You might also like
- De Thi - CSTD - GK2 - 1718 - Dap AnDocument5 pagesDe Thi - CSTD - GK2 - 1718 - Dap AnHoàng OHoNo ratings yet
- Ingiaibt LaplaceDocument6 pagesIngiaibt LaplacePhước HàNo ratings yet
- Bài tập b2Document3 pagesBài tập b2Đức HạnhNo ratings yet
- Da Thuc Noi Suy Va Phuong Phap Binh Phuong Be NhatDocument9 pagesDa Thuc Noi Suy Va Phuong Phap Binh Phuong Be NhatPhúc NguyễnNo ratings yet
- Bài tập ôn cuối kỳ - Toán 1E1Document2 pagesBài tập ôn cuối kỳ - Toán 1E1draculasvipNo ratings yet
- Nguyễn Quang Minh-Bài3 4 cách đầuDocument5 pagesNguyễn Quang Minh-Bài3 4 cách đầuNguyễn Quang MinhNo ratings yet
- Thi cuối kỳ TCC2Document6 pagesThi cuối kỳ TCC2Quang Lộc NgôNo ratings yet
- Tin Hieu Va He Thong - Dinh Thi Thai Mai - de Thi Giua Ky I 2016 - 2017 Elt 2035 1Document4 pagesTin Hieu Va He Thong - Dinh Thi Thai Mai - de Thi Giua Ky I 2016 - 2017 Elt 2035 1Sơn Hồng NguyễnNo ratings yet
- BÀI TẬP ĐẠI SỐ TUYẾN TÍNHDocument12 pagesBÀI TẬP ĐẠI SỐ TUYẾN TÍNHB E ENo ratings yet
- ÔN TẬP CHƯƠNG 1Document8 pagesÔN TẬP CHƯƠNG 1Tuan HuaNo ratings yet
- Bai1Document6 pagesBai122021504No ratings yet
- Assignment 2 GR5Document7 pagesAssignment 2 GR5Bui Ngoc Huy (K17 CT)No ratings yet
- VuongHoangChien Tuan1Document4 pagesVuongHoangChien Tuan122021530No ratings yet
- 6.1C - HDBTVN - Tính Chất Chia Hết Của Số NguyênDocument2 pages6.1C - HDBTVN - Tính Chất Chia Hết Của Số NguyênNguyễn Trung HiếuNo ratings yet
- 15.06.13 Thi DLHDK SolDocument5 pages15.06.13 Thi DLHDK SolNam Bình TôNo ratings yet
- ĐÁP ÁN ĐỀ THI ĐỘI TUYỂN TOÁN 9 - ĐỀ 3 (2017 - 2018)Document4 pagesĐÁP ÁN ĐỀ THI ĐỘI TUYỂN TOÁN 9 - ĐỀ 3 (2017 - 2018)1HHT CHANNo ratings yet
- Nguyễn Quang Minh-Bài3 4 cách đầuDocument2 pagesNguyễn Quang Minh-Bài3 4 cách đầuNguyễn Quang MinhNo ratings yet
- Bài Tập Giải Pt, Hpt, BptDocument3 pagesBài Tập Giải Pt, Hpt, BptNhân TrầnNo ratings yet
- Buổi số 01 (8) - Ôn tậpDocument7 pagesBuổi số 01 (8) - Ôn tậpQuyền PhạmNo ratings yet
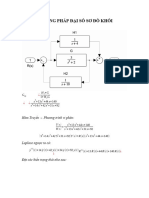
- Phương pháp đại số sơ đồ khốiDocument17 pagesPhương pháp đại số sơ đồ khốiIRumiatWorTNo ratings yet
- Giải Đề Giải Tích 3 Cuối Kỳ 20191Document6 pagesGiải Đề Giải Tích 3 Cuối Kỳ 20191Thành Nam NgôNo ratings yet
- DA-toan 3 - hk3-2223-CLCDocument2 pagesDA-toan 3 - hk3-2223-CLCnph16052004No ratings yet
- NguyenVanDuy_22021530_K67ATDocument4 pagesNguyenVanDuy_22021530_K67AT22021530No ratings yet
- ĐặngThanhHuy BAI6Document7 pagesĐặngThanhHuy BAI6Nguyễn PhúNo ratings yet
- ĐÁP ÁN ÔN TẬP MA TRẬNDocument6 pagesĐÁP ÁN ÔN TẬP MA TRẬNvivipro66No ratings yet
- Lời giải bài tập cuối kìDocument95 pagesLời giải bài tập cuối kìtan lequangNo ratings yet
- Lời Giải Bài Tập Chương IIIDocument24 pagesLời Giải Bài Tập Chương IIITùng PhạmNo ratings yet
- nhận dạng đường, mặt bậc 2-đã chuyển đổiDocument12 pagesnhận dạng đường, mặt bậc 2-đã chuyển đổiThanh Phương TrầnNo ratings yet
- Tai Lieu HDDocument45 pagesTai Lieu HDNhâm BìnhNo ratings yet
