You might also like
- De Cuong NL-CTM k15 - 2021 NewDocument6 pagesDe Cuong NL-CTM k15 - 2021 NewHằng NguyễnNo ratings yet
- Bài 6 Cơ cấu camDocument23 pagesBài 6 Cơ cấu camThang NguyenNo ratings yet
- CHƯƠNG IV. Co Cau CamDocument14 pagesCHƯƠNG IV. Co Cau CamHoài NiệmNo ratings yet
- Bai Giang Chuong 4 - Co Cau CamDocument35 pagesBai Giang Chuong 4 - Co Cau Camhatuanphong.ftnNo ratings yet
- KetCauOto K56 P2seDocument94 pagesKetCauOto K56 P2seRicardo Thanh ĐạtNo ratings yet
- C - 09. Cơ cấu camDocument25 pagesC - 09. Cơ cấu camAnh HuyNo ratings yet
- Bài 6 - Đề Cương Bài GiảngDocument11 pagesBài 6 - Đề Cương Bài Giảngtranhoan95959No ratings yet
- Chương 5 CƠ CẤU CAMDocument35 pagesChương 5 CƠ CẤU CAMNgo TuandungNo ratings yet
- NLM Chuong 9 - Co Cau Dac BietDocument11 pagesNLM Chuong 9 - Co Cau Dac BietAnh Dũng ĐỗNo ratings yet
- Chapter 08Document2 pagesChapter 08NGỌC LUÂN ĐOÀNNo ratings yet
- 5 - TD Truc vit-TCDocument42 pages5 - TD Truc vit-TCkhang dongNo ratings yet
- Chuong 7Document33 pagesChuong 7Thiên PhạmNo ratings yet
- Cơ Cấu Cam: Chương VDocument5 pagesCơ Cấu Cam: Chương VminhmsetguNo ratings yet
- Chuong 7 Co Cau Banh Rang Va He Banh Rang PDFDocument64 pagesChuong 7 Co Cau Banh Rang Va He Banh Rang PDFNguyễn Hải NamNo ratings yet
- Nguyên Lý Chi TiếT MáY: Chương 9 TrụC Và Ổ TrụCDocument87 pagesNguyên Lý Chi TiếT MáY: Chương 9 TrụC Và Ổ TrụCKhang NguyễnNo ratings yet
- Nhóm 9Document77 pagesNhóm 9Công NgôNo ratings yet
- Chuong 7. May Va Thiet Bi Gia Cong DaDocument15 pagesChuong 7. May Va Thiet Bi Gia Cong DaFor You Best ShirtsNo ratings yet
- Nguyen Ly May Chương 7Document75 pagesNguyen Ly May Chương 7Tấn ThànhNo ratings yet
- Chương 2 - Cơ Sở Vật Lý Quá Trình Cắt Kim LoạiDocument141 pagesChương 2 - Cơ Sở Vật Lý Quá Trình Cắt Kim LoạiHứa Tuấn ĐôNo ratings yet
- Bài móng của hiếuDocument66 pagesBài móng của hiếuluankuto2002No ratings yet
- Chương 5. 6- Bộ Truyền Trục VítDocument25 pagesChương 5. 6- Bộ Truyền Trục VítBùi MInh ĐứcNo ratings yet
- 08 Loi Giai Ngo Si Lien Bac Giang Thi Thu Lan 1 20231101115813 0g2fzDocument10 pages08 Loi Giai Ngo Si Lien Bac Giang Thi Thu Lan 1 20231101115813 0g2fzNguyễn Ngọc Quang MinhNo ratings yet
- 5. Thiết Kế Bộ Truyền XíchDocument18 pages5. Thiết Kế Bộ Truyền XíchThành LuânNo ratings yet
- Chuong 5 Cac Cam Biến Thong DungDocument49 pagesChuong 5 Cac Cam Biến Thong DungThành SiNo ratings yet
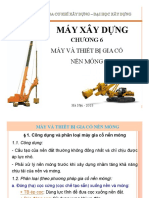
- Chuong 6. May Va Thiet Bi Gia Co Nen MongDocument12 pagesChuong 6. May Va Thiet Bi Gia Co Nen MongFor You Best ShirtsNo ratings yet
- Chuong 6-TV-BVDocument33 pagesChuong 6-TV-BVNguyễn Minh HảoNo ratings yet
- TDH Thuy-Khi Chương 3 - 20212Document90 pagesTDH Thuy-Khi Chương 3 - 20212tiến nam nguyễnNo ratings yet
- On Tap NLM 2TC (2021)Document8 pagesOn Tap NLM 2TC (2021)Phạm BìnhNo ratings yet
- BT Chuyen Dong Phuc HopDocument4 pagesBT Chuyen Dong Phuc HopDuy KhổngNo ratings yet
- Chương 2.3 Tỉ số truyền và các chỉ tiêu động học cơ cấu phẳngDocument8 pagesChương 2.3 Tỉ số truyền và các chỉ tiêu động học cơ cấu phẳngNguyễn Văn ThànhNo ratings yet
- Ch1-CHAN DOAN DONG CO-2020Document19 pagesCh1-CHAN DOAN DONG CO-2020Nguyễn Minh HoàngNo ratings yet
- Chương 4 - Thiết kế cơ cấu camDocument86 pagesChương 4 - Thiết kế cơ cấu cam22010791No ratings yet
- Chương 8-Do Ve Dong SongDocument23 pagesChương 8-Do Ve Dong SongĐoàn Hữu HiếuNo ratings yet
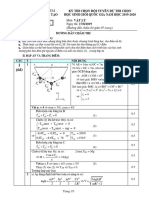
- Dap An Chinh Thuc Tuyen QG 2019 2020 LyDocument5 pagesDap An Chinh Thuc Tuyen QG 2019 2020 LyVũ Lam HiênNo ratings yet
- Chuong 5 Ton That Nang Luong Trong Dong ChayDocument43 pagesChuong 5 Ton That Nang Luong Trong Dong ChayThịnh VănNo ratings yet
- Chuong 3. Cau ThangDocument14 pagesChuong 3. Cau ThangBích Diệp Phan NguyễnNo ratings yet
- Qua Trinh Thiet Bi Silicat Nguyen Khanh Son Chuong2 Dap Ham (Cuuduongthancong - Com)Document8 pagesQua Trinh Thiet Bi Silicat Nguyen Khanh Son Chuong2 Dap Ham (Cuuduongthancong - Com)Khoa NguyenNo ratings yet
- Phân tích và tính toán móng cọc - Võ PhánDocument271 pagesPhân tích và tính toán móng cọc - Võ Pháncau Ket0% (1)
- Chuong 9 He Banh RangDocument4 pagesChuong 9 He Banh RangHa HaiNo ratings yet
- KHỐI TRÒN XOAY-ĐÁP ÁNDocument19 pagesKHỐI TRÒN XOAY-ĐÁP ÁNTommy NguyenNo ratings yet
- 1 DinhLuatPhuongThucKTDocument30 pages1 DinhLuatPhuongThucKTTÀI TRƯƠNG HỮUNo ratings yet
- 1 DinhLuatPhuongThucKTDocument14 pages1 DinhLuatPhuongThucKTtien.tran2412No ratings yet
- TKMH kết cấu tính toánDocument32 pagesTKMH kết cấu tính toánHoàng LậpNo ratings yet
- Bai 2 - de Cuong Bai GiangDocument14 pagesBai 2 - de Cuong Bai GiangTriển LêNo ratings yet
- Bai Giang CHUONG 4-KET KHOIDocument113 pagesBai Giang CHUONG 4-KET KHOISoc Rua NguyenNo ratings yet
- De Kiem Tra Giua Hoc Ki 1 THPT Di An So Binh Duong 20231026030228 ZutfbDocument5 pagesDe Kiem Tra Giua Hoc Ki 1 THPT Di An So Binh Duong 20231026030228 ZutfbHà NghiêmNo ratings yet
- Chapter 2Document28 pagesChapter 27.Vương Đình CủaNo ratings yet
- De Cuong Van Dap Nl-ctm-k15Document8 pagesDe Cuong Van Dap Nl-ctm-k15Dai NgoNo ratings yet
- 0cf38 35832Document54 pages0cf38 35832Huỳnh HươngNo ratings yet
- SlideDocument26 pagesSlideDavid NguyenNo ratings yet
- CLC-Chuong 6 - Ton That Nang Luong Trong DuongDocument41 pagesCLC-Chuong 6 - Ton That Nang Luong Trong DuongKhoa Đồng BíchNo ratings yet
- Chuong 5Document51 pagesChuong 5KiWiNo ratings yet
- GIẢI VDC- LƯƠNG HẾ VINH (2021) KhóDocument3 pagesGIẢI VDC- LƯƠNG HẾ VINH (2021) KhóThái Thịnh 32.Phạm ThịNo ratings yet
- Ví D SànDocument4 pagesVí D Sàn0012Nguyễn Văn CôngNo ratings yet
- De Cuong Van Dap NL-CTM-2021-2022Document7 pagesDe Cuong Van Dap NL-CTM-2021-2022thanh vu longNo ratings yet
- Bai 8 - May Cong CuDocument79 pagesBai 8 - May Cong CuLinh Nguyễn vănNo ratings yet
- Pe Ch6 XungapacDocument24 pagesPe Ch6 XungapacNhiên Phạm CôngNo ratings yet
- Chương IX Cơ Cấu CamDocument28 pagesChương IX Cơ Cấu CamTháiSơnTrầnNo ratings yet
- Giao An Nguyen Ly May-Noprint PDFDocument130 pagesGiao An Nguyen Ly May-Noprint PDFNguyễn Hải NamNo ratings yet
- Chuong 5 Co Cau Thanh PhangDocument22 pagesChuong 5 Co Cau Thanh PhangNguyễn Hải NamNo ratings yet
- Chuong 7 Co Cau Banh Rang Va He Banh Rang PDFDocument64 pagesChuong 7 Co Cau Banh Rang Va He Banh Rang PDFNguyễn Hải NamNo ratings yet
- Chuong 3 Phan Tich Luc Co CauDocument24 pagesChuong 3 Phan Tich Luc Co CauNguyễn Hải NamNo ratings yet
- Chuong 4 Dong Luc Hoc Co Cau Va MayDocument37 pagesChuong 4 Dong Luc Hoc Co Cau Va MayNguyễn Hải NamNo ratings yet