You might also like
- Chương II: Các Cơ Cấu Thanh PhẳngDocument15 pagesChương II: Các Cơ Cấu Thanh PhẳngminhmsetguNo ratings yet
- Chapter 3Document27 pagesChapter 37.Vương Đình CủaNo ratings yet
- BTL May Nen 2022.1Document3 pagesBTL May Nen 2022.1Cương NguyễnNo ratings yet
- Slide bài giảng chương 3 PDFDocument69 pagesSlide bài giảng chương 3 PDFCường Nguyễn TháiNo ratings yet
- Chuong 6 Co Cau CamDocument31 pagesChuong 6 Co Cau CamNguyễn Hải NamNo ratings yet
- CNCTM hk2 1415 PDFDocument4 pagesCNCTM hk2 1415 PDFdi caoNo ratings yet
- 5 - TD Truc vit-TCDocument42 pages5 - TD Truc vit-TCkhang dongNo ratings yet
- Chuong 13 - Co Cau Dac BietDocument9 pagesChuong 13 - Co Cau Dac BietNguyễn Gia HuyNo ratings yet
- Da Hrbs421217 KCNCTDocument2 pagesDa Hrbs421217 KCNCTabccNo ratings yet
- 1.20210831. Biên bản về toạ độDocument4 pages1.20210831. Biên bản về toạ độchungdo1028No ratings yet
- Btldco Nenkhi 90Document4 pagesBtldco Nenkhi 90Huy Vũ ĐứcNo ratings yet
- Cơ LT Cơ KT Cuối Kỳ Nam Lê k22Document17 pagesCơ LT Cơ KT Cuối Kỳ Nam Lê k22Nguyễn Duy ĐạtNo ratings yet
- Công thức Kết Cấu Thép Chương 3, 4, 5Document5 pagesCông thức Kết Cấu Thép Chương 3, 4, 5dragonson1No ratings yet
- C - 08. Cơ cấu phẳng toàn khớp thấpDocument16 pagesC - 08. Cơ cấu phẳng toàn khớp thấpAnh HuyNo ratings yet
- Chuyên Đề Toán 10Document34 pagesChuyên Đề Toán 10Y Tử ThanhNo ratings yet
- Chuong 2 CC Khuy Truc Thanh TruyenDocument21 pagesChuong 2 CC Khuy Truc Thanh TruyenBùi ViệtAnhNo ratings yet
- Kinh-Te-Luong - Dinh-Thi-Thanh-Binh - Chuong-5 - Kiem-Dinh-Da-Bien - (Cuuduongthancong - Com)Document22 pagesKinh-Te-Luong - Dinh-Thi-Thanh-Binh - Chuong-5 - Kiem-Dinh-Da-Bien - (Cuuduongthancong - Com)23. Vũ Thị Thuỳ HươngNo ratings yet
- Bai Tap Lon Co Hoc Ket Cau 2 2079Document6 pagesBai Tap Lon Co Hoc Ket Cau 2 2079Luan Truong VanNo ratings yet
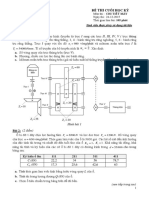
- De Thi Cuoi Ky CHI TIET MAY 24.12.2015Document2 pagesDe Thi Cuoi Ky CHI TIET MAY 24.12.2015Nguyễn Hữu Hải LuânNo ratings yet
- Co-So-Dien-Tu-Cong-Suat - Phan-Quoc-Dung - Dap-An-Csdtcs - KT-GHK - 2018 - CQ - (Cuuduongthancong - Com)Document7 pagesCo-So-Dien-Tu-Cong-Suat - Phan-Quoc-Dung - Dap-An-Csdtcs - KT-GHK - 2018 - CQ - (Cuuduongthancong - Com)HOAN NGUYỄN CÔNGNo ratings yet
- CHƯƠNG 6 - VI DuDocument74 pagesCHƯƠNG 6 - VI Duthongkieu947No ratings yet
- BT Chuyen Dong Phuc HopDocument4 pagesBT Chuyen Dong Phuc HopDuy KhổngNo ratings yet
- PP GIẢI BÀI TẬP HỖN HỢP HAI ESTE KHÓDocument34 pagesPP GIẢI BÀI TẬP HỖN HỢP HAI ESTE KHÓTran Dong NguyenNo ratings yet
- Co-Ky-Thuat - Thay-Nhan - De-Thi-Co-Ly-Thuyet-Thme230721-Hk2-2017-2018 - New - (Cuuduongthancong - Com)Document4 pagesCo-Ky-Thuat - Thay-Nhan - De-Thi-Co-Ly-Thuyet-Thme230721-Hk2-2017-2018 - New - (Cuuduongthancong - Com)mkietdzNo ratings yet
- Bài Toán NhietDocument3 pagesBài Toán NhietThư NguyễnNo ratings yet
- Đề Thi Olympic2016Document131 pagesĐề Thi Olympic2016Hoàng Nguyễn HuyNo ratings yet
- Dap So de Thi VPhO 2018 - Ngay 1 Va 2Document2 pagesDap So de Thi VPhO 2018 - Ngay 1 Va 2theanh249tpcNo ratings yet
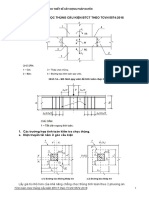
- PHD-Guideline-Punching shear-TCVN5574-2018Document10 pagesPHD-Guideline-Punching shear-TCVN5574-2018Đức VũNo ratings yet
- Nhóm 8Document28 pagesNhóm 8Lợi Trần VănNo ratings yet
- Dap An CNCTM Hk2-1718Document5 pagesDap An CNCTM Hk2-1718LêNguyễnAnhTuấnNo ratings yet
- Thuyết MinhDocument35 pagesThuyết MinhNight DarkNo ratings yet
