Document1 pageDe Thi - Dien - 16 06 2017Đào Xuân ĐứcNo ratings yet
- LTDK-1 (De Thi+Dap An)Document38 pagesLTDK-1 (De Thi+Dap An)Toàn Ngô CảnhNo ratings yet
- Lý Thuyết, Phương Pháp, Bài Tập Có Đáp Chương Dao Động CơDocument28 pagesLý Thuyết, Phương Pháp, Bài Tập Có Đáp Chương Dao Động Cơnguyễn tất thànhNo ratings yet
- ĐỀ CƯƠNG KTCK 1-Lí 12Document34 pagesĐỀ CƯƠNG KTCK 1-Lí 12HeroNo ratings yet
- Dap An - Ly Thuyet DK - Hoc Ky 2 - 2017Document7 pagesDap An - Ly Thuyet DK - Hoc Ky 2 - 2017Đào Xuân ĐứcNo ratings yet
- Dap An TTS HK1 2019 2020Document6 pagesDap An TTS HK1 2019 2020Thành NhânNo ratings yet
- HW1 D11VTDocument36 pagesHW1 D11VTPhong-B21DCVT342 Nguyễn ĐìnhNo ratings yet
- Phep Bien Doi LaplaceDocument33 pagesPhep Bien Doi LaplaceTrung Nam PhạmNo ratings yet
- Ky Thuat Xung C1Document10 pagesKy Thuat Xung C1hatcat181985No ratings yet
- Tailieuxanh Chuyen de Boi Duong HSG Dao Dong Dien Tu 3446Document24 pagesTailieuxanh Chuyen de Boi Duong HSG Dao Dong Dien Tu 3446Đỗ UyênNo ratings yet
- ĐỀ CƯƠNG HKI-VL12 (17-18)Document19 pagesĐỀ CƯƠNG HKI-VL12 (17-18)DI TRẦN NGUYỄN GIANo ratings yet
- Khidonghoc Bai7 4273Document10 pagesKhidonghoc Bai7 4273MINHNo ratings yet
- 2.3. Cảm biến đo vị trí và dịch chuyểnDocument44 pages2.3. Cảm biến đo vị trí và dịch chuyểntien2003qtpro1No ratings yet
- kiến trúc máy tínhDocument6 pageskiến trúc máy tínhYến TrầnNo ratings yet
- Chủ Đề 3 Con Lắc ĐơnDocument6 pagesChủ Đề 3 Con Lắc ĐơnHuy LêNo ratings yet
- Dethi Dapan CosoDKTD20182 De1Document3 pagesDethi Dapan CosoDKTD20182 De1Dai TranNo ratings yet
- T 2-Cơ OnlineDocument12 pagesT 2-Cơ OnlineTuấn BùiNo ratings yet
- Bai 1 - Dieu Khien He Phi TuyenDocument23 pagesBai 1 - Dieu Khien He Phi TuyenTamtamTuNo ratings yet
- 09 - Chuong 5 - NGHICH LUU MOT PHADocument31 pages09 - Chuong 5 - NGHICH LUU MOT PHAHuỳnh Đức ThạoNo ratings yet
- AE - IV. Dong Chay Nen Duoc Khong NhotDocument20 pagesAE - IV. Dong Chay Nen Duoc Khong Nhottuangola12No ratings yet
- Dap-An Vat-Ly-1 PHYS130902 HKII 2019 2020 DTDocument4 pagesDap-An Vat-Ly-1 PHYS130902 HKII 2019 2020 DTtvan7426No ratings yet
- Tóm tắt vật lý lớp 12Document20 pagesTóm tắt vật lý lớp 12nguyenminhducthanh219No ratings yet
- 3. Tổng hợp hai dao động khác tần sốDocument9 pages3. Tổng hợp hai dao động khác tần sốVăn Quyền NguyễnNo ratings yet
- 212 - Chế độ làm việc của KCĐDocument39 pages212 - Chế độ làm việc của KCĐSnaNo ratings yet
- ĐỀ CƯƠNG HKI-VL12 (16-17)Document20 pagesĐỀ CƯƠNG HKI-VL12 (16-17)DI TRẦN NGUYỄN GIANo ratings yet
- Đặc Tả Ma Trận Giữa Kỳ HK1 Vật Lí 12Document7 pagesĐặc Tả Ma Trận Giữa Kỳ HK1 Vật Lí 12Trung Lê ThếNo ratings yet
- Chuong II - Ap Dung Nguyen Ly II Cua NDH Vao Hoa Hoc. Chieu Va Gioi Han Qua TrinhDocument11 pagesChuong II - Ap Dung Nguyen Ly II Cua NDH Vao Hoa Hoc. Chieu Va Gioi Han Qua TrinhĐạt Nguyễn TiếnNo ratings yet
- 8- DAO ĐỘNG TẮT DẦN-CƯỠNG BỨCDocument7 pages8- DAO ĐỘNG TẮT DẦN-CƯỠNG BỨCThanh Minh LêNo ratings yet
- Chapter 7Document55 pagesChapter 7Quang Lực TạNo ratings yet
- Bài Giảng Cơ Lưu Chất- Chương 5Document24 pagesBài Giảng Cơ Lưu Chất- Chương 5NGUYỄN TRI THỨCNo ratings yet