- 89999999999Document3 pages8999999999922021530No ratings yet
- ĐỀ CƯƠNG ÔN TẬP - LTDKTD - 2022-2023 - lời giải cá nhânDocument20 pagesĐỀ CƯƠNG ÔN TẬP - LTDKTD - 2022-2023 - lời giải cá nhânHiếu Lê100% (2)
- SửaDocument4 pagesSửa22021530No ratings yet
- Axtt N39Document3 pagesAxtt N39Tuan HuaNo ratings yet
- THHT Dap An Cuoi Ky HK1 2017 2018Document4 pagesTHHT Dap An Cuoi Ky HK1 2017 201821020441 Vũ Thu HuyềnNo ratings yet
- điều khiển nâng caoDocument8 pagesđiều khiển nâng caohuy thanhNo ratings yet
- Bai2ver3Document8 pagesBai2ver322021530No ratings yet
- Ama301 2111 9 Ge29-Trần Thị Thuỷ TiênDocument7 pagesAma301 2111 9 Ge29-Trần Thị Thuỷ TiênThủy TiênNo ratings yet
- De Thi Va Dap An Cuoi Ky MAT1090Document28 pagesDe Thi Va Dap An Cuoi Ky MAT1090Toàn KhánhNo ratings yet
- Bo de Thi Toan Hoc Ki 2 Lop 7Document56 pagesBo de Thi Toan Hoc Ki 2 Lop 7songanhNo ratings yet
- Cac PHNG Phap Gii PHNG Trinh Ham THDocument30 pagesCac PHNG Phap Gii PHNG Trinh Ham THPhạm ThảoNo ratings yet
- 1.PT BPT Mu Loga Phan1Document15 pages1.PT BPT Mu Loga Phan1Huong Ursus Maritimus HoangNo ratings yet
- Bai2_ATDocument8 pagesBai2_AT22021530No ratings yet
- Phần 1Document10 pagesPhần 1chinhNo ratings yet
- Định Lý Khai Triển HeavisideDocument15 pagesĐịnh Lý Khai Triển HeavisideNguyễn Bình NamNo ratings yet
- Baitap HBPDocument101 pagesBaitap HBPbxckyhh4ncNo ratings yet
- Final Exam Review: 1. Euclid's AlgorithmDocument12 pagesFinal Exam Review: 1. Euclid's AlgorithmNguyễn MinhNo ratings yet
- Toán 1 - Chương 4 - ĐáDocument7 pagesToán 1 - Chương 4 - ĐáTrí Tân PhạmNo ratings yet
- BÀI TẬP ÔN TẬP GIẢI HỆ PHƯƠNG TRÌNHDocument1 pageBÀI TẬP ÔN TẬP GIẢI HỆ PHƯƠNG TRÌNHquan buihongNo ratings yet
- Lời giải đề gkDocument68 pagesLời giải đề gkPham Thanh TungNo ratings yet
- BÀI CUỐI KỲDocument8 pagesBÀI CUỐI KỲLâm Thu HòaNo ratings yet
- Giải tích 3 - CK 20181 - nhóm 1Document4 pagesGiải tích 3 - CK 20181 - nhóm 1Tuệ LýNo ratings yet
- Buổi số 01 (11) - Ôn tập mũ lũy thừa logaritDocument6 pagesBuổi số 01 (11) - Ôn tập mũ lũy thừa logaritQuyền PhạmNo ratings yet
- ĐÁP ÁN ĐỀ THI ĐỘI TUYỂN TOÁN 9 - ĐỀ 1 (2014 - 2015)Document4 pagesĐÁP ÁN ĐỀ THI ĐỘI TUYỂN TOÁN 9 - ĐỀ 1 (2014 - 2015)1HHT CHANNo ratings yet
- nam định chuyên toán từ 12-13 đến 23-24Document55 pagesnam định chuyên toán từ 12-13 đến 23-24Nguyễn Gia MinhNo ratings yet
- GiaiDeThi LTĐKTĐ CTDocument8 pagesGiaiDeThi LTĐKTĐ CTJoe PhạmNo ratings yet
- đề-giải-chi-tiết-TCC1Document4 pagesđề-giải-chi-tiết-TCC132.Kiều OanhNo ratings yet
- Bài Tập Chương 2 - Tổ 3Document12 pagesBài Tập Chương 2 - Tổ 3ngocle.31231022040No ratings yet
- Bài Giảng - môn Học Khai Thác Và Bảo Dưỡng ô TôDocument194 pagesBài Giảng - môn Học Khai Thác Và Bảo Dưỡng ô TôHiệp ĐoànNo ratings yet
- ĐỀ 2Document4 pagesĐỀ 2Hiệp ĐoànNo ratings yet
- ĐỀ 1Document4 pagesĐỀ 1Hiệp ĐoànNo ratings yet
- 2019 CK Cod TNDocument2 pages2019 CK Cod TNTrần NhậtNo ratings yet