- Nguyen-Li - Chi-Tiet-May - Nguyen-Minh-Ky - De-3-Btl - DH - 2020 - (Cuuduongthancong - Com)Document2 pagesNguyen-Li - Chi-Tiet-May - Nguyen-Minh-Ky - De-3-Btl - DH - 2020 - (Cuuduongthancong - Com)Nicky NguyenNo ratings yet
- CLC-Chuong 6 - Ton That Nang Luong Trong DuongDocument41 pagesCLC-Chuong 6 - Ton That Nang Luong Trong DuongKhoa Đồng BíchNo ratings yet
- Hướng dẫn ôn tập ĐKLG - 3Document7 pagesHướng dẫn ôn tập ĐKLG - 3hiếu hoàng minhNo ratings yet
- Tailieuxanh 02 May Canh Dan 5619Document38 pagesTailieuxanh 02 May Canh Dan 5619Quân ĐỗNo ratings yet
- 01 Giáo Trình Thực Hành Trang Bị Điện PDFDocument78 pages01 Giáo Trình Thực Hành Trang Bị Điện PDFLê Đăng KhoaNo ratings yet
- Biển MặnDocument4 pagesBiển MặnTuan DoNo ratings yet
- Nhóm 3Document25 pagesNhóm 3PBC21No ratings yet
- NLM - Chuong 10 - Mot So Co Cau KhacDocument13 pagesNLM - Chuong 10 - Mot So Co Cau Khacchuongdieu225No ratings yet
- 2308. Đề Đồ Án Hệ Dẫn Động Cơ Khí - Cơ Điện Tử - K66Document35 pages2308. Đề Đồ Án Hệ Dẫn Động Cơ Khí - Cơ Điện Tử - K66phamcongchuc2405No ratings yet
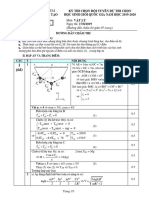
- Dap An Chinh Thuc Tuyen QG 2019 2020 LyDocument5 pagesDap An Chinh Thuc Tuyen QG 2019 2020 LyVũ Lam HiênNo ratings yet
- TDH Thuy-Khi Chương 3 - 20212Document90 pagesTDH Thuy-Khi Chương 3 - 20212tiến nam nguyễnNo ratings yet
- De Va Dap An Vat Ly 10 - Chuyen Tran Phu - Hai Phong 2019Document12 pagesDe Va Dap An Vat Ly 10 - Chuyen Tran Phu - Hai Phong 2019theanh249tpcNo ratings yet
- Pe Ch6 XungapacDocument24 pagesPe Ch6 XungapacNhiên Phạm CôngNo ratings yet
- De Thi Co Ly Thuyet THME220821 hk1 2016-2017 - FINAL - New - Version 2Document5 pagesDe Thi Co Ly Thuyet THME220821 hk1 2016-2017 - FINAL - New - Version 2Dũng LêNo ratings yet
- Giai-Tich-Mach - Mach-2-Mach-Xac-Lap-Dieu-Hoa - (Cuuduongthancong - Com)Document61 pagesGiai-Tich-Mach - Mach-2-Mach-Xac-Lap-Dieu-Hoa - (Cuuduongthancong - Com)Bảo NguyễnNo ratings yet
- CHƯƠNG 1 CẤU TRÚC VÀ XẾP LOẠI CƠ CẤUDocument7 pagesCHƯƠNG 1 CẤU TRÚC VÀ XẾP LOẠI CƠ CẤUakaipro89No ratings yet
- Bai 2 - de Cuong Bai GiangDocument14 pagesBai 2 - de Cuong Bai GiangTriển LêNo ratings yet
- Lec 4Document15 pagesLec 4Đỗ Duy KhangNo ratings yet
- 221 - Bài giảng 02-Đặc điểm sự cốDocument9 pages221 - Bài giảng 02-Đặc điểm sự cốPhi LongNo ratings yet
- Chương 2.3 Tỉ số truyền và các chỉ tiêu động học cơ cấu phẳngDocument8 pagesChương 2.3 Tỉ số truyền và các chỉ tiêu động học cơ cấu phẳngNguyễn Văn ThànhNo ratings yet
- Auld Lang SyneDocument2 pagesAuld Lang SyneMr Max 1188No ratings yet
- BTL NLM Nhom12Document19 pagesBTL NLM Nhom12Lê Đức HiếuNo ratings yet
- Công Thức 12Document16 pagesCông Thức 12vynguyen.31231026265No ratings yet
- 5. Thiết Kế Bộ Truyền XíchDocument18 pages5. Thiết Kế Bộ Truyền XíchThành LuânNo ratings yet
- BTL May Det 2022.1Document3 pagesBTL May Det 2022.1Dũng MạnhNo ratings yet
- Bài Tạp Chương Chuong2Document2 pagesBài Tạp Chương Chuong2Quân NguyễnNo ratings yet
- Đề thi PP PTHH HK211Document1 pageĐề thi PP PTHH HK211Than Trong Khanh DatNo ratings yet
- Chuong 3Document32 pagesChuong 37.Vương Đình CủaNo ratings yet
- Cau Hoi Bai Tap Chuong DKTDDocument7 pagesCau Hoi Bai Tap Chuong DKTD7.Vương Đình CủaNo ratings yet
- Tinh Ton That Ong Gio Mem ADC - Green - Book - 5thDocument32 pagesTinh Ton That Ong Gio Mem ADC - Green - Book - 5th7.Vương Đình CủaNo ratings yet
- Chapter 4Document22 pagesChapter 47.Vương Đình CủaNo ratings yet