- Tóm-tắt-lí-thuyết-và-công-thức-ôn-thi-GHKII-đã chuyển đổiDocument22 pagesTóm-tắt-lí-thuyết-và-công-thức-ôn-thi-GHKII-đã chuyển đổiBùi HarveyNo ratings yet
- CHỦ ĐỀ 4 CLLX CLĐDocument7 pagesCHỦ ĐỀ 4 CLLX CLĐVinh HữuNo ratings yet
- Ham TruyenDocument35 pagesHam TruyenĐức AnNo ratings yet
- CH 8-9 - Dong Luc Hoc Vat RanDocument54 pagesCH 8-9 - Dong Luc Hoc Vat RanTruong TranNo ratings yet
- Bai 12Document62 pagesBai 12Rennie ticNo ratings yet
- BT Chuong 1 - Dao Dong Va SongDocument11 pagesBT Chuong 1 - Dao Dong Va SongminhnbntNo ratings yet
- Thực hành vật lý 1Document61 pagesThực hành vật lý 1Huong NguyenNo ratings yet
- Appendix DRT NVD 3Document68 pagesAppendix DRT NVD 3Nguyễn ThanhNo ratings yet
- Ch11 Nang LuongDocument25 pagesCh11 Nang Luongtú đỗNo ratings yet
- Bài Toán Cauchy Cho Phương Trình Truyền NhiệtDocument2 pagesBài Toán Cauchy Cho Phương Trình Truyền NhiệtKhánh HoàngNo ratings yet
- Tom Tat Li Thuyet Va Bai Tap Vat Li 12Document104 pagesTom Tat Li Thuyet Va Bai Tap Vat Li 12nguyễn tất thành100% (1)
- Hướng dẫn ôn tập ĐKLG-4Document8 pagesHướng dẫn ôn tập ĐKLG-4hiếu hoàng minhNo ratings yet
- Điện tử công suất chương 5Document31 pagesĐiện tử công suất chương 5Dũng Phạm PhướcNo ratings yet
- Thực Hành Vật Lý 1Document61 pagesThực Hành Vật Lý 1Thắm NguyễnNo ratings yet
- 02 Lý12Document40 pages02 Lý12Nguyen TuNo ratings yet
- Chuong 2 Mu - LogaritDocument4 pagesChuong 2 Mu - LogaritDung TranNo ratings yet
- ĐẶC TẢ CUỐI KỲ 1 VẬT LÝ 12Document8 pagesĐẶC TẢ CUỐI KỲ 1 VẬT LÝ 12MathSwsNo ratings yet
- 123doc Bao Cao Thi Nghiem Vat Li 1Document63 pages123doc Bao Cao Thi Nghiem Vat Li 1PHONG LÊ BÁNo ratings yet
- BD HSG Dòng Đxc-2022-2023Document113 pagesBD HSG Dòng Đxc-2022-2023ngocdang.31231023053No ratings yet
- Chu Kì Tần Số Con Lắc ĐơnDocument10 pagesChu Kì Tần Số Con Lắc Đơnelsie.tnsvNo ratings yet
- Chương III Biến Đổi LaplaceDocument27 pagesChương III Biến Đổi LaplaceĐạt HuỳnhNo ratings yet
- Chuong 2Document40 pagesChuong 2Tài NguyễnNo ratings yet
- Bai Tap Mon vldc1 Co Loi GiaiDocument85 pagesBai Tap Mon vldc1 Co Loi GiaiThanh Tung NguyenNo ratings yet
- XSTK c4Document23 pagesXSTK c4Trần Trung CườngNo ratings yet
- CLC-Chuong 4-Dong Luc Hoc Luu ChatDocument54 pagesCLC-Chuong 4-Dong Luc Hoc Luu ChatTrịnh Đức MinhNo ratings yet
- cô thảoDocument369 pagescô thảoViệt ToànNo ratings yet
- Chương 5. Chuyển động một chiều của chất lỏng nén đượcDocument29 pagesChương 5. Chuyển động một chiều của chất lỏng nén đượcVăn LộcNo ratings yet
- Dap An - Ly Thuyet DK - Hoc Ky 2 - 2017Document7 pagesDap An - Ly Thuyet DK - Hoc Ky 2 - 2017Đào Xuân ĐứcNo ratings yet
- De Thi 20191 Cuoi Ky ĐTMT 1Document3 pagesDe Thi 20191 Cuoi Ky ĐTMT 1Đào Xuân ĐứcNo ratings yet
- Week 1 Gii Thiu Phan Tich Va Thit KDocument8 pagesWeek 1 Gii Thiu Phan Tich Va Thit KĐào Xuân ĐứcNo ratings yet
- CLC BTL 2022 - 4-4Document1 pageCLC BTL 2022 - 4-4Đào Xuân ĐứcNo ratings yet
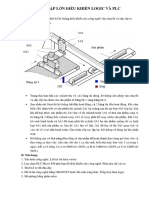
- Bài Tập Lớn PLCDocument9 pagesBài Tập Lớn PLCĐào Xuân ĐứcNo ratings yet
- Bài Tập Lớn PLCDocument7 pagesBài Tập Lớn PLCĐào Xuân ĐứcNo ratings yet