You might also like
- Buck - điều khiển điện ápDocument32 pagesBuck - điều khiển điện ápThọ VũNo ratings yet
- Ch6 - Điều Khiển Hệ Truyền Động - Updated251022Document23 pagesCh6 - Điều Khiển Hệ Truyền Động - Updated251022Nguyễn Văn LinhNo ratings yet
- HT TDH NMG P2Document60 pagesHT TDH NMG P2Tòng LêNo ratings yet
- TDD1Document26 pagesTDD1Biên ThìnNo ratings yet
- Chuong5 DCDocument49 pagesChuong5 DCThiên Ân Nguyễn PhướcNo ratings yet
- 1.bài 1 TH C Hành Đtcs 2021 2022cư NGDocument115 pages1.bài 1 TH C Hành Đtcs 2021 2022cư NGđình thuấnNo ratings yet
- CHƯƠNG 1 - Tổ Chức Vận Hành Và Điều Độ HTĐDocument60 pagesCHƯƠNG 1 - Tổ Chức Vận Hành Và Điều Độ HTĐThành CôngNo ratings yet
- Bai Giang - TT 40Document74 pagesBai Giang - TT 40Nguyễn Ngọc ĐạtNo ratings yet
- VT-RNOC1 - 2-Giải pháp nâng cao chất lượng dịch vụDocument9 pagesVT-RNOC1 - 2-Giải pháp nâng cao chất lượng dịch vụThang LangNo ratings yet
- Tap 4.2.cac Ban Ve Phan Xay Dung PDFDocument117 pagesTap 4.2.cac Ban Ve Phan Xay Dung PDFNero Dante100% (1)
- Buck-boost Dòng DỉnhDocument28 pagesBuck-boost Dòng DỉnhLong Vũ VănNo ratings yet
- INE322 529.tinhtoansuachuamaydien BMDiencongnghiepDocument4 pagesINE322 529.tinhtoansuachuamaydien BMDiencongnghiepPhong HuynhNo ratings yet
- Chuong 1 - Nhung Khai Niem Co BanDocument40 pagesChuong 1 - Nhung Khai Niem Co BanTrần Thành ĐạtNo ratings yet
- DTTT2 V2Document14 pagesDTTT2 V2Nguyễn Văn KhoaNo ratings yet
- Chuong 5 Chuyen Dong ThucDocument30 pagesChuong 5 Chuyen Dong ThucQuang PhạmNo ratings yet
- Thanh - Hệ thống bom va quat -Gui hoc vienDocument25 pagesThanh - Hệ thống bom va quat -Gui hoc vienTan PhanNo ratings yet
- Truyen-Dong-Dien - Ha-Xuan-Hoa - Chuong-3 - (Cuuduongthancong - Com)Document54 pagesTruyen-Dong-Dien - Ha-Xuan-Hoa - Chuong-3 - (Cuuduongthancong - Com)Touya AkiraNo ratings yet
- Khảo sát động cơ DCDocument16 pagesKhảo sát động cơ DC21151381No ratings yet
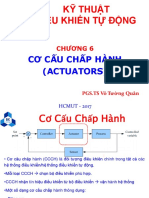
- Chuong 6 - Co Cau Chap HanhDocument55 pagesChuong 6 - Co Cau Chap Hanhhuynhduc12355No ratings yet
- Bài giảng chương 6 - Phần tử điện - khí nénDocument44 pagesBài giảng chương 6 - Phần tử điện - khí nénthắng NguyễnNo ratings yet
- TDH NMG P1Document29 pagesTDH NMG P1Tòng LêNo ratings yet
- HTCCĐ-Slide NĐT BKHN UnlockedDocument442 pagesHTCCĐ-Slide NĐT BKHN UnlockedĐạt BéoNo ratings yet
- Nhóm 12 lần 2Document29 pagesNhóm 12 lần 2Thiên TrầnNo ratings yet
- Phân tích cấu trúc điển hình của PSSDocument30 pagesPhân tích cấu trúc điển hình của PSSTan NguyenNo ratings yet
- 80-Article Text-645-2-10-20220607Document10 pages80-Article Text-645-2-10-20220607Tran LuanNo ratings yet
- Chuong 1 - Nhung Khai Niem Co BanDocument60 pagesChuong 1 - Nhung Khai Niem Co BanVõ Trọng ĐứcNo ratings yet
- Kiểm Nghiệm Quá Trình Chọt Ống Hút CỏDocument19 pagesKiểm Nghiệm Quá Trình Chọt Ống Hút CỏTrường Quang NguyễnNo ratings yet
- Process ControlDocument74 pagesProcess ControlDân Nguyễn Hồ NgọcNo ratings yet
- QTVH-009 GlopDocument10 pagesQTVH-009 GlopThủy điện Huổi Vang A21.17No ratings yet
- CASD 2017. Mạch PFC hiệu suất cao ứng dụng trong các bộ sạc trên xe điệnDocument7 pagesCASD 2017. Mạch PFC hiệu suất cao ứng dụng trong các bộ sạc trên xe điệnNam Hoang ThanhNo ratings yet
- Bao Duong Thiet Bi Phong Mo 2022Document11 pagesBao Duong Thiet Bi Phong Mo 2022Lê Văn KhánhNo ratings yet
- Chuong4 Dongluchoc SVDocument30 pagesChuong4 Dongluchoc SVĐức Bình MaiNo ratings yet
- chương 2 Nâng cao chất lượng v2Document44 pageschương 2 Nâng cao chất lượng v2Huy Quoc NguyenNo ratings yet
- Chuyển Động ThựcDocument30 pagesChuyển Động ThựcBạch Quang TiếnNo ratings yet
- Phân tích và tính toán móng cọc - Võ PhánDocument271 pagesPhân tích và tính toán móng cọc - Võ Pháncau Ket0% (1)
- KTĐT B3Document12 pagesKTĐT B3chotoilangthangNo ratings yet
- Thiet Ke He Thong Dieu Khien Dien Tu Cong Suat Vu Trong Minh, Vu Hoang Phuong DC DC Current Mode (Cuuduongthancong - Com)Document18 pagesThiet Ke He Thong Dieu Khien Dien Tu Cong Suat Vu Trong Minh, Vu Hoang Phuong DC DC Current Mode (Cuuduongthancong - Com)A1CKM giPkcalBNo ratings yet
- Chương 3Document45 pagesChương 3dieu linh nguyenNo ratings yet
- Thiet-Ke-He-Thong-Dieu-Khien-Dien-Tu-Cong-Suat - Vu-Trong-Minh,-Vu-Hoang-Phuong - Nghich-Luu-1-Pha-Doc-Lap - (Cuuduongthancong - Com)Document40 pagesThiet-Ke-He-Thong-Dieu-Khien-Dien-Tu-Cong-Suat - Vu-Trong-Minh,-Vu-Hoang-Phuong - Nghich-Luu-1-Pha-Doc-Lap - (Cuuduongthancong - Com)Hà Lê Trọng NghĩaNo ratings yet
- Chương Iv: Động Lực Học Cơ Cấu Và MáyDocument10 pagesChương Iv: Động Lực Học Cơ Cấu Và MáyminhmsetguNo ratings yet
- Thiet Ke He Thong Dieu Khien Dien Tu Cong Suat Vu Trong Minh, Vu Hoang Phuong Ac DC Tiristor (Cuuduongthancong - Com)Document18 pagesThiet Ke He Thong Dieu Khien Dien Tu Cong Suat Vu Trong Minh, Vu Hoang Phuong Ac DC Tiristor (Cuuduongthancong - Com)lamxuankhanh2002No ratings yet
- Nang Cao Chat Luong Dien AP Bang Cach Thay Doi He So Cong Suat Cosφ AP Dung Tinh Toan Thiet Ke Tu Bu Cho Tram Bien AP Tieu Thu 560kva 35-0-4kv Cung Cap Dien Cho Cong Ty Tnhh h bDocument105 pagesNang Cao Chat Luong Dien AP Bang Cach Thay Doi He So Cong Suat Cosφ AP Dung Tinh Toan Thiet Ke Tu Bu Cho Tram Bien AP Tieu Thu 560kva 35-0-4kv Cung Cap Dien Cho Cong Ty Tnhh h btdcnttaNo ratings yet
- Thiet Ke Bo Dieu Khien Chong Lac Fuzzy PD Cho He CDocument7 pagesThiet Ke Bo Dieu Khien Chong Lac Fuzzy PD Cho He CNH NghĩaNo ratings yet
- Tai Lieu Dao Tao Chuyen de - Role Bao Ve Trong HTD - EVN (07.2020)Document353 pagesTai Lieu Dao Tao Chuyen de - Role Bao Ve Trong HTD - EVN (07.2020)Sơn PhạmNo ratings yet
- Nhóm 5Document16 pagesNhóm 5PBC21No ratings yet
- Đồ Án Mẫu Điện Tử Công SuấtDocument36 pagesĐồ Án Mẫu Điện Tử Công SuấtThanh TùngNo ratings yet
- Dieu-Khien-Qua-Trinh - C1-Introduction - (Cuuduongthancong - Com)Document46 pagesDieu-Khien-Qua-Trinh - C1-Introduction - (Cuuduongthancong - Com)Khoa NguyenNo ratings yet
- Chapter 1 IntroductionDocument18 pagesChapter 1 IntroductionNguyễn Văn TuấnNo ratings yet
- C1 Introduction PDFDocument46 pagesC1 Introduction PDFTrịnh Văn QuyềnNo ratings yet
- Bài 5 CB Do Luu Luong - MucDocument57 pagesBài 5 CB Do Luu Luong - MucAnh LeeNo ratings yet
- Chương 5Document20 pagesChương 5nhanNo ratings yet
- Tối ưu hóa - Chương 1 - SVDocument37 pagesTối ưu hóa - Chương 1 - SVThanh Pham NgocNo ratings yet
- Giáo trình Quấn dây máy điện xoay chiều một pha có vành góp - Nghề - Điện công nghiệp - Trình độ - Cao đẳng nghề (Tổng cục Dạy nghề) - 1289321Document89 pagesGiáo trình Quấn dây máy điện xoay chiều một pha có vành góp - Nghề - Điện công nghiệp - Trình độ - Cao đẳng nghề (Tổng cục Dạy nghề) - 1289321Lê Văn NhâmNo ratings yet
- Chuong 3 - Dieu Khien Vong Kin Dong Co DC (Compatibility Mode)Document24 pagesChuong 3 - Dieu Khien Vong Kin Dong Co DC (Compatibility Mode)Tan Phat HuỳnhNo ratings yet
- Chương 1 Khái niệm cơ bảnDocument38 pagesChương 1 Khái niệm cơ bảnHuy Quoc NguyenNo ratings yet
- Truyen Dong Dien Chuong 3 Dieu Khien Vong Kin Dong Co DC (Cuuduongthancong - Com)Document24 pagesTruyen Dong Dien Chuong 3 Dieu Khien Vong Kin Dong Co DC (Cuuduongthancong - Com)Quang Nguyen KhanhNo ratings yet
- Chuong 1 Nhung Khai Niem Co BanDocument60 pagesChuong 1 Nhung Khai Niem Co BanHuy TranNo ratings yet
- 19. BBNT Hoàn Thành Lắp Đặt HT 10,5kVDocument6 pages19. BBNT Hoàn Thành Lắp Đặt HT 10,5kVmaidinhtheNo ratings yet
- Báo Cáo Vfe34Document35 pagesBáo Cáo Vfe34v Nguyễn PhướcNo ratings yet
- bài tập1Document13 pagesbài tập1Tú MinhNo ratings yet
- TL VIẾT 2021-CN 23.12Document16 pagesTL VIẾT 2021-CN 23.12Tú MinhNo ratings yet
- Control PFCDocument16 pagesControl PFCTú MinhNo ratings yet
- Slide TTHCX DC DCDocument14 pagesSlide TTHCX DC DCTú MinhNo ratings yet
- Slide - PWM - 3 PhaDocument28 pagesSlide - PWM - 3 PhaTú MinhNo ratings yet
- Nhóm 11 - Đề tài 6 - Khu CN - Khu dân cưDocument1 pageNhóm 11 - Đề tài 6 - Khu CN - Khu dân cưTú MinhNo ratings yet
- Fundamental of SoftStarterDocument69 pagesFundamental of SoftStarterTú Minh100% (1)
- TBD-DT pptx1Document33 pagesTBD-DT pptx1Tú MinhNo ratings yet
- Nghiên Cứu Phương Pháp X Ử Lý Nước Thải Cứa Xí Nghiệp Sản Xuất Giây Lam Kinh - Thanh HoáDocument7 pagesNghiên Cứu Phương Pháp X Ử Lý Nước Thải Cứa Xí Nghiệp Sản Xuất Giây Lam Kinh - Thanh HoáTú MinhNo ratings yet
- TBD DT - pptx1Document33 pagesTBD DT - pptx1Tú MinhNo ratings yet
- BTL HT lọc bụi tĩnh điệnDocument22 pagesBTL HT lọc bụi tĩnh điệnTú MinhNo ratings yet
- BTL DCSDocument60 pagesBTL DCSTú MinhNo ratings yet
- Nhóm 11 - Đề tài 2 - Nhà máy giấyDocument1 pageNhóm 11 - Đề tài 2 - Nhà máy giấyTú MinhNo ratings yet
- Science TechnologyDocument8 pagesScience TechnologyTú MinhNo ratings yet
- (123doc) - Dieu-Khien-Ban-May-Bao-GiuongDocument23 pages(123doc) - Dieu-Khien-Ban-May-Bao-GiuongTú MinhNo ratings yet
- BT1 PLC trong điều khiển chuyển động 1Document6 pagesBT1 PLC trong điều khiển chuyển động 1Tú MinhNo ratings yet
- Hướng dẫn trình bày quyển ĐATN-Truong DDT-Áp dụng từ 20182Document40 pagesHướng dẫn trình bày quyển ĐATN-Truong DDT-Áp dụng từ 20182Tú MinhNo ratings yet
- Ngân HàngDocument4 pagesNgân HàngTú MinhNo ratings yet
- An ninh phòng giao dịchDocument9 pagesAn ninh phòng giao dịchTú MinhNo ratings yet
- Nút nhấn khẩn cấp SOSDocument4 pagesNút nhấn khẩn cấp SOSTú MinhNo ratings yet
- Nhóm 11 - XLNT - 20211Document42 pagesNhóm 11 - XLNT - 20211Tú MinhNo ratings yet
- Bản Báo Cáo Đề Tài Nhóm 6 (WORD)Document66 pagesBản Báo Cáo Đề Tài Nhóm 6 (WORD)Tú MinhNo ratings yet
- Học Viện Công Nghệ Bưu Chính Viễn ThôngDocument77 pagesHọc Viện Công Nghệ Bưu Chính Viễn ThôngTú MinhNo ratings yet
- M - PH Ng-PilDocument36 pagesM - PH Ng-PilTú MinhNo ratings yet
- Slide PILDocument25 pagesSlide PILTú Minh100% (1)
- Bài tập lớn BMS nhóm 16 finalDocument29 pagesBài tập lớn BMS nhóm 16 finalTú MinhNo ratings yet
- Bản Thuyết Trình 1Document30 pagesBản Thuyết Trình 1Tú MinhNo ratings